
生成机器学习模型的输入数据.pdf

梅雪****67


1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
生成机器学习模型的输入数据.pdf
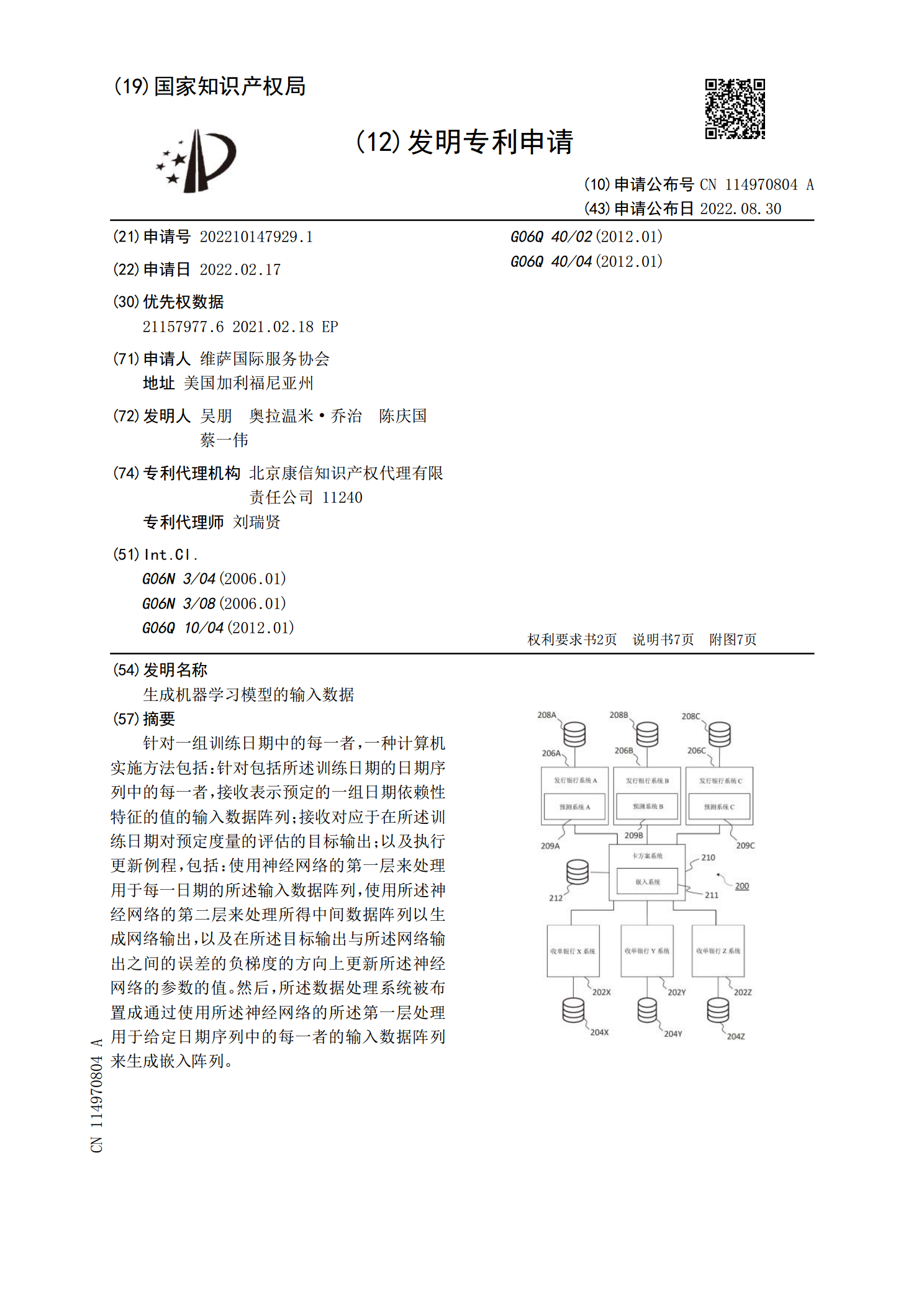
针对一组训练日期中的每一者,一种计算机实施方法包括:针对包括所述训练日期的日期序列中的每一者,接收表示预定的一组日期依赖性特征的值的输入数据阵列;接收对应于在所述训练日期对预定度量的评估的目标输出;以及执行更新例程,包括:使用神经网络的第一层来处理用于每一日期的所述输入数据阵列,使用所述神经网络的第二层来处理所得中间数据阵列以生成网络输出,以及在所述目标输出与所述网络输出之间的误差的负梯度的方向上更新所述神经网络的参数的值。然后,所述数据处理系统被布置成通过使用所述神经网络的所述第一层处理用于给定日期序列

输入数据生成系统、输入数据生成方法及输入数据生成程序.pdf
一实施方式所涉及的输入数据生成系统具备至少一个处理器,至少一个处理器至少接受确定与第1分子对应的分子图的第1分子图数据、确定与第2分子对应的分子图的第2分子图数据、及表示第1分子及第2分子的混合率的混合率数据的输入,至少组合第1分子图数据和第2分子图数据,生成合成分子图数据,将合成分子图数据变换为特征矢量,通过在特征矢量中反映混合率数据,生成机器学习用输入数据。

用于加固机器学习模型的学习输入预处理.pdf
提供了用于由一个或多个处理器在计算系统中保护机器学习模型的各种实施例。通过应用来自一个或多个机器学习模型的选定预处理操作的多个组合中的一个或更多个组合、用于加固所述一个或多个机器学习模型的数据集、一列预处理器以及选定数目的学习器,提供了针对对抗攻击而被保护的一个或多个加固的机器学习模型。

基于多模输入机器学习模型的外骨骼机器人步态规划方法研究.docx
基于多模输入机器学习模型的外骨骼机器人步态规划方法研究基于多模输入机器学习模型的外骨骼机器人步态规划方法研究摘要:外骨骼机器人作为辅助功能机器人在康复治疗和助力行走等方面具有重要的应用价值。在外骨骼机器人的控制中,步态规划是实现自然动作和适应性行走的关键。本文结合多模输入机器学习模型,提出了一种基于多模输入机器学习模型的外骨骼机器人步态规划方法。该方法通过融合传感器数据和运动模式识别,实现外骨骼机器人的主动控制和人机交互。通过实验证明了该方法的有效性和实用性。关键词:外骨骼机器人,步态规划,多模输入机器学
基于机器学习的终端风险评估模型的生成方法及其系统.pdf
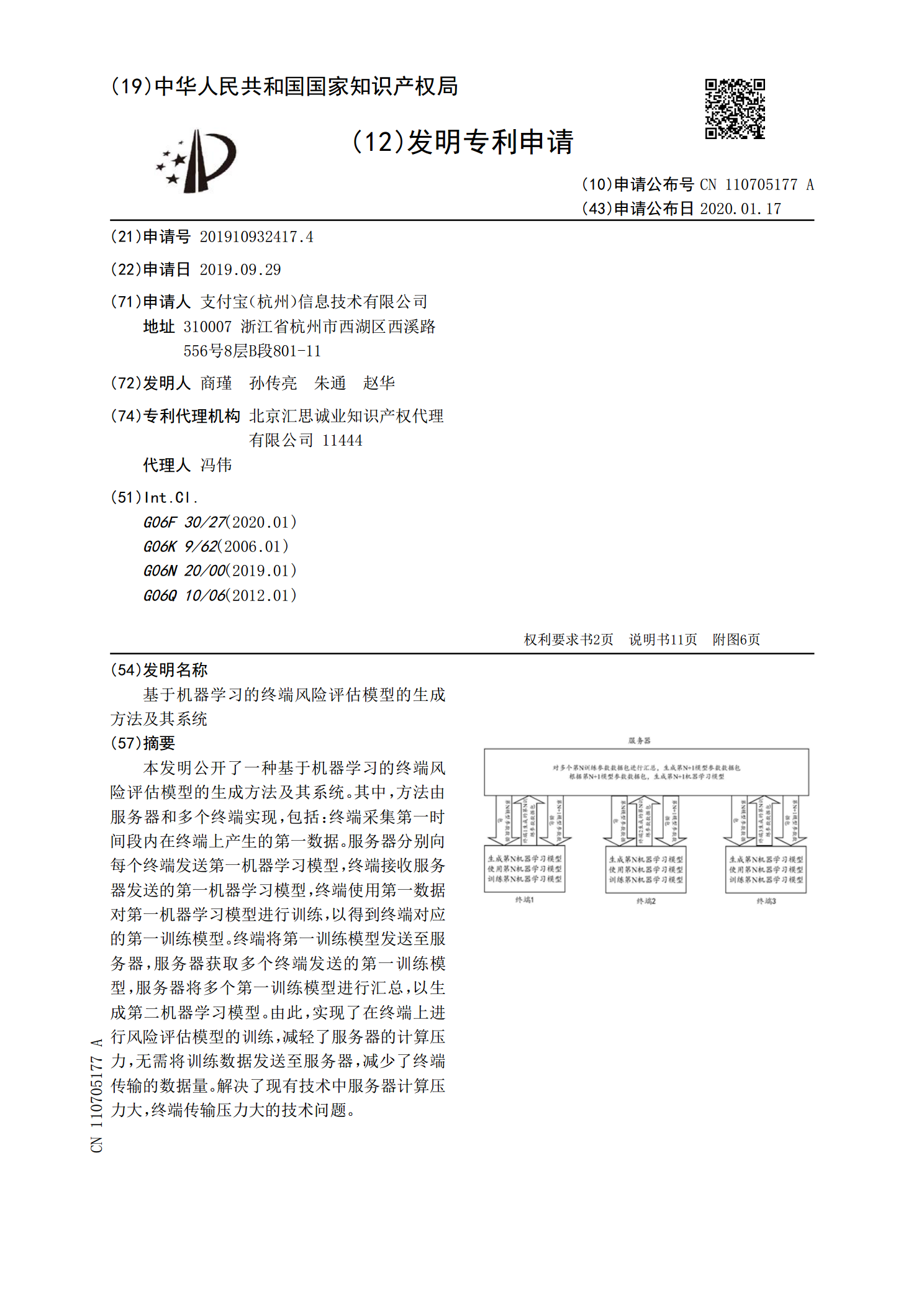
本发明公开了一种基于机器学习的终端风险评估模型的生成方法及其系统。其中,方法由服务器和多个终端实现,包括:终端采集第一时间段内在终端上产生的第一数据。服务器分别向每个终端发送第一机器学习模型,终端接收服务器发送的第一机器学习模型,终端使用第一数据对第一机器学习模型进行训练,以得到终端对应的第一训练模型。终端将第一训练模型发送至服务器,服务器获取多个终端发送的第一训练模型,服务器将多个第一训练模型进行汇总,以生成第二机器学习模型。由此,实现了在终端上进行风险评估模型的训练,减轻了服务器的计算压力,无需将训练