
一种超重型底盘悬架横臂轻量化设计分析方法及相关装置.pdf

猫巷****盟主


1/10
2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种超重型底盘悬架横臂轻量化设计分析方法及相关装置.pdf
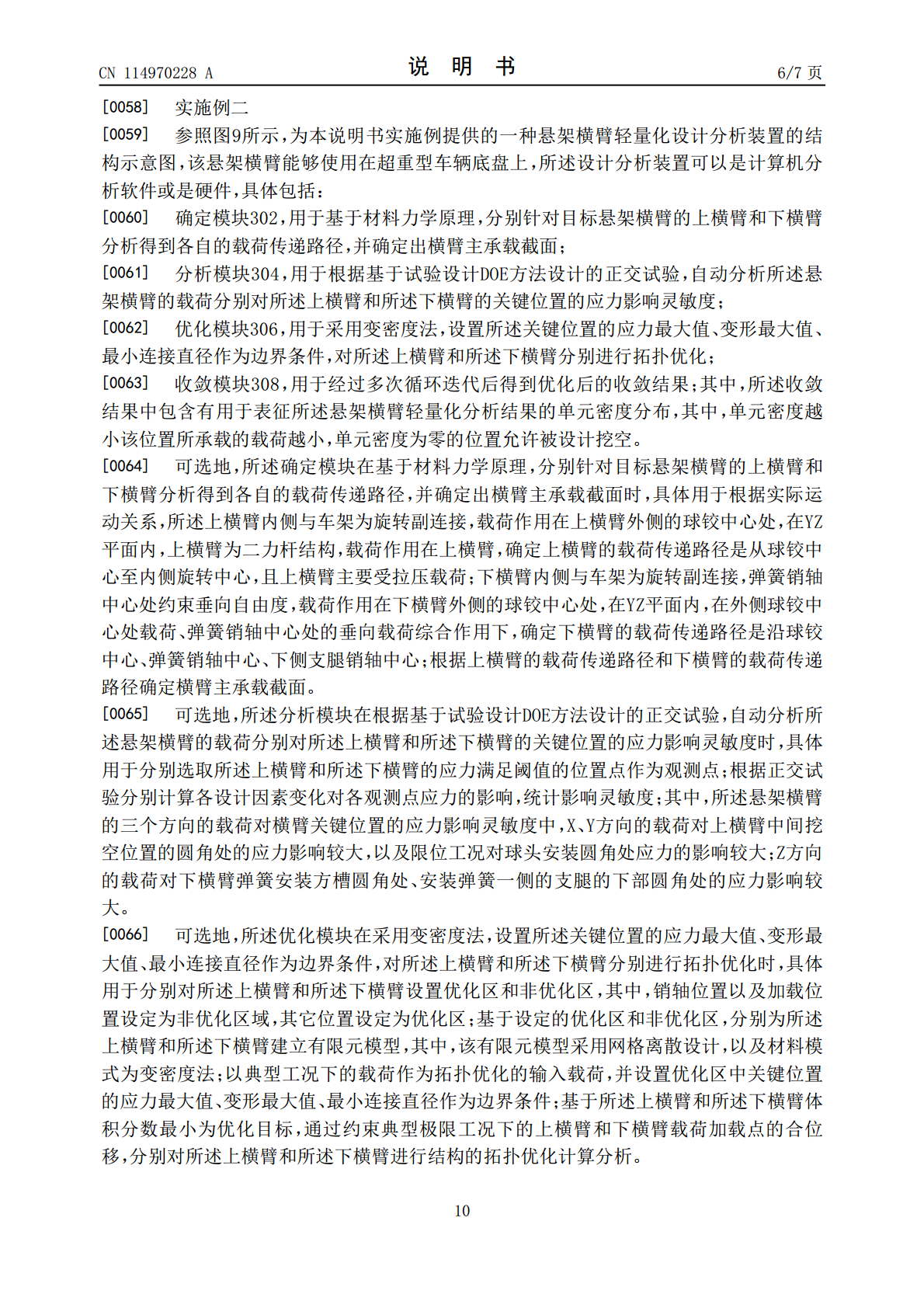
本说明书一个或多个实施例公开了一种超重型底盘悬架横臂轻量化设计分析方法及相关装置,该方案包括:基于材料力学原理,分别针对目标悬架横臂的上横臂和下横臂分析得到各自的载荷传递路径,并确定出横臂主承载截面;根据基于试验设计方法设计的正交试验,自动分析所述悬架横臂的载荷分别对悬架横臂关键位置的应力影响灵敏度;采用变密度法,设置边界条件,对上横臂和下横臂分别进行拓扑优化;经过多次循环迭代后得到优化后的收敛结果;其中,收敛结果中包含有用于表征悬架横臂轻量化分析结果的单元密度分布,其中,单元密度越小该位置所承载的载荷越

双横臂独立悬架-转向系统的分析与设计.docx
汽车设计课程设计双横臂独立悬架-转向系统的分析与设计金世奇1020602014双横臂独立悬架-转向系统的分析与设计一、设计任务1.问题描述图1所示为汽车前轮采用的一种双横臂悬架-转向系统机构示意图(简化),导向机构ABCD由上横臂AB、转向主销BC和下横臂CD及车架AD构成。其中,A、D分别为上、下横臂与车架联接的铰销中心(假定两铰销轴线均平行于车辆纵向),B、C分别为转向主销BC与上、下横臂联接的球铰中心。在车辆横向垂直平面内,上、下横臂相对水平面的摆角分别用、表示,转向主销内倾角用0表示。转向传
双横臂独立悬架-转向系统的分析与设计.docx
汽车设计课程设计双横臂独立悬架-转向系统的分析与设计金世奇1020602014双横臂独立悬架-转向系统的分析与设计一、设计任务1.问题描述图1所示为汽车前轮采用的一种双横臂悬架-转向系统机构示意图(简化),导向机构ABCD由上横臂AB、转向主销BC和下横臂CD及车架AD构成。其中,A、D分别为上、下横臂与车架联接的铰销中心(假定两铰销轴线均平行于车辆纵向),B、C分别为转向主销BC与上、下横臂联接的球铰中心。在车辆横向垂直平面内,上、下横臂相对水平面的摆角分别用、表示,转向主销内倾角用0表示。转向传

双横臂独立悬架-转向系统的分析与设计.docx
汽车设计课程设计双横臂独立悬架-转向系统的分析与设计金世奇1020602014双横臂独立悬架-转向系统的分析与设计一、设计任务1.问题描述图1所示为汽车前轮采用的一种双横臂悬架-转向系统机构示意图(简化),导向机构ABCD由上横臂AB、转向主销BC和下横臂CD及车架AD构成。其中,A、D分别为上、下横臂与车架联接的铰销中心(假定两铰销轴线均平行于车辆纵向),B、C分别为转向主销BC与上、下横臂联接的球铰中心。在车辆横向垂直平面内,上、下横臂相对水平面的摆角分别用、表示,转向主销内倾角用0表示。转向传

双横臂悬架设计.doc
--5.7双横臂式悬架设计5.7.1双横臂悬架的结构与力学模型简化图5.7.1某货车的双横臂前悬架图5.7.1采用前置转向梯形的货车的前悬架。一根横梁用作副车架,通过螺栓连接在车架下方。弹簧、限位块、减振器和两对横臂支承在横梁这一“受力中心”上。只有横向稳定杆、转向器、转向直拉杆和下横臂的拉杆固定在车架纵梁上。拉杆前部支承着一个具有纵向弹性的橡胶支座。该支座缓和带束轮胎的纵向刚度。双横臂式悬架的主要优点在于其运动规律的可设计性。根据横臂的相互位置,即角度和的大小,可定出侧倾中心和纵倾中