
一种单目视觉里程计目标位姿检测方法.pdf

春景****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种单目视觉里程计目标位姿检测方法.pdf
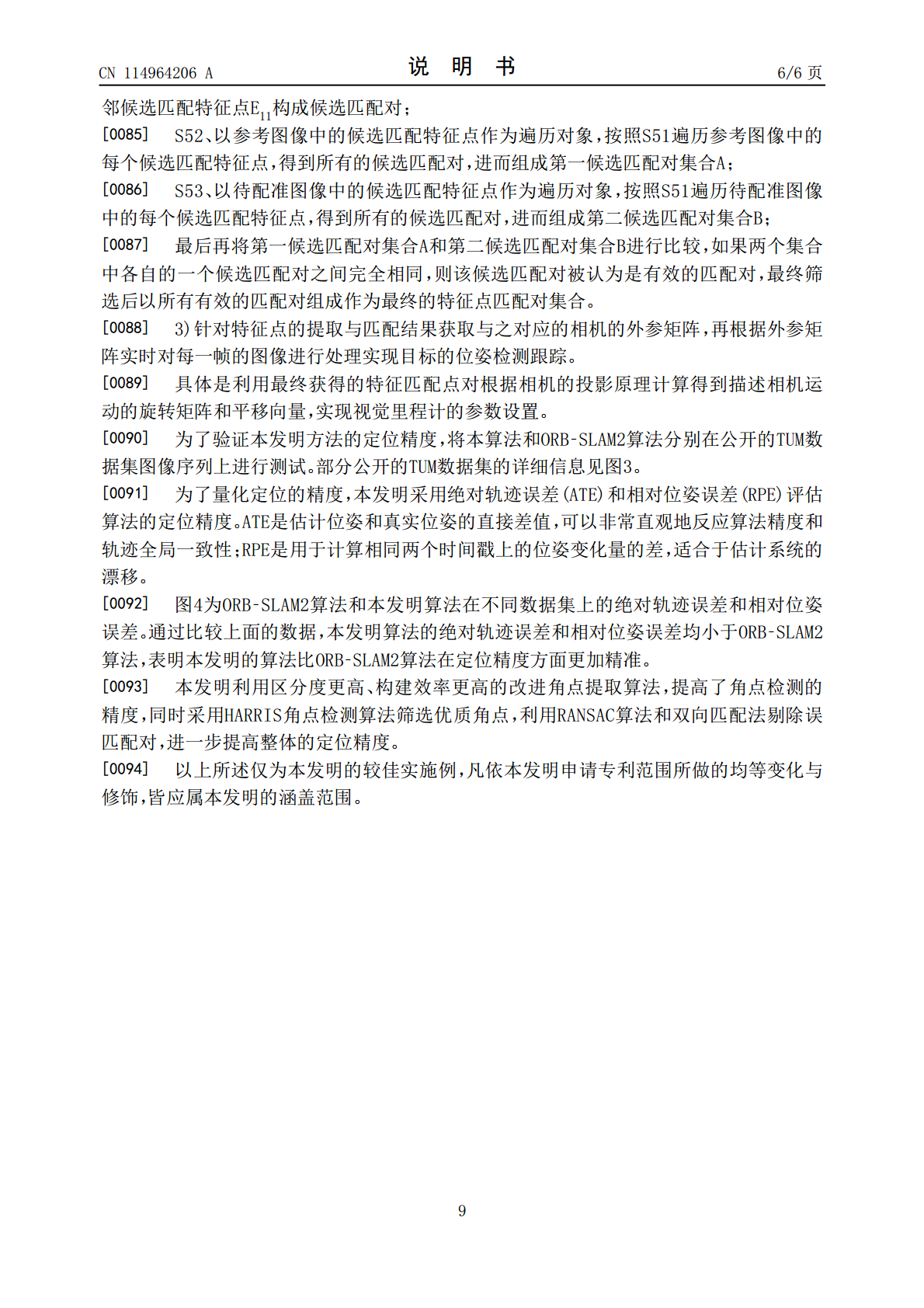
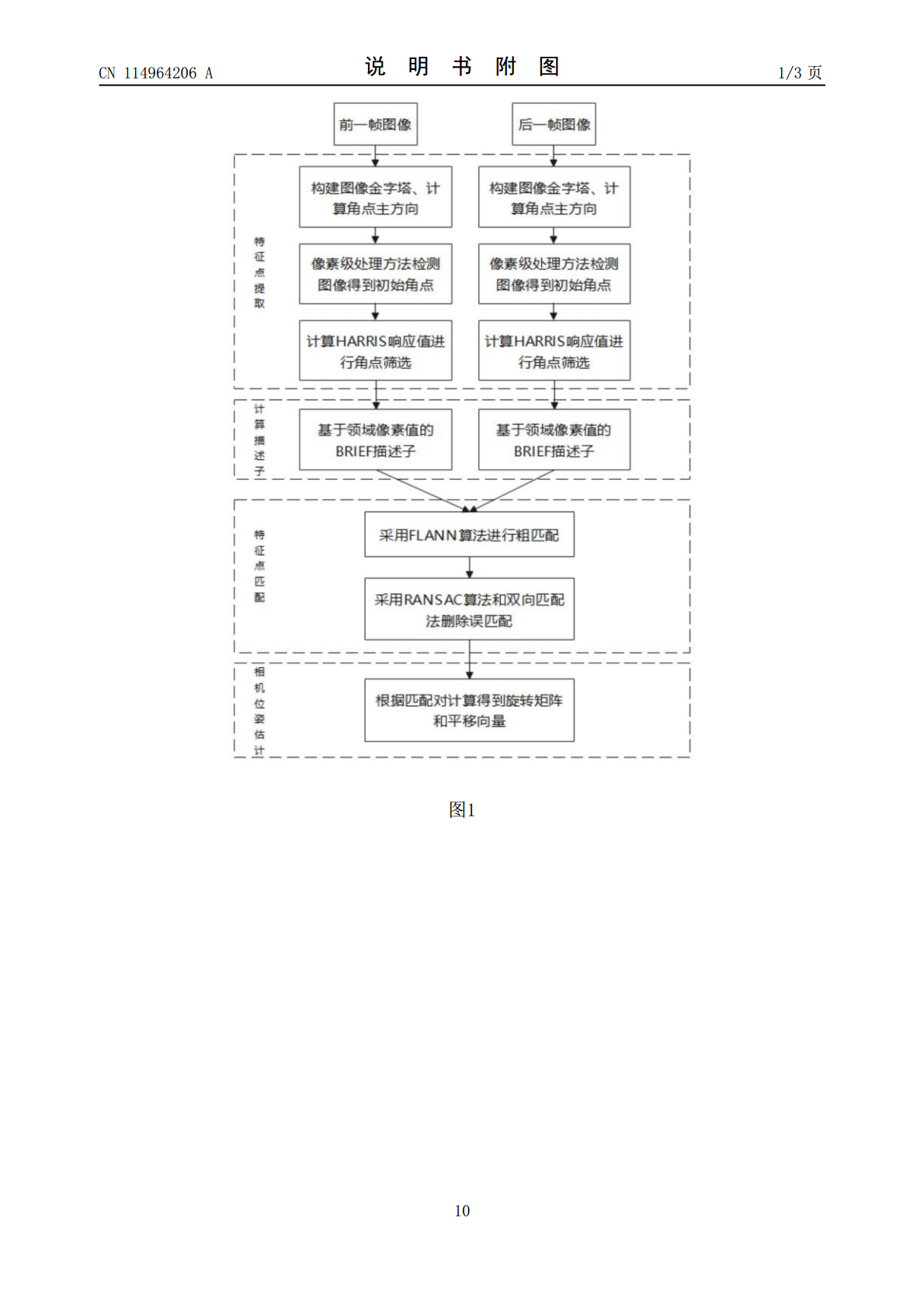
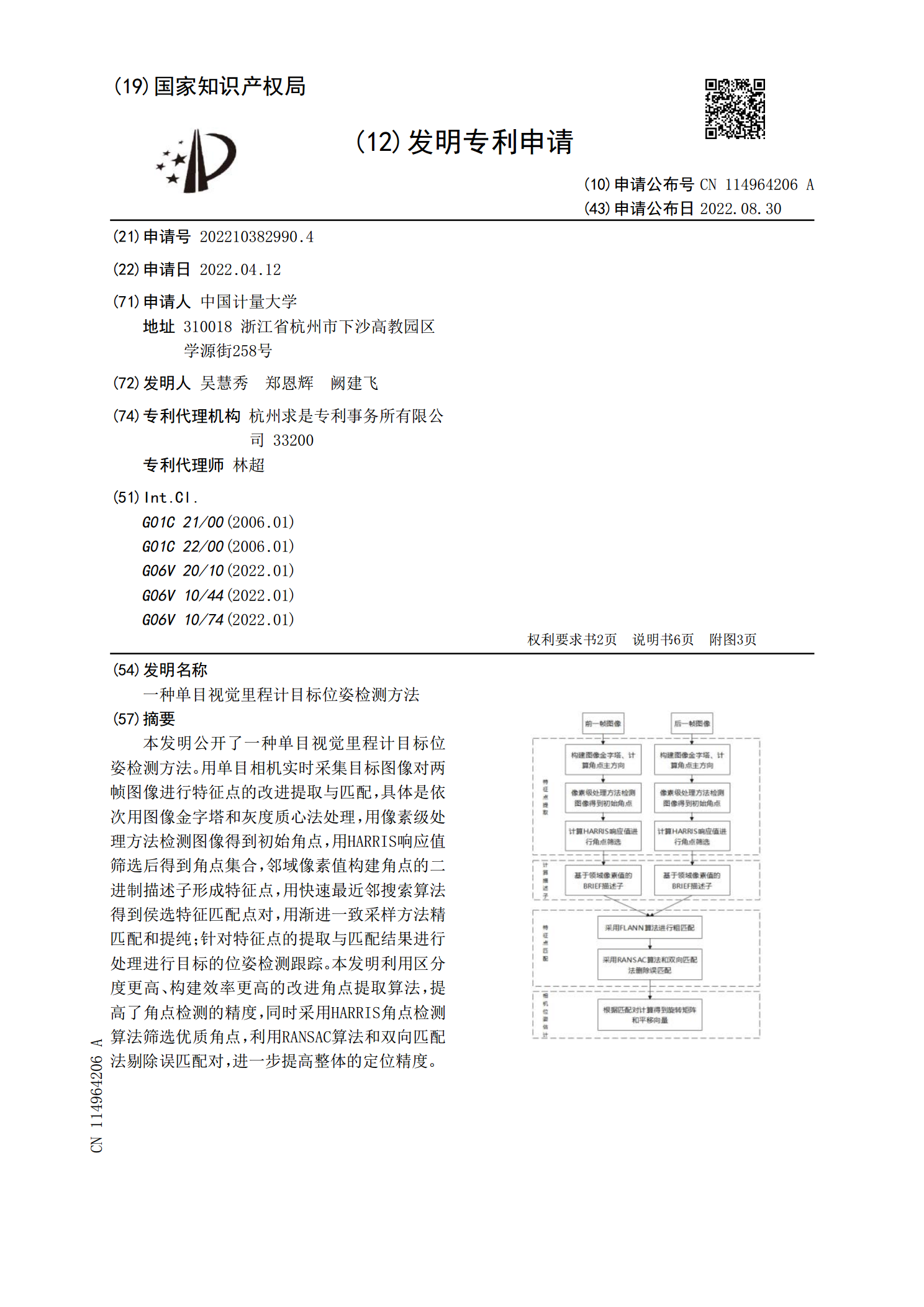
本发明公开了一种单目视觉里程计目标位姿检测方法。用单目相机实时采集目标图像对两帧图像进行特征点的改进提取与匹配,具体是依次用图像金字塔和灰度质心法处理,用像素级处理方法检测图像得到初始角点,用HARRIS响应值筛选后得到角点集合,邻域像素值构建角点的二进制描述子形成特征点,用快速最近邻搜索算法得到侯选特征匹配点对,用渐进一致采样方法精匹配和提纯;针对特征点的提取与匹配结果进行处理进行目标的位姿检测跟踪。本发明利用区分度更高、构建效率更高的改进角点提取算法,提高了角点检测的精度,同时采用HARRIS角点检测
基于深度学习的单目视觉里程计位姿优化与误差修正方法.pdf
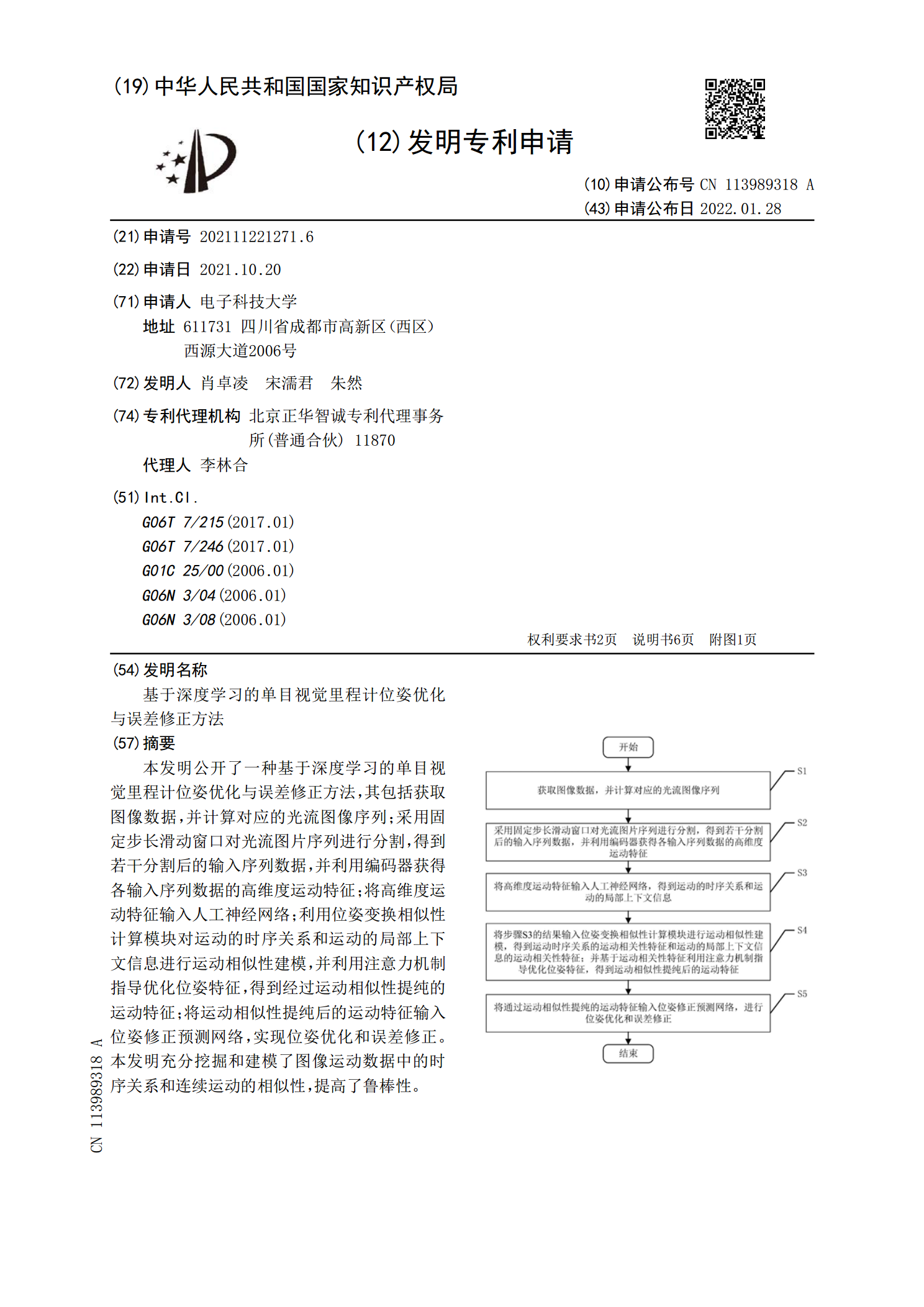
本发明公开了一种基于深度学习的单目视觉里程计位姿优化与误差修正方法,其包括获取图像数据,并计算对应的光流图像序列;采用固定步长滑动窗口对光流图片序列进行分割,得到若干分割后的输入序列数据,并利用编码器获得各输入序列数据的高维度运动特征;将高维度运动特征输入人工神经网络;利用位姿变换相似性计算模块对运动的时序关系和运动的局部上下文信息进行运动相似性建模,并利用注意力机制指导优化位姿特征,得到经过运动相似性提纯的运动特征;将运动相似性提纯后的运动特征输入位姿修正预测网络,实现位姿优化和误差修正。本发明充分挖掘
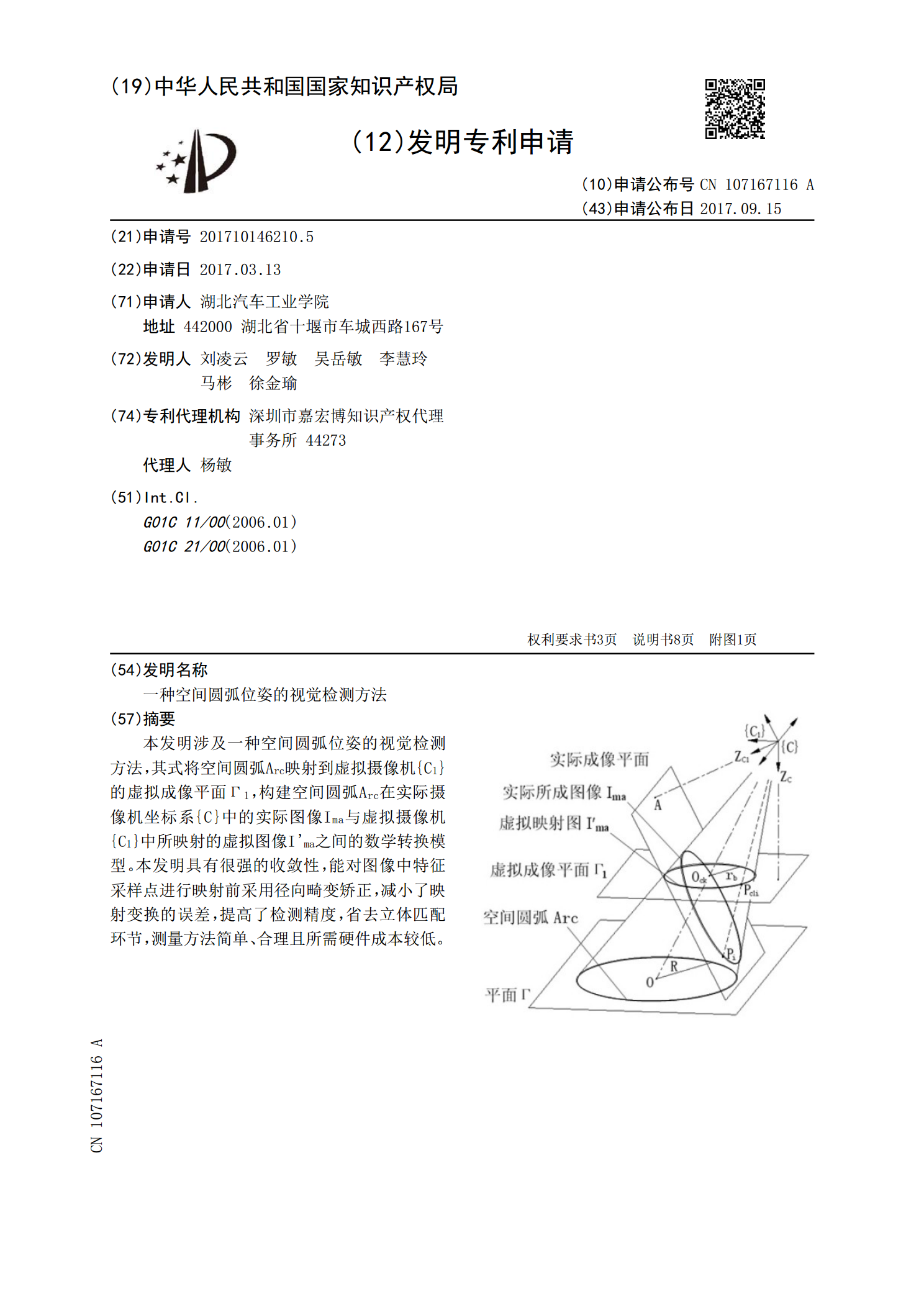
一种空间圆弧位姿的视觉检测方法.pdf
本发明涉及一种空间圆弧位姿的视觉检测方法,其式将空间圆弧A<base:Sub>rc</base:Sub>映射到虚拟摄像机{C<base:Sub>1</base:Sub>}的虚拟成像平面Γ<base:Sub>1</base:Sub>,构建空间圆弧A<base:Sub>rc</base:Sub>在实际摄像机坐标系{C}中的实际图像I<base:Sub>ma</base:Sub>与虚拟摄像机{C<base:Sub>1</base:Sub>}中所映射的虚拟图像I<base:Sub>ma</base:Sub>之间的
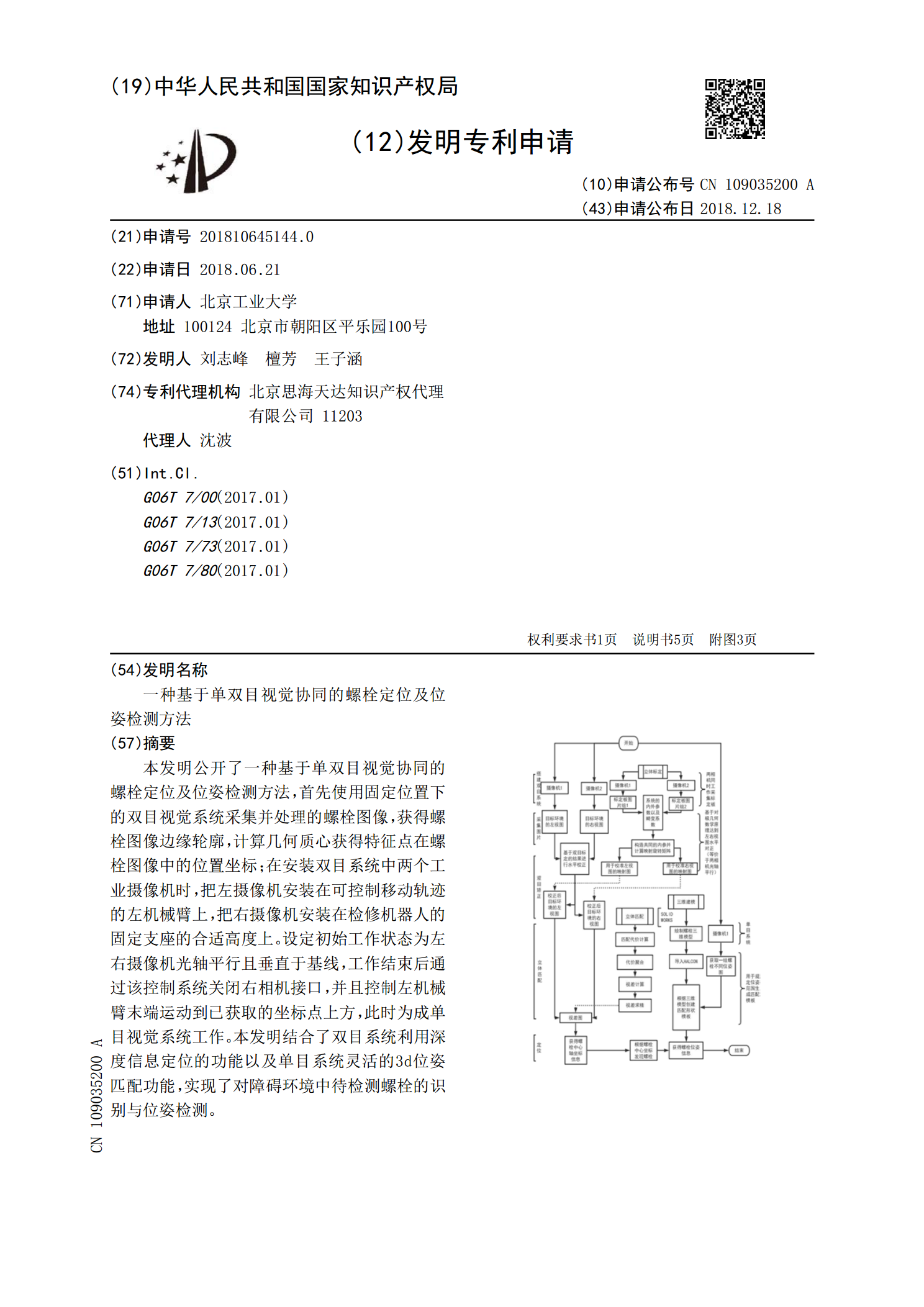
一种基于单双目视觉协同的螺栓定位及位姿检测方法.pdf
本发明公开了一种基于单双目视觉协同的螺栓定位及位姿检测方法,首先使用固定位置下的双目视觉系统采集并处理的螺栓图像,获得螺栓图像边缘轮廓,计算几何质心获得特征点在螺栓图像中的位置坐标;在安装双目系统中两个工业摄像机时,把左摄像机安装在可控制移动轨迹的左机械臂上,把右摄像机安装在检修机器人的固定支座的合适高度上。设定初始工作状态为左右摄像机光轴平行且垂直于基线,工作结束后通过该控制系统关闭右相机接口,并且控制左机械臂末端运动到已获取的坐标点上方,此时为成单目视觉系统工作。本发明结合了双目系统利用深度信息定位的
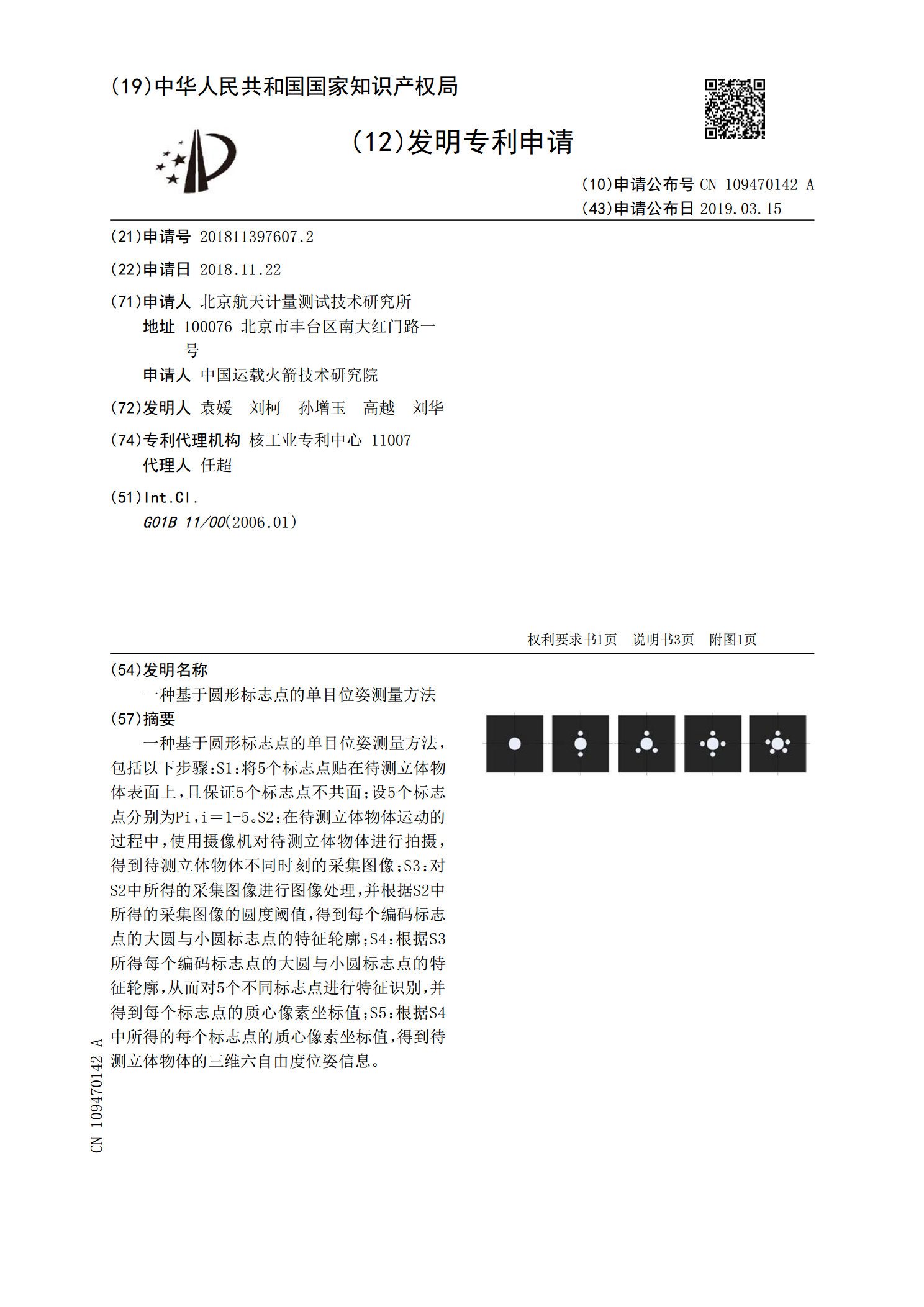
一种基于圆形标志点的单目位姿测量方法.pdf
一种基于圆形标志点的单目位姿测量方法,包括以下步骤:S1:将5个标志点贴在待测立体物体表面上,且保证5个标志点不共面;设5个标志点分别为Pi,i=1‑5。S2:在待测立体物体运动的过程中,使用摄像机对待测立体物体进行拍摄,得到待测立体物体不同时刻的采集图像;S3:对S2中所得的采集图像进行图像处理,并根据S2中所得的采集图像的圆度阈值,得到每个编码标志点的大圆与小圆标志点的特征轮廓;S4:根据S3所得每个编码标志点的大圆与小圆标志点的特征轮廓,从而对5个不同标志点进行特征识别,并得到每个标志点的质心像素坐