
一种液驱机械臂的控制方法、装置、电子设备及存储介质.pdf

猫巷****晓容

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种液驱机械臂的控制方法、装置、电子设备及存储介质.pdf
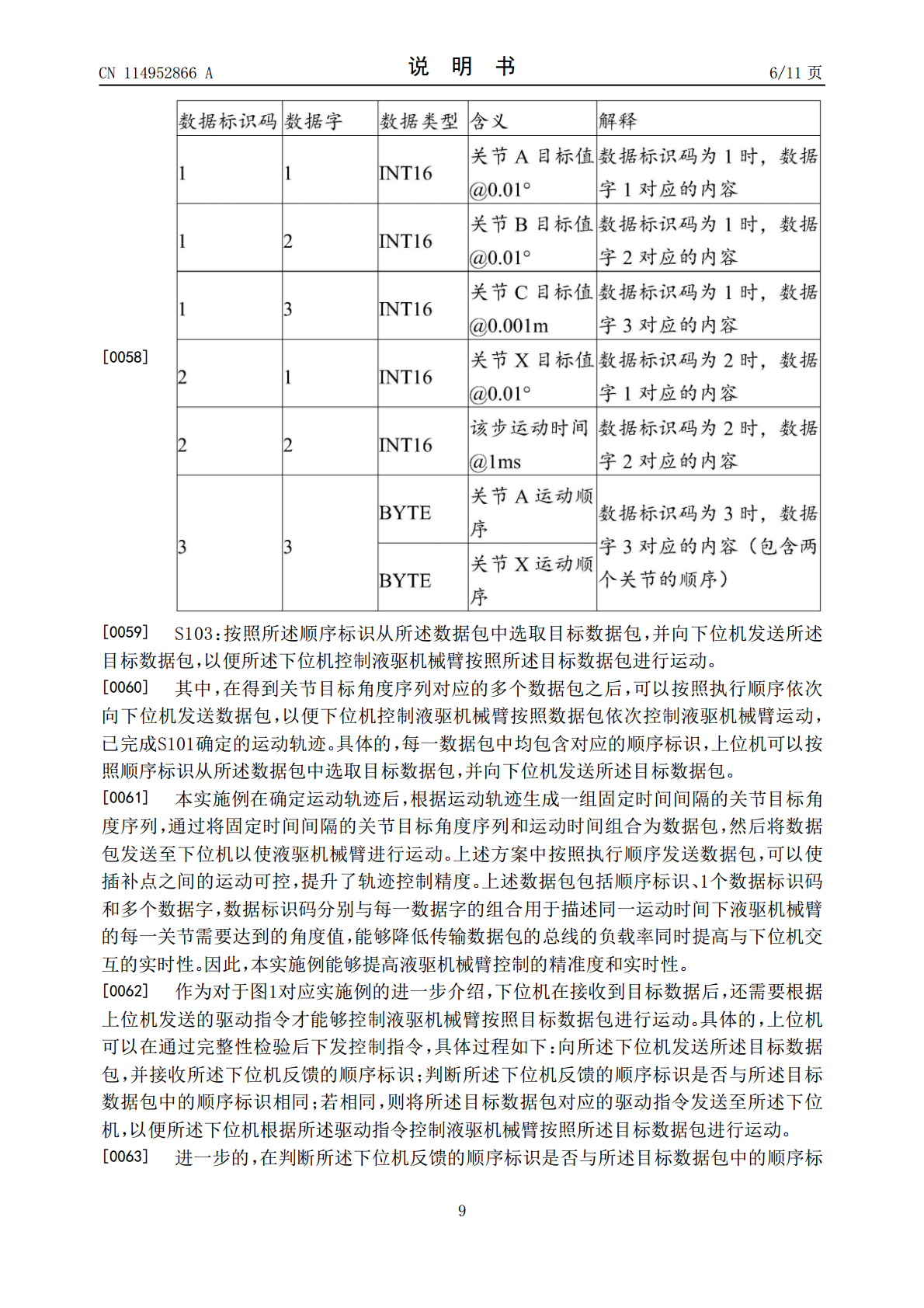
本申请公开了一种液驱机械臂的控制方法、装置、电子设备及存储介质,所属的技术领域为工程机械领域。所述方法包括:根据目标位姿和当前位姿确定运动轨迹,并根据所述运动轨迹生成一组固定时间间隔的关节目标角度序列;将所述关节目标角度序列与运动时间组合为多个数据包;按照所述顺序标识从所述数据包中选取目标数据包,并向下位机发送所述目标数据包,以便所述下位机控制液驱机械臂按照所述目标数据包进行运动。本申请能够提高液驱机械臂控制的精准度和实时性。
机械臂运动控制方法、装置、存储介质及电子设备.pdf
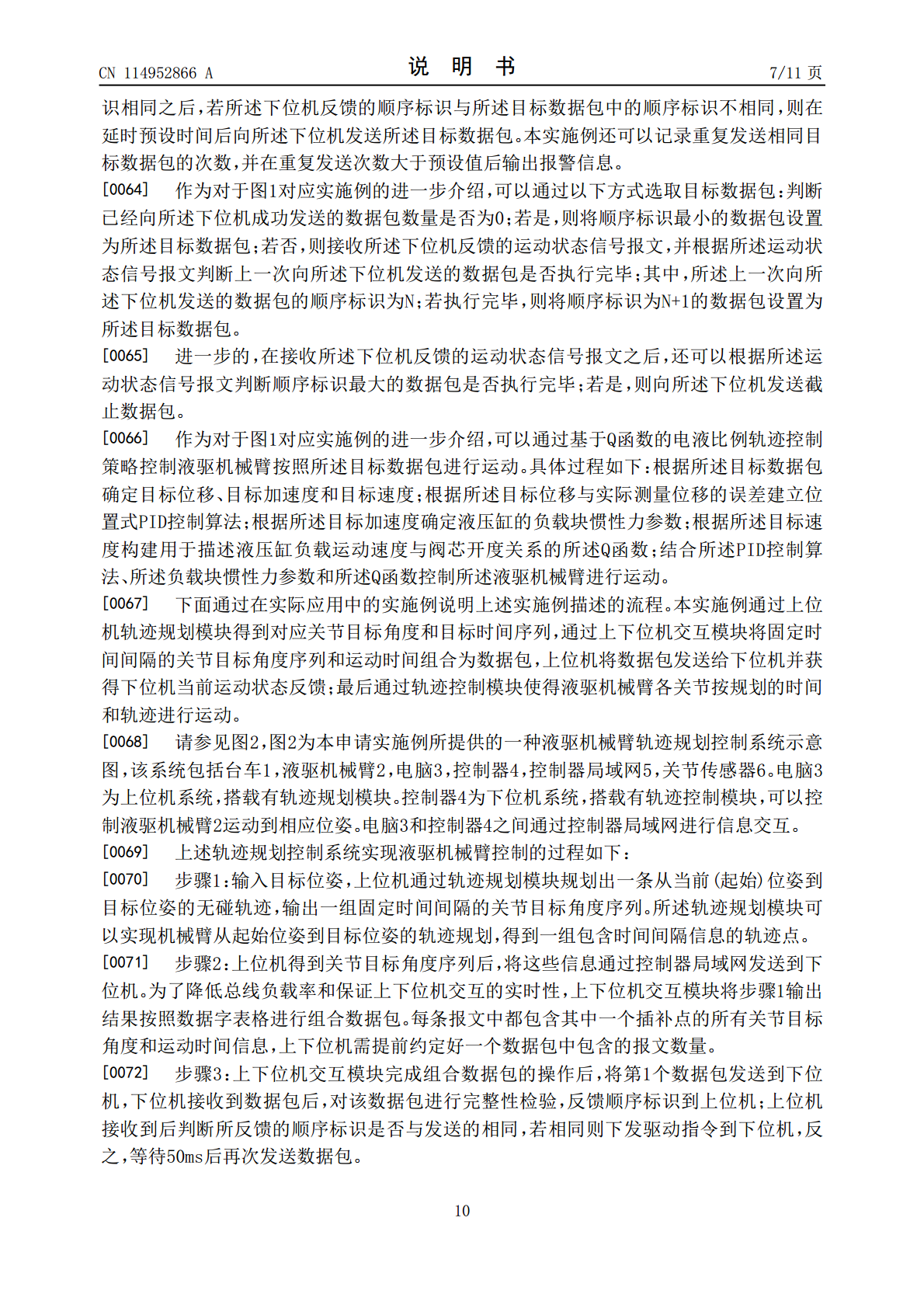
本申请涉及一种机械臂运动控制方法、装置、存储介质及电子设备。所述方法包括:获取机械臂至少两个控制器在目标自由度上的空间插补量,该空间插补量为笛卡尔空间插补量或者关节空间插补量;根据所述空间插补量和预设模型,确定融合插补量;基于所述融合插补量和所述机械臂在所述目标自由度上的当前位姿,确定目标位姿;根据所述目标位姿控制所述机械臂在所述目标自由度上的运动。本申请能够简化对机械臂的运动数据设置,提升机械臂面对复杂工作场景的应对能力。
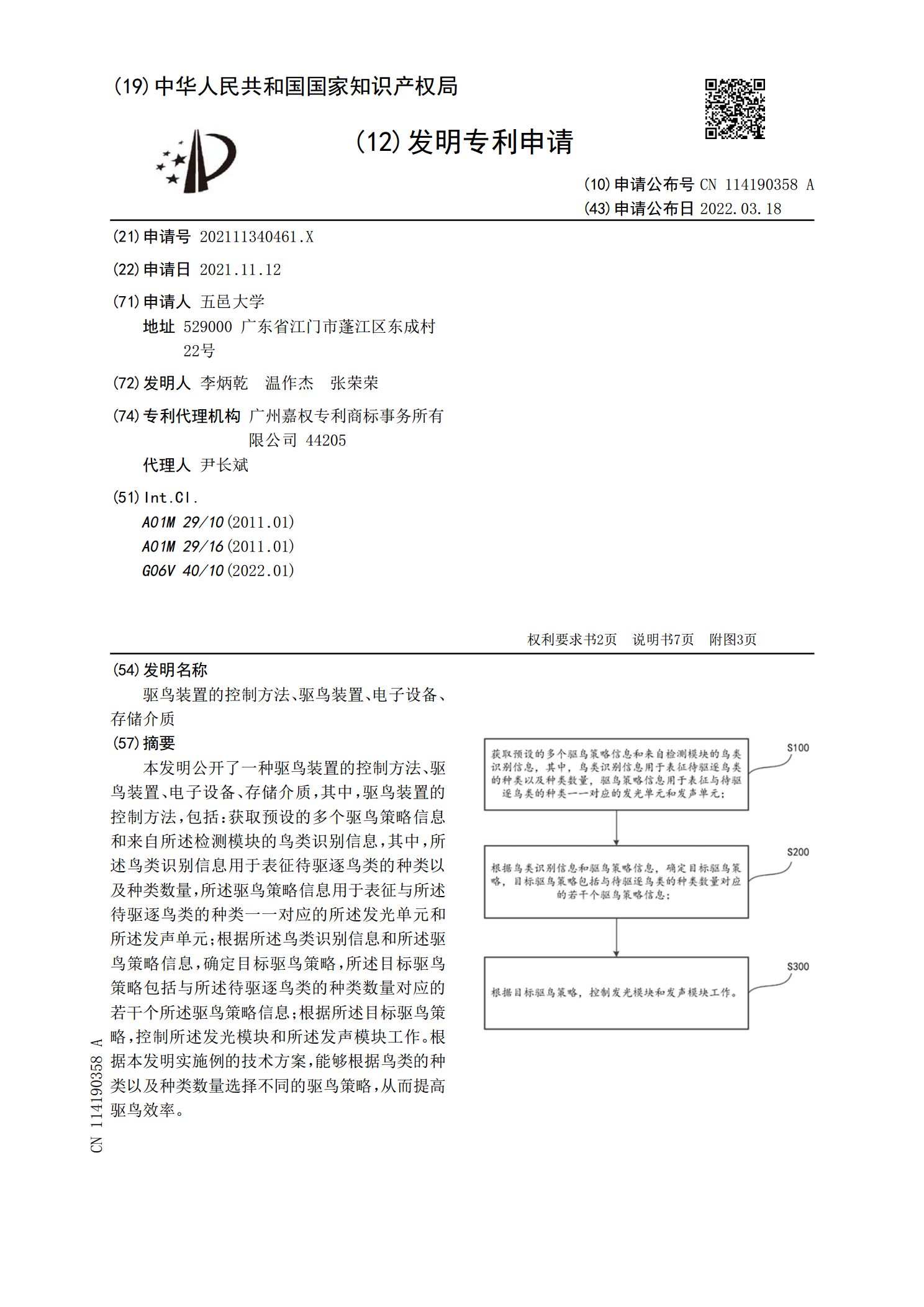
驱鸟装置的控制方法、驱鸟装置、电子设备、存储介质.pdf
本发明公开了一种驱鸟装置的控制方法、驱鸟装置、电子设备、存储介质,其中,驱鸟装置的控制方法,包括:获取预设的多个驱鸟策略信息和来自所述检测模块的鸟类识别信息,其中,所述鸟类识别信息用于表征待驱逐鸟类的种类以及种类数量,所述驱鸟策略信息用于表征与所述待驱逐鸟类的种类一一对应的所述发光单元和所述发声单元;根据所述鸟类识别信息和所述驱鸟策略信息,确定目标驱鸟策略,所述目标驱鸟策略包括与所述待驱逐鸟类的种类数量对应的若干个所述驱鸟策略信息;根据所述目标驱鸟策略,控制所述发光模块和所述发声模块工作。根据本发明实施例
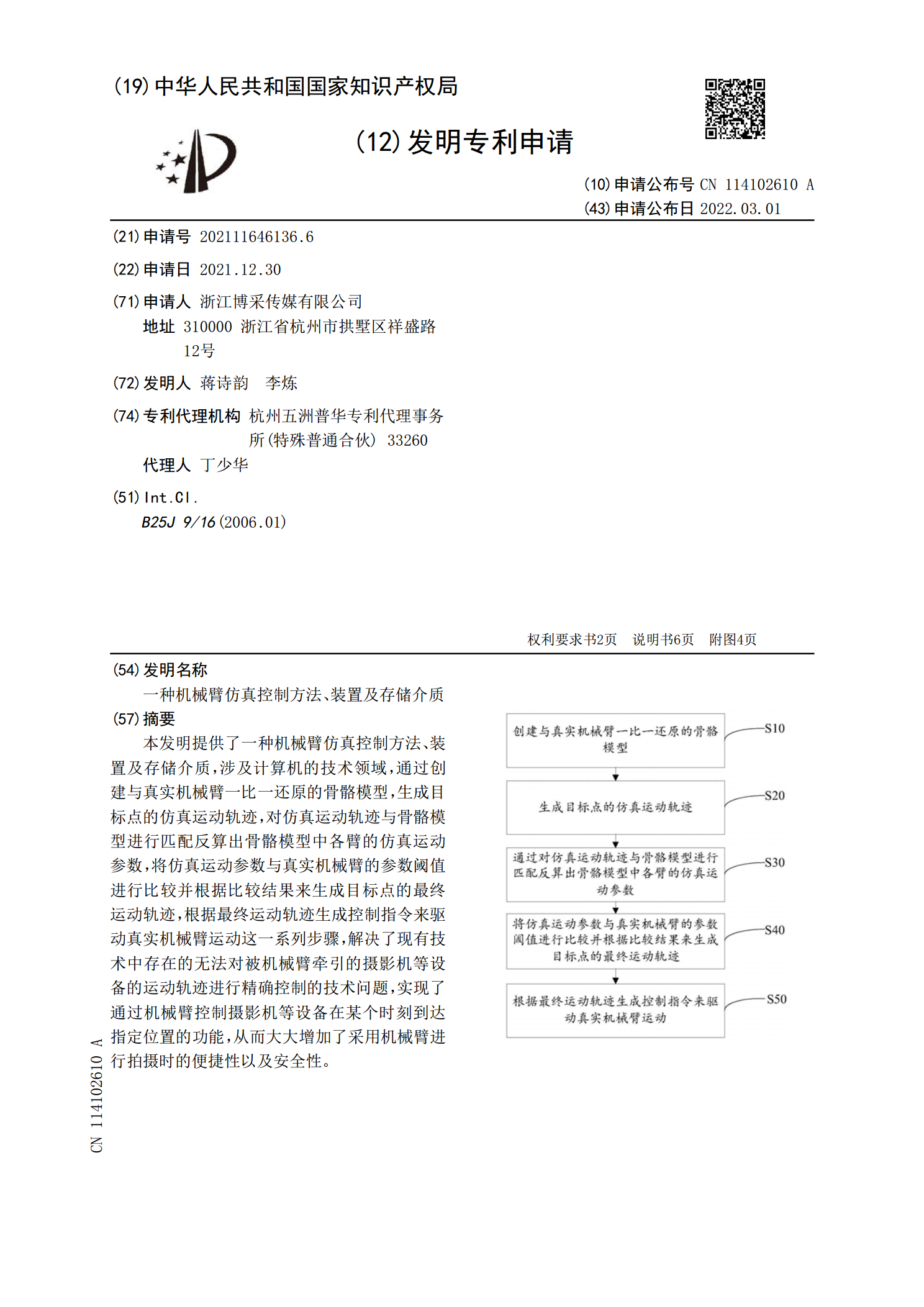
一种机械臂仿真控制方法、装置及存储介质.pdf
本发明提供了一种机械臂仿真控制方法、装置及存储介质,涉及计算机的技术领域,通过创建与真实机械臂一比一还原的骨骼模型,生成目标点的仿真运动轨迹,对仿真运动轨迹与骨骼模型进行匹配反算出骨骼模型中各臂的仿真运动参数,将仿真运动参数与真实机械臂的参数阈值进行比较并根据比较结果来生成目标点的最终运动轨迹,根据最终运动轨迹生成控制指令来驱动真实机械臂运动这一系列步骤,解决了现有技术中存在的无法对被机械臂牵引的摄影机等设备的运动轨迹进行精确控制的技术问题,实现了通过机械臂控制摄影机等设备在某个时刻到达指定位置的功能,从
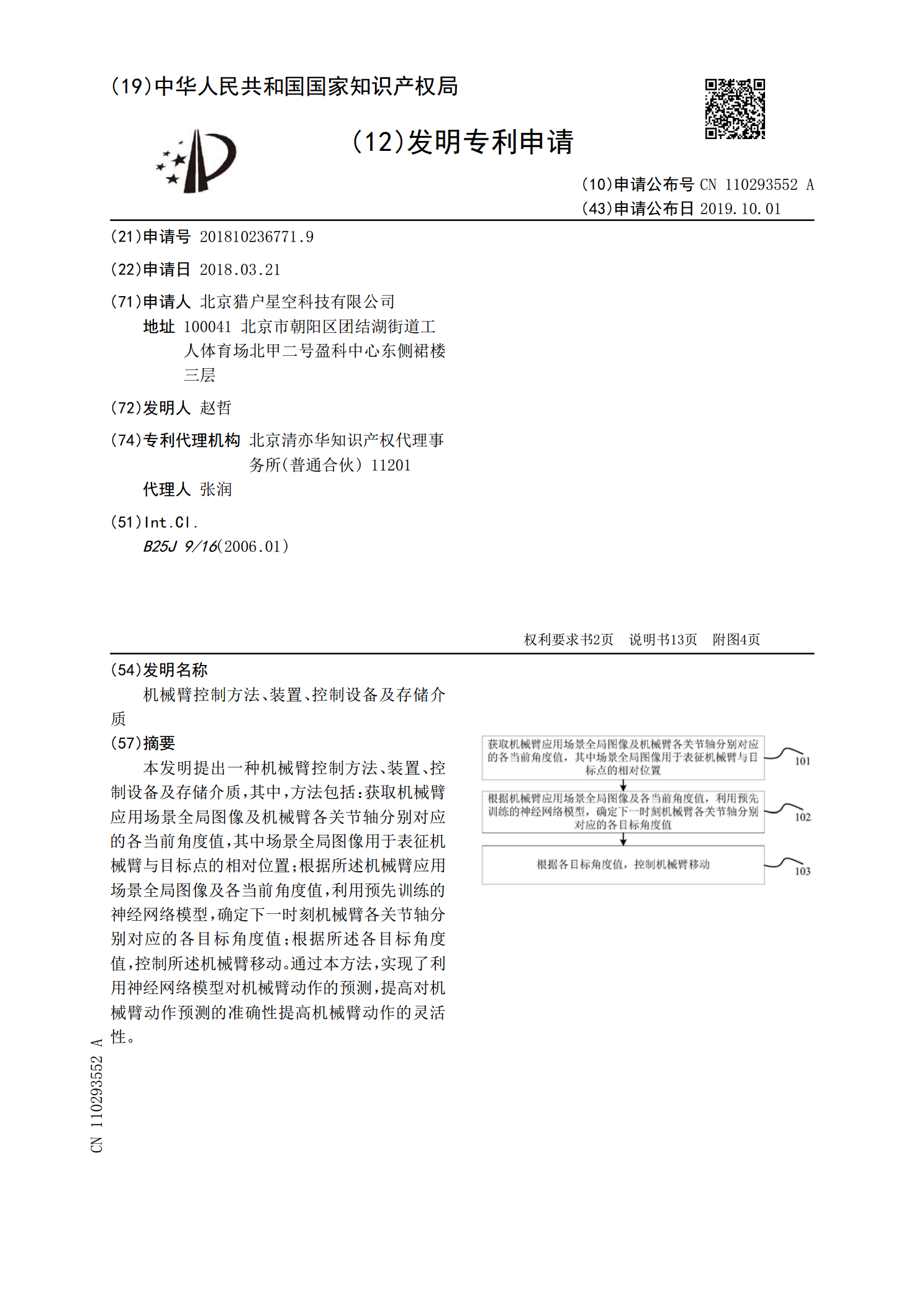
机械臂控制方法、装置、控制设备及存储介质.pdf
本发明提出一种机械臂控制方法、装置、控制设备及存储介质,其中,方法包括:获取机械臂应用场景全局图像及机械臂各关节轴分别对应的各当前角度值,其中场景全局图像用于表征机械臂与目标点的相对位置;根据所述机械臂应用场景全局图像及各当前角度值,利用预先训练的神经网络模型,确定下一时刻机械臂各关节轴分别对应的各目标角度值;根据所述各目标角度值,控制所述机械臂移动。通过本方法,实现了利用神经网络模型对机械臂动作的预测,提高对机械臂动作预测的准确性提高机械臂动作的灵活性。