
获取静态目标的角度信息的方法、装置,以及SLAM系统.pdf

一只****呀9

1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
获取静态目标的角度信息的方法、装置,以及SLAM系统.pdf
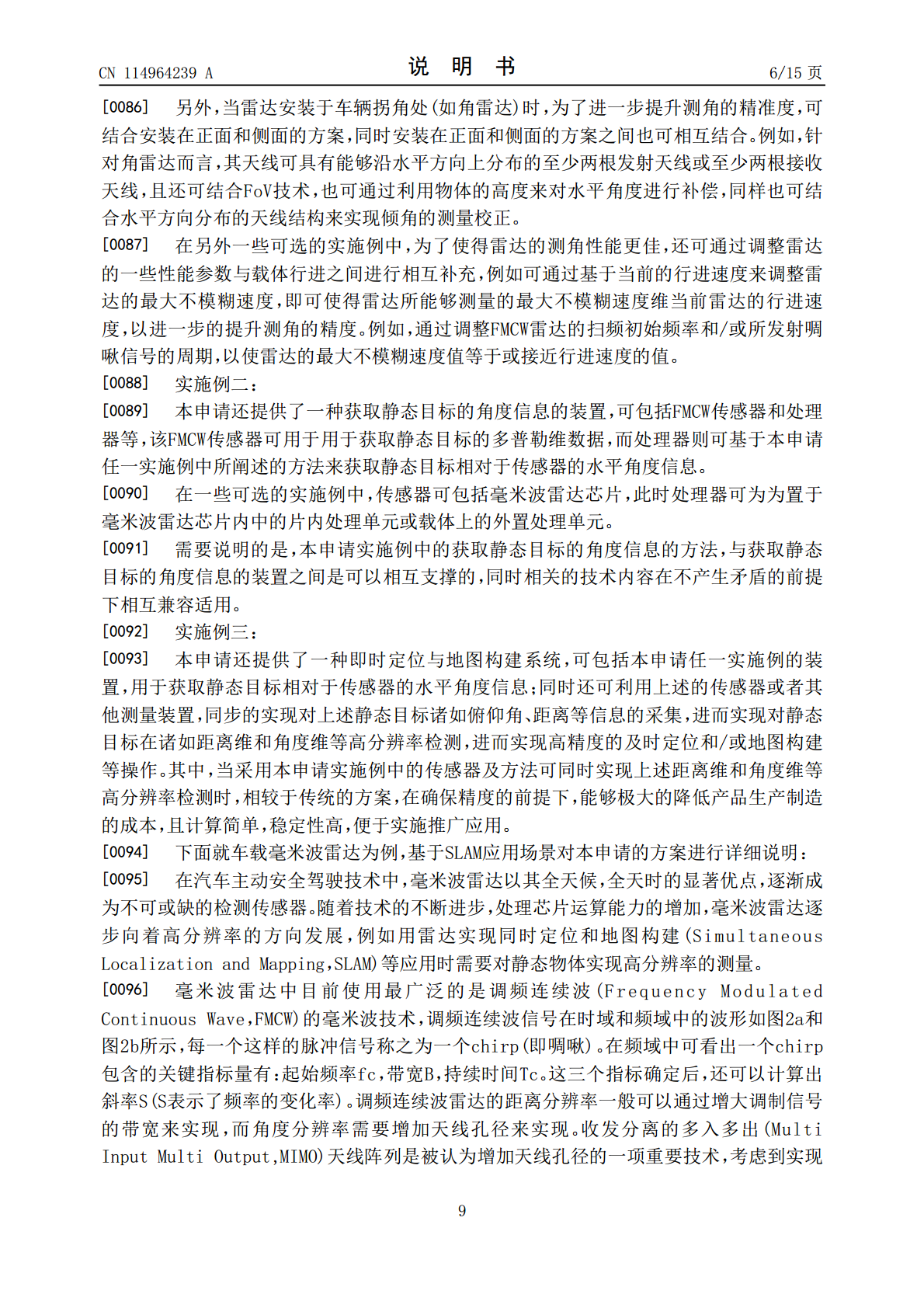
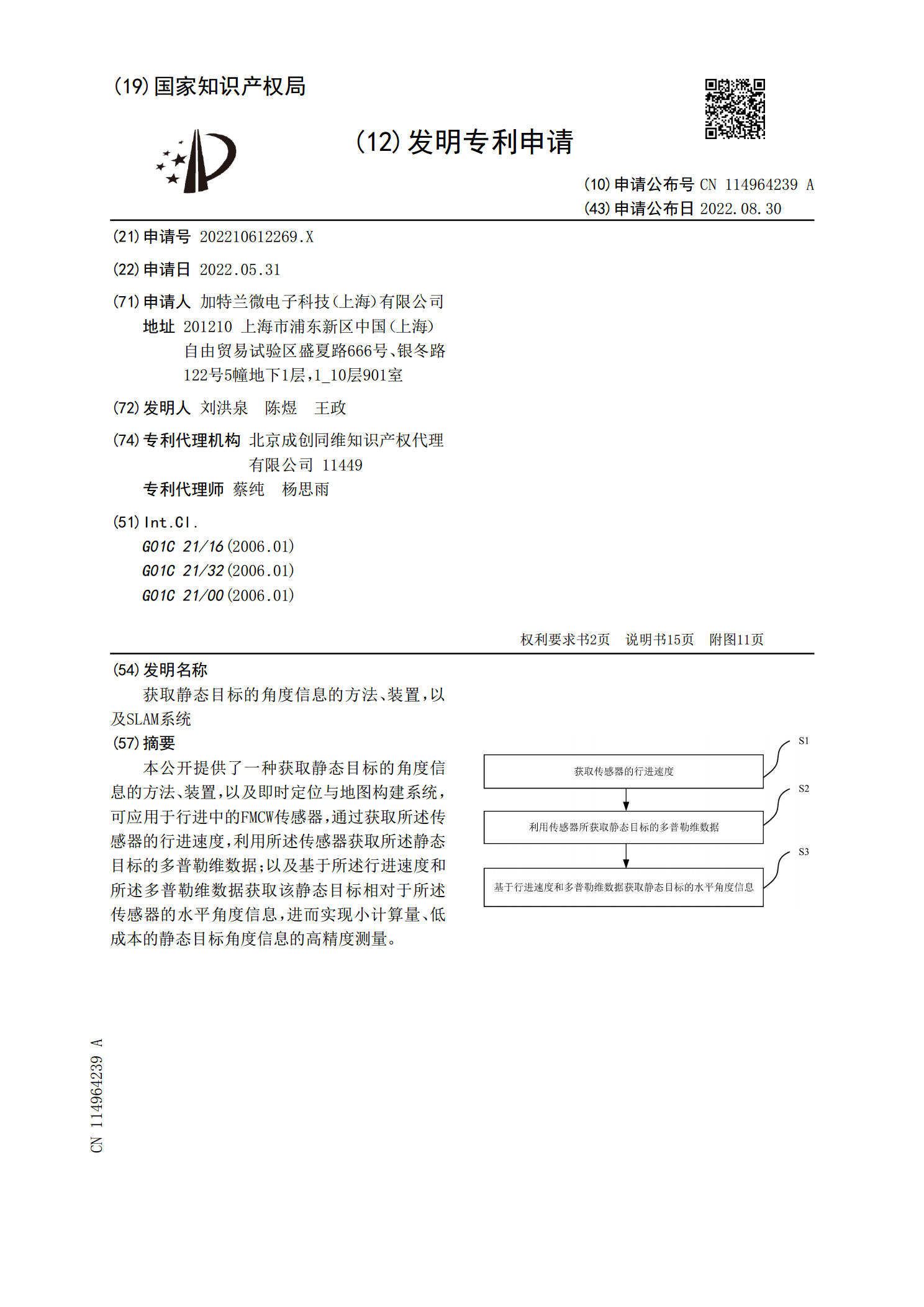
本公开提供了一种获取静态目标的角度信息的方法、装置,以及即时定位与地图构建系统,可应用于行进中的FMCW传感器,通过获取所述传感器的行进速度,利用所述传感器获取所述静态目标的多普勒维数据;以及基于所述行进速度和所述多普勒维数据获取该静态目标相对于所述传感器的水平角度信息,进而实现小计算量、低成本的静态目标角度信息的高精度测量。

远程维护信息获取方法、装置以及系统.pdf
本申请公开了一种远程维护信息获取方法、装置以及系统。其中,该方法包括:移动网关响应于移动终端发送的第一触发指令,向目标远端设备发送第一连接请求;移动网关响应于目标远端设备发出的第一确认指令,移动网关与目标远端设备建立网络连接,第一确认指令用于允许移动网关建立与目标远端设备的连接;移动网关将获取到的故障设备的故障信息发送到目标远端设备,并接收目标远端设备发送的维护信息,故障信息由移动网关通过与移动网关连接的故障设备的配置接口获取。该方法通过移动网关实现了远程对故障设备进行维护至少解决了由于缺乏远程获取维护信
信息获取方法以及装置.pdf
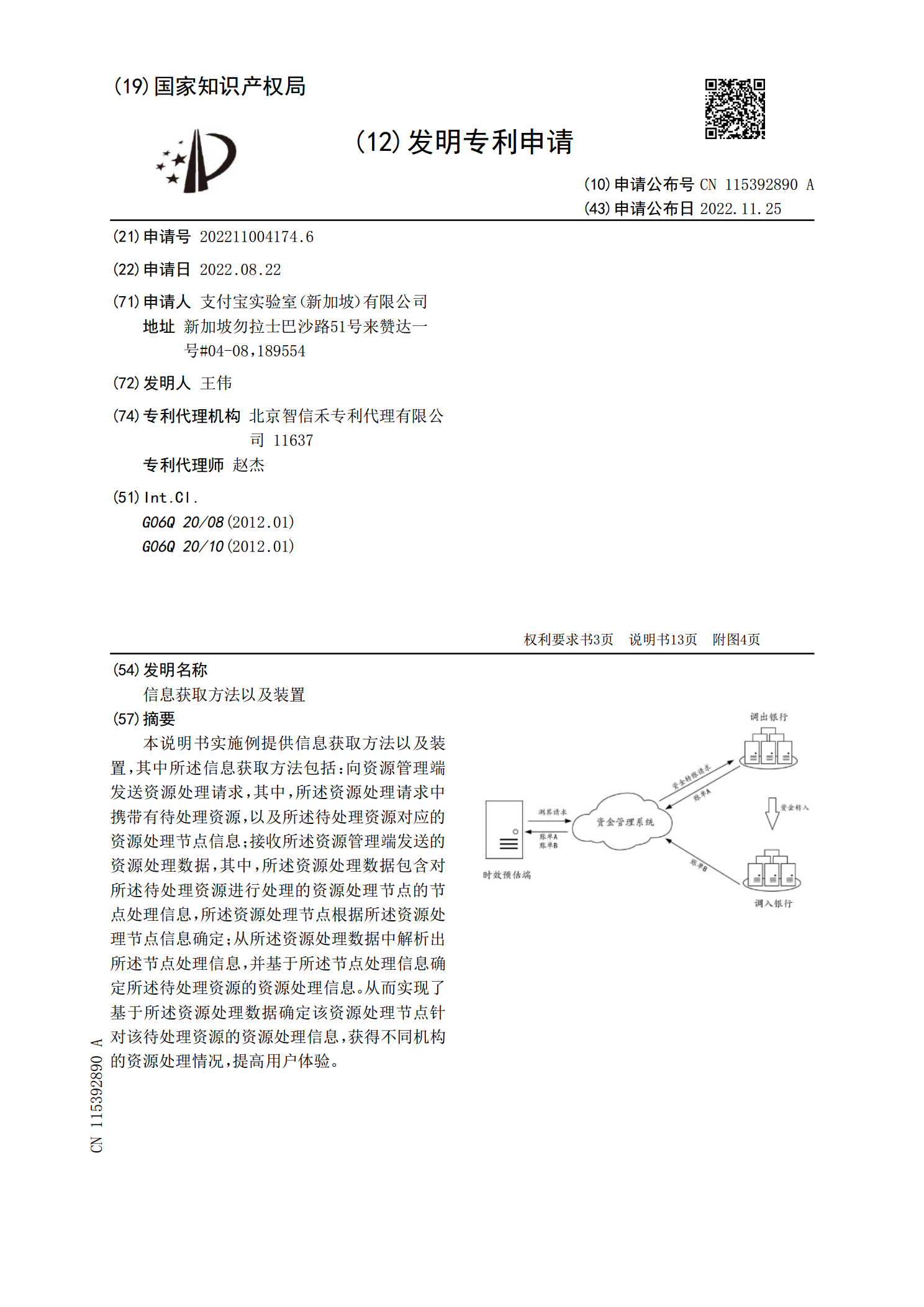
本说明书实施例提供信息获取方法以及装置,其中所述信息获取方法包括:向资源管理端发送资源处理请求,其中,所述资源处理请求中携带有待处理资源,以及所述待处理资源对应的资源处理节点信息;接收所述资源管理端发送的资源处理数据,其中,所述资源处理数据包含对所述待处理资源进行处理的资源处理节点的节点处理信息,所述资源处理节点根据所述资源处理节点信息确定;从所述资源处理数据中解析出所述节点处理信息,并基于所述节点处理信息确定所述待处理资源的资源处理信息。从而实现了基于所述资源处理数据确定该资源处理节点针对该待处理资源的
页面推送方法、装置、系统及信息获取方法、装置.pdf
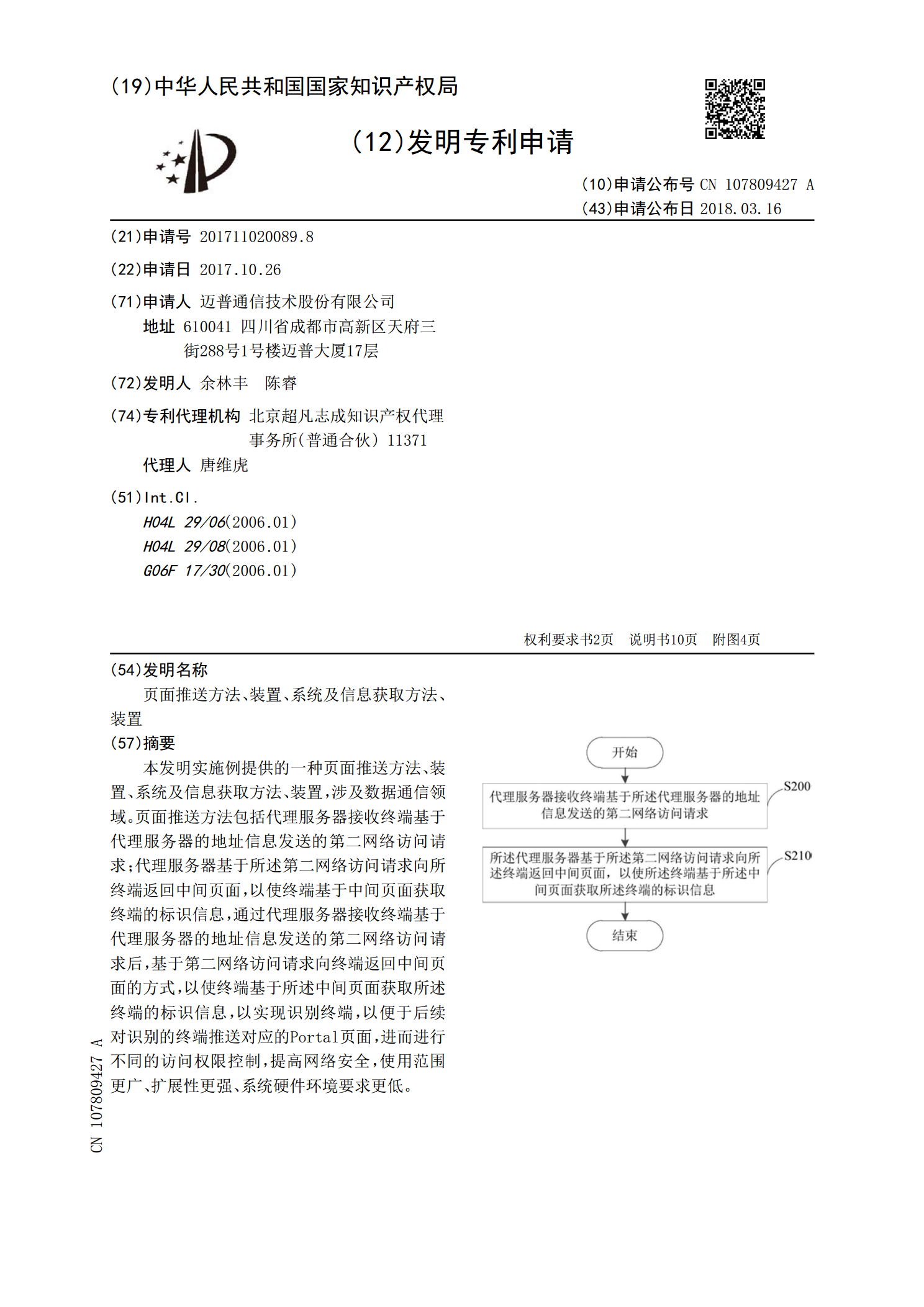
本发明实施例提供的一种页面推送方法、装置、系统及信息获取方法、装置,涉及数据通信领域。页面推送方法包括代理服务器接收终端基于代理服务器的地址信息发送的第二网络访问请求;代理服务器基于所述第二网络访问请求向所终端返回中间页面,以使终端基于中间页面获取终端的标识信息,通过代理服务器接收终端基于代理服务器的地址信息发送的第二网络访问请求后,基于第二网络访问请求向终端返回中间页面的方式,以使终端基于所述中间页面获取所述终端的标识信息,以实现识别终端,以便于后续对识别的终端推送对应的Portal页面,进而进行不同的
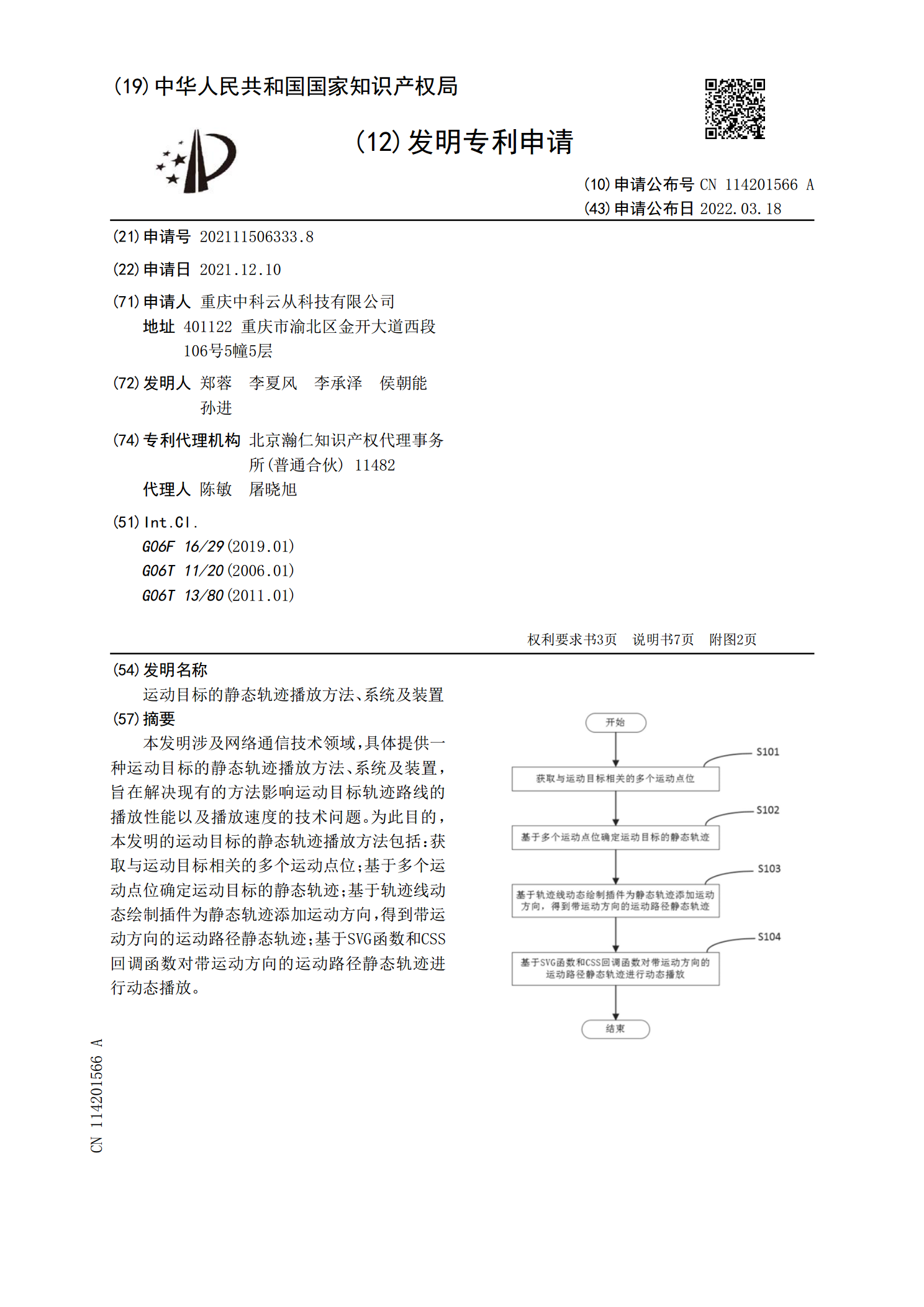
运动目标的静态轨迹播放方法、系统及装置.pdf
本发明涉及网络通信技术领域,具体提供一种运动目标的静态轨迹播放方法、系统及装置,旨在解决现有的方法影响运动目标轨迹路线的播放性能以及播放速度的技术问题。为此目的,本发明的运动目标的静态轨迹播放方法包括:获取与运动目标相关的多个运动点位;基于多个运动点位确定运动目标的静态轨迹;基于轨迹线动态绘制插件为静态轨迹添加运动方向,得到带运动方向的运动路径静态轨迹;基于SVG函数和CSS回调函数对带运动方向的运动路径静态轨迹进行动态播放。