
基于改进多目标粒子群算法的双馈风机控制参数辨识方法.pdf

静芙****可爱


1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于改进多目标粒子群算法的双馈风机控制参数辨识方法.pdf
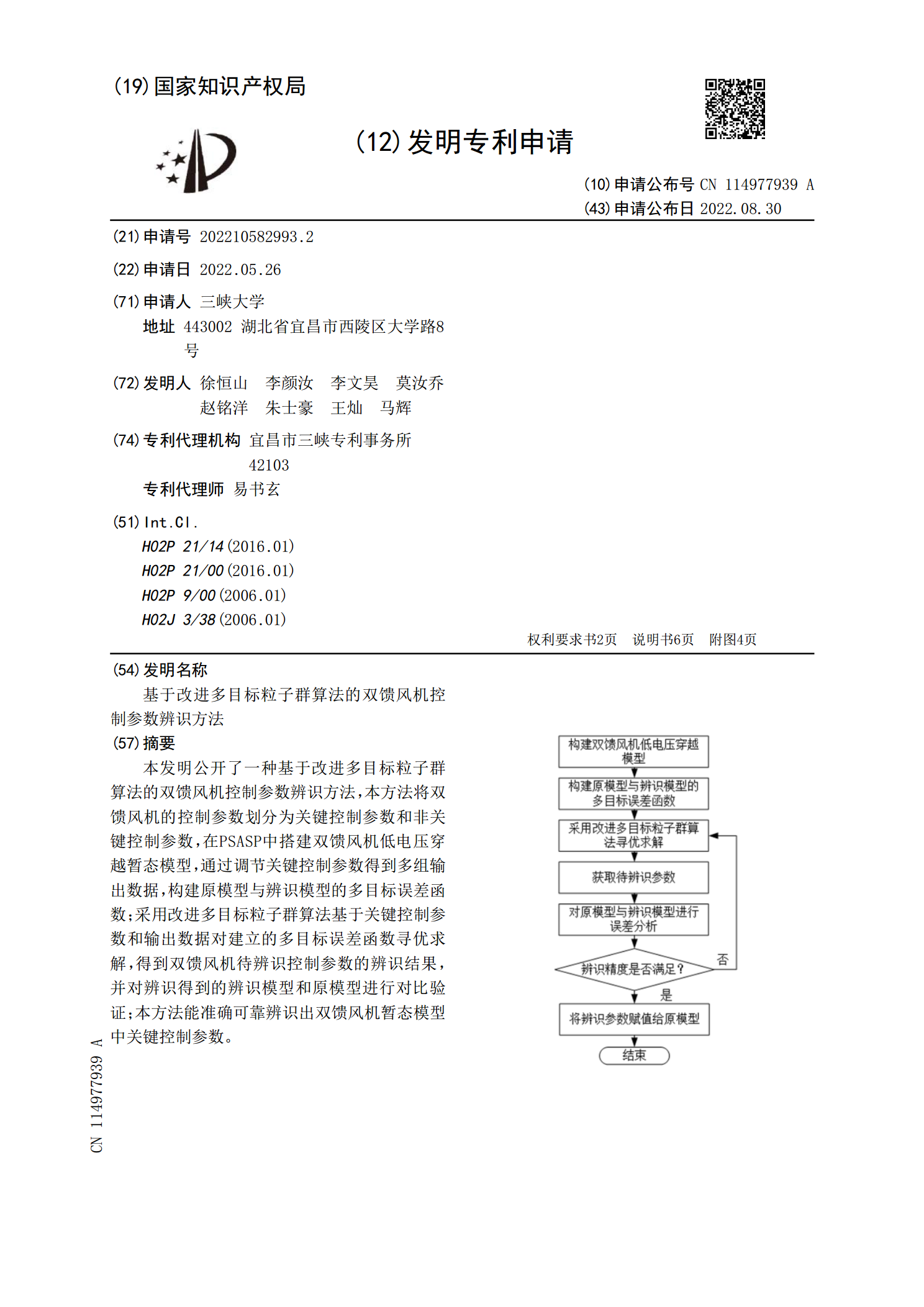
本发明公开了一种基于改进多目标粒子群算法的双馈风机控制参数辨识方法,本方法将双馈风机的控制参数划分为关键控制参数和非关键控制参数,在PSASP中搭建双馈风机低电压穿越暂态模型,通过调节关键控制参数得到多组输出数据,构建原模型与辨识模型的多目标误差函数;采用改进多目标粒子群算法基于关键控制参数和输出数据对建立的多目标误差函数寻优求解,得到双馈风机待辨识控制参数的辨识结果,并对辨识得到的辨识模型和原模型进行对比验证;本方法能准确可靠辨识出双馈风机暂态模型中关键控制参数。

基于改进粒子群算法的超级电容参数辨识.docx
基于改进粒子群算法的超级电容参数辨识标题:基于改进粒子群算法的超级电容参数辨识摘要:超级电容是一种具有高能量密度和长寿命特性的新型能量储存装置。准确的超级电容参数辨识对于设计和控制超级电容系统至关重要。本文基于改进粒子群算法(ImprovedParticleSwarmOptimization,IPSP)提出了一种超级电容参数辨识方法。该方法综合考虑了超级电容的特性和模型,通过建立精确的参数辨识模型,并利用IPSP算法进行参数优化搜索,实现对超级电容参数的高精度辨识。关键词:超级电容,参数辨识,改进粒子群算
一种基于改进灰狼算法的双馈风力发电机参数辨识方法.pdf
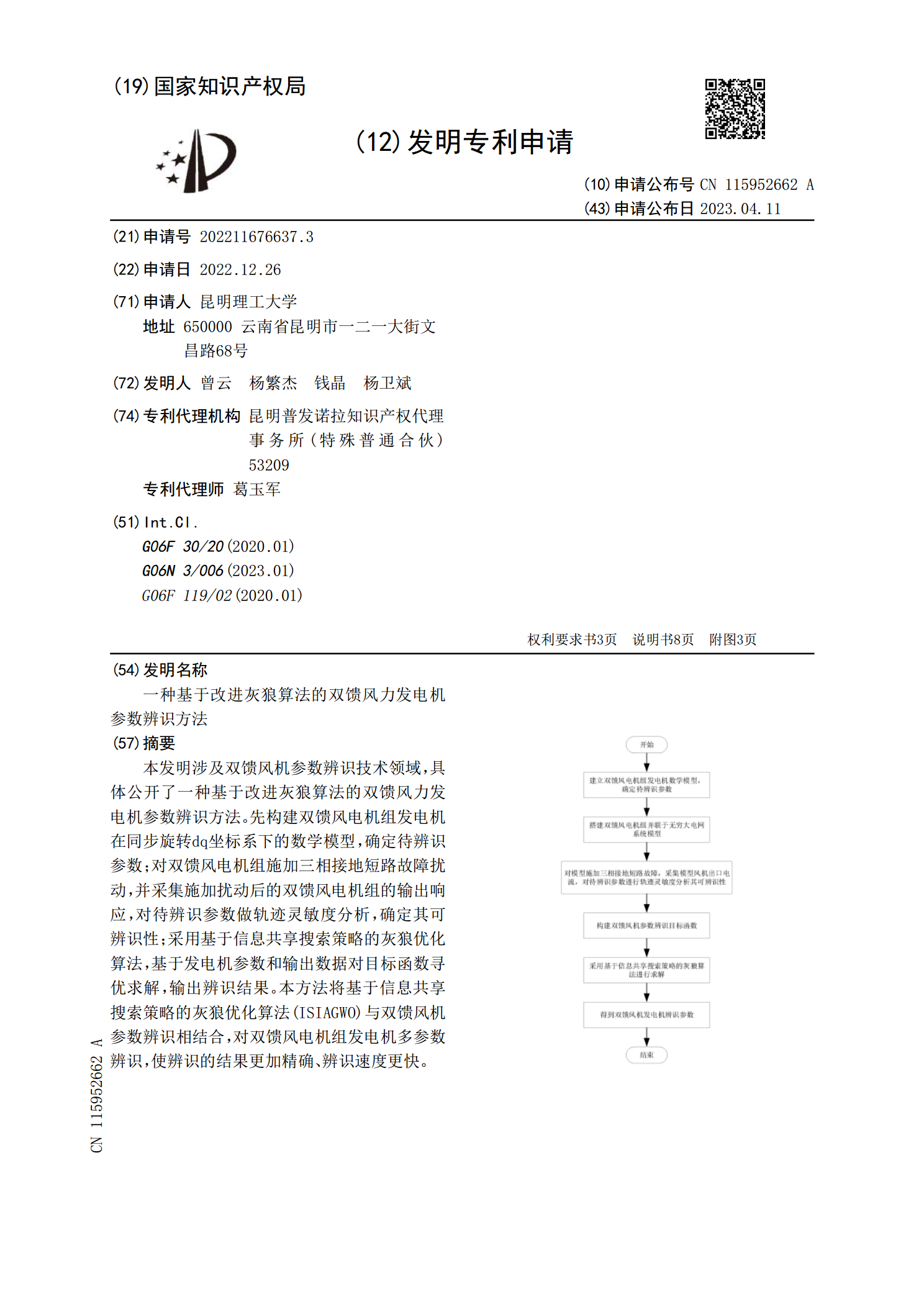
本发明涉及双馈风机参数辨识技术领域,具体公开了一种基于改进灰狼算法的双馈风力发电机参数辨识方法。先构建双馈风电机组发电机在同步旋转dq坐标系下的数学模型,确定待辨识参数;对双馈风电机组施加三相接地短路故障扰动,并采集施加扰动后的双馈风电机组的输出响应,对待辨识参数做轨迹灵敏度分析,确定其可辨识性;采用基于信息共享搜索策略的灰狼优化算法,基于发电机参数和输出数据对目标函数寻优求解,输出辨识结果。本方法将基于信息共享搜索策略的灰狼优化算法(ISIAGWO)与双馈风机参数辨识相结合,对双馈风电机组发电机多参数辨

基于云模型的改进粒子群PMSM参数辨识算法.docx
基于云模型的改进粒子群PMSM参数辨识算法基于云模型的改进粒子群PMSM参数辨识算法摘要:随着永磁同步电机(PermanentMagnetSynchronousMotor,PMSM)在电机领域的广泛应用,对其参数进行准确辨识成为极为重要的课题。本文基于云模型,结合改进的粒子群算法,提出了一种改进的PMSM参数辨识算法。在该算法中,将云模型引入到PMSM参数辨识中,利用云模型的模糊性和不确定性对参数进行描述,增强了对参数的辨识能力。同时,通过引入改进的粒子群算法,优化了算法的搜索过程,提高了参数辨识的精度和
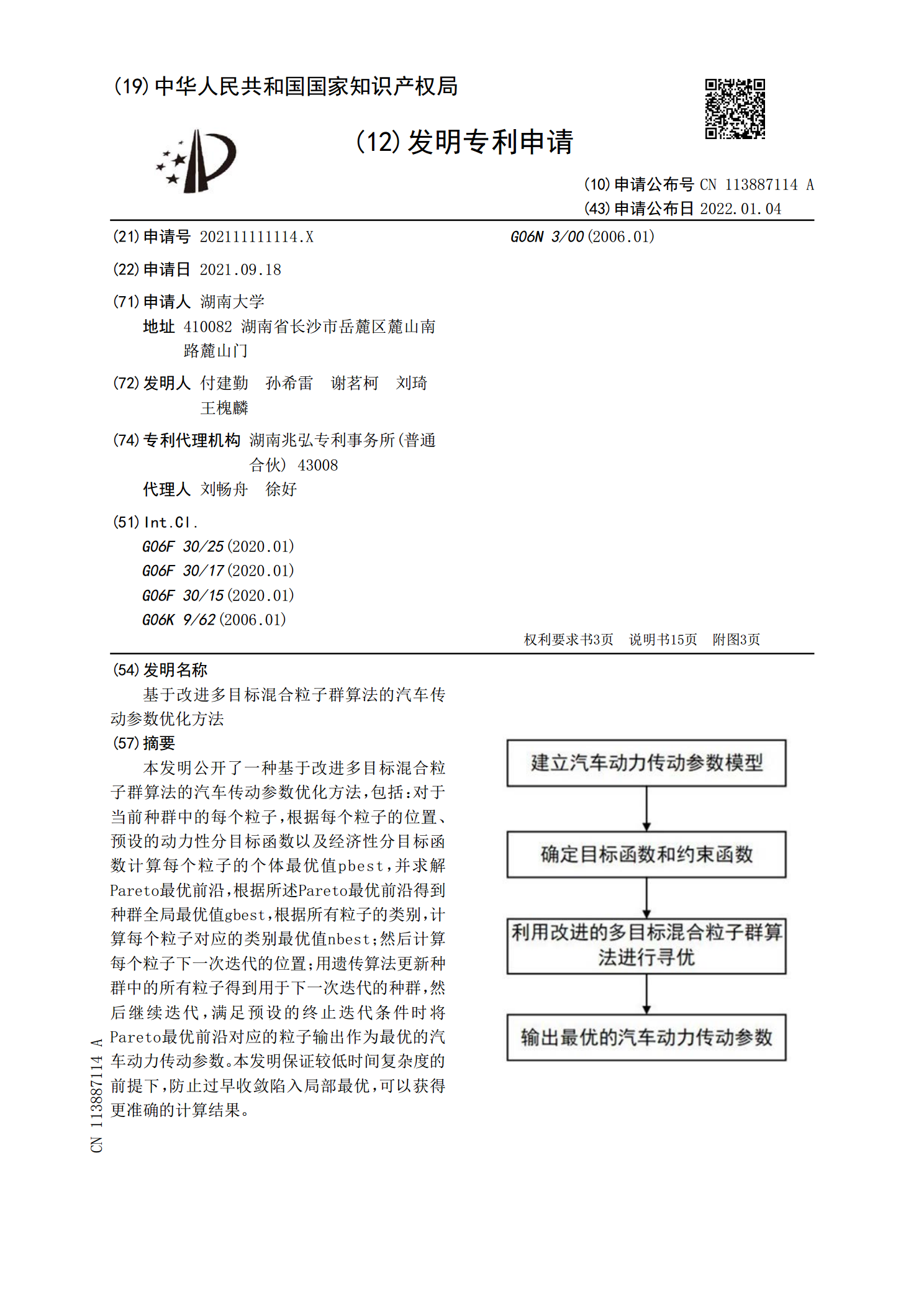
基于改进多目标混合粒子群算法的汽车传动参数优化方法.pdf
本发明公开了一种基于改进多目标混合粒子群算法的汽车传动参数优化方法,包括:对于当前种群中的每个粒子,根据每个粒子的位置、预设的动力性分目标函数以及经济性分目标函数计算每个粒子的个体最优值pbest,并求解Pareto最优前沿,根据所述Pareto最优前沿得到种群全局最优值gbest,根据所有粒子的类别,计算每个粒子对应的类别最优值nbest;然后计算每个粒子下一次迭代的位置;用遗传算法更新种群中的所有粒子得到用于下一次迭代的种群,然后继续迭代,满足预设的终止迭代条件时将Pareto最优前沿对应的粒子输出作