
一种基于离线聚类的无监督对比学习的多目标跟踪方法.pdf

书生****萌哒

1/10

2/10
3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于离线聚类的无监督对比学习的多目标跟踪方法.pdf
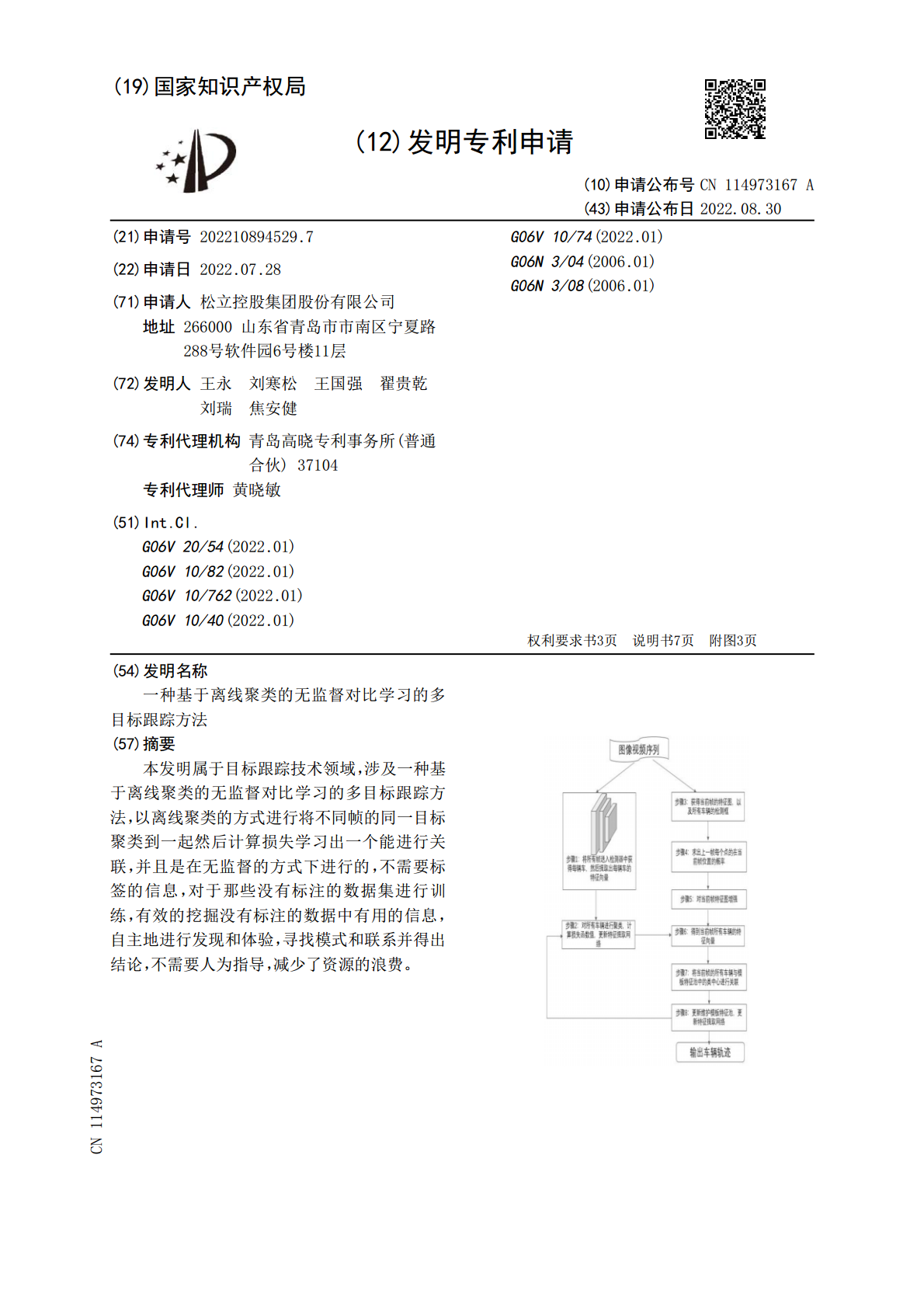
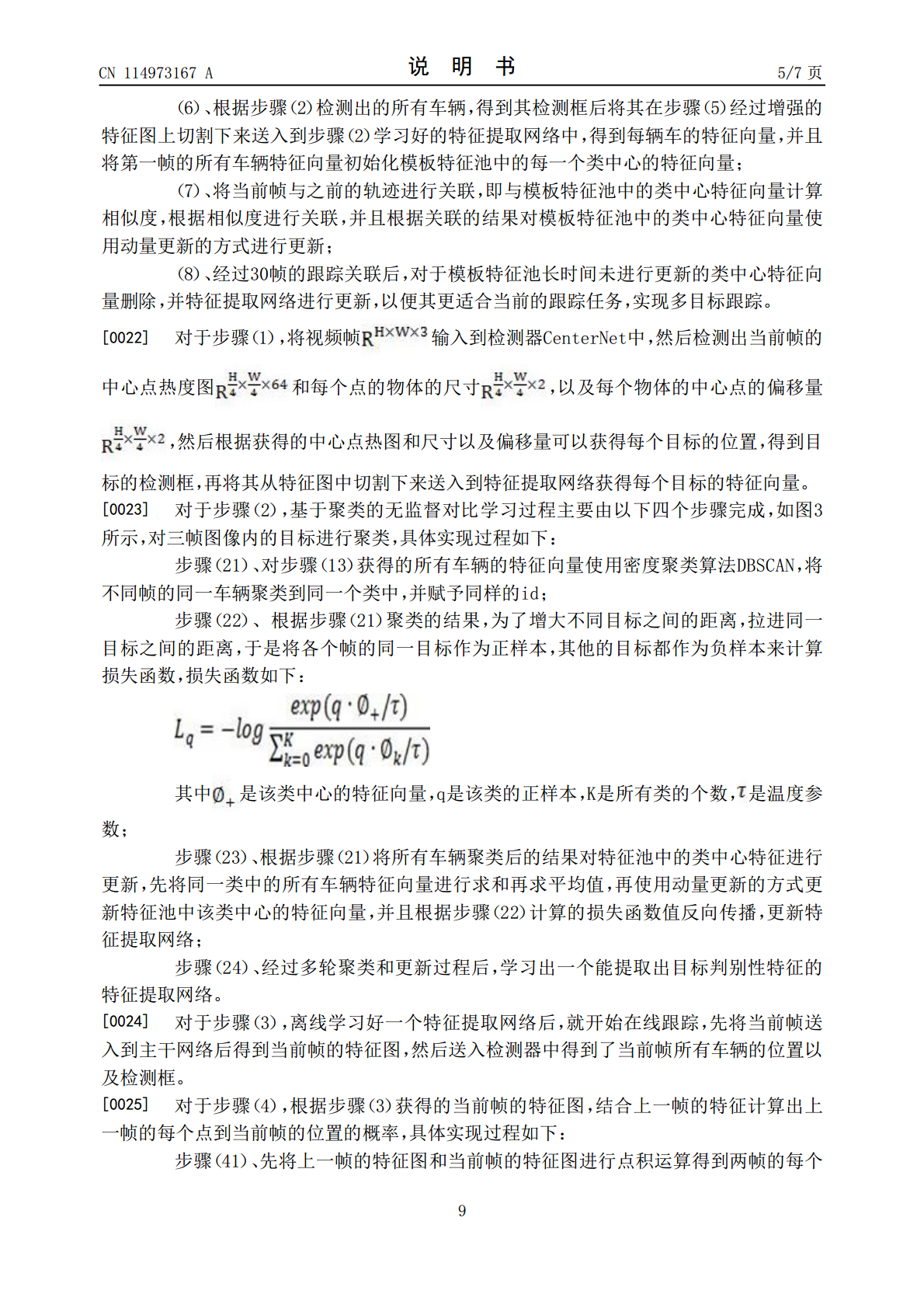
本发明属于目标跟踪技术领域,涉及一种基于离线聚类的无监督对比学习的多目标跟踪方法,以离线聚类的方式进行将不同帧的同一目标聚类到一起然后计算损失学习出一个能进行关联,并且是在无监督的方式下进行的,不需要标签的信息,对于那些没有标注的数据集进行训练,有效的挖掘没有标注的数据中有用的信息,自主地进行发现和体验,寻找模式和联系并得出结论,不需要人为指导,减少了资源的浪费。
基于对比学习的无监督视觉目标跟踪方法及系统.pdf
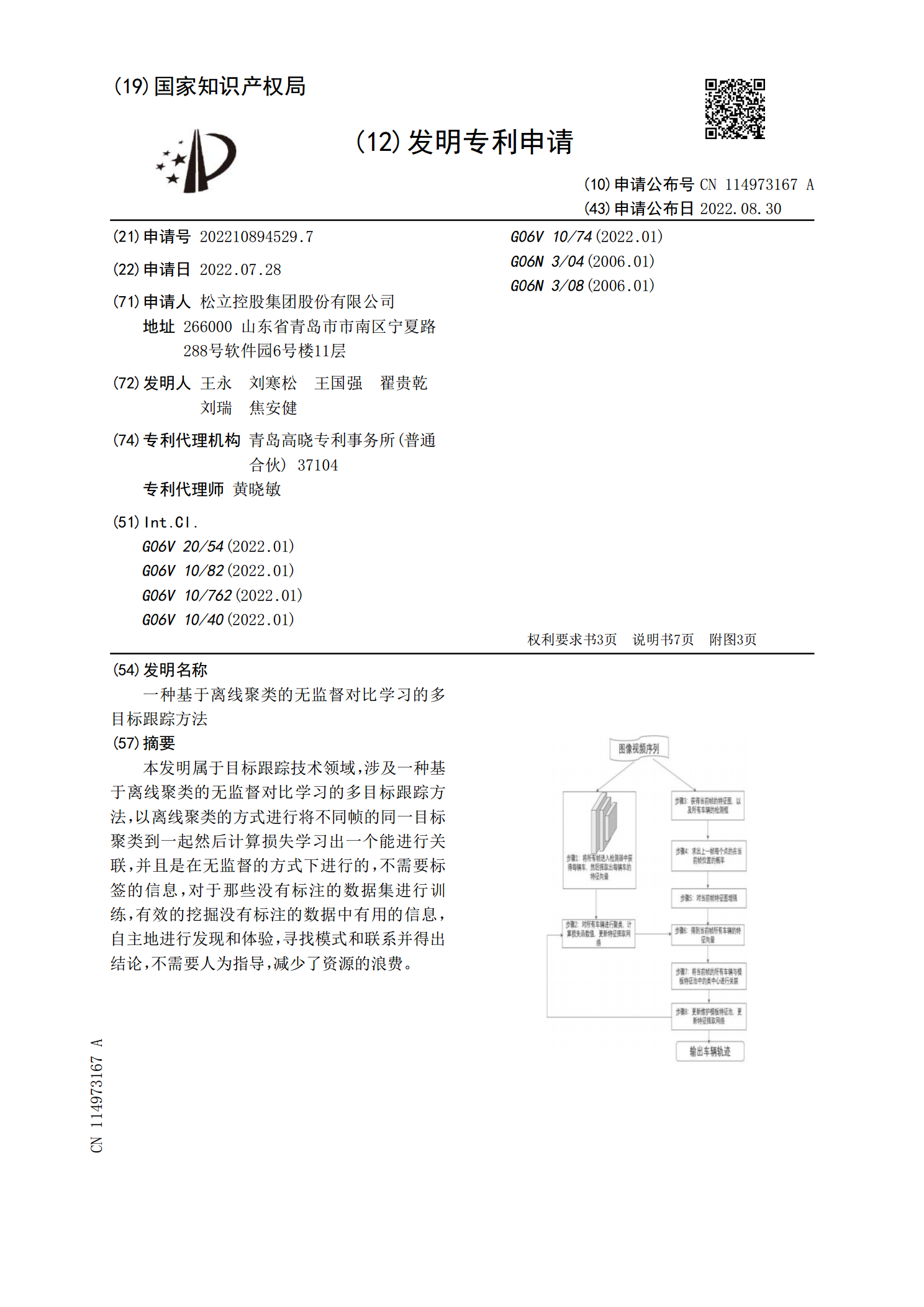
一种基于对比学习的无监督视觉目标跟踪方法及系统,包括:训练阶段和测试阶段,训练阶段包括:生成训练数据、构建视觉跟踪模型、设计组合损失函数以及训练模型,在测试阶段将测试的跟踪视频序列输入到训练后的视觉跟踪模型中,即对于每个待测帧,按上一帧预测得到的跟踪框作为中心进行裁剪得到输入图像,结合上一帧以及上一帧的搜索响应,得到待测帧的搜索响应,响应中最大值的位置表示跟踪目标所在位置,并结合所对应的尺度得到最终预测的跟踪框,从而完成该帧中目标的跟踪。本发明不仅能让模型进行无监督训练,还能让模型学到不同数据增强下搜索响

一种基于无监督宽度学习的高光谱图像聚类方法.pdf
本发明的一种基于无监督宽度学习的高光谱图像聚类方法,首先,为保留原始高光谱图像的本征流形结,利用图正则稀疏自动编码器微调输入到映射特征和映射特征到增量节点的权重;接着,无监督宽度学习的模型目标函数由图正则项和连接权重的l2范数项构成,并通过求解广义特征值分解问题,得到无监督宽度学习的模型权重以及无监督宽度学习的输出;最后,利用谱聚类得到聚类结果。
基于无监督机器学习的磁异常矢量聚类反演方法.pdf
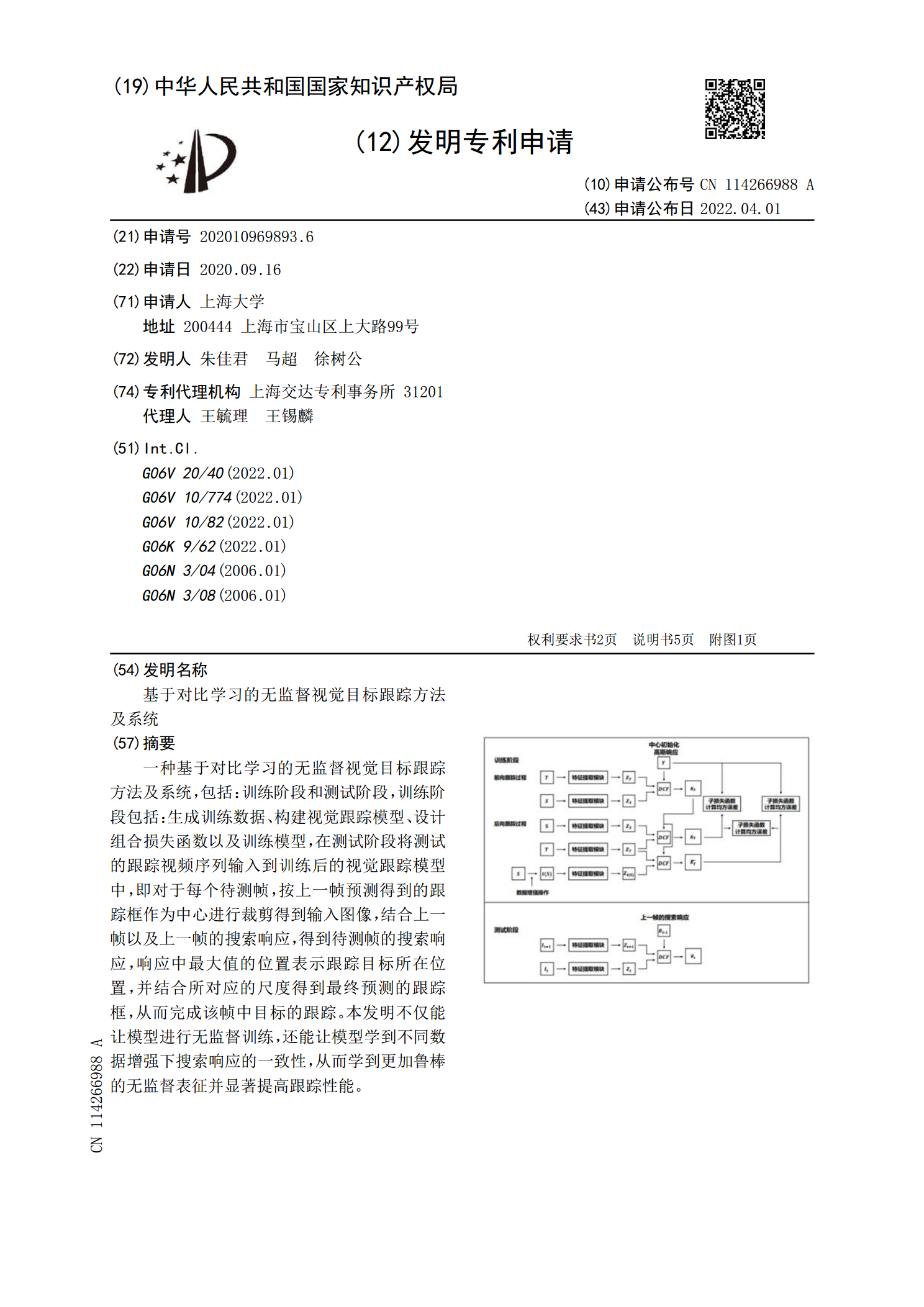
本申请实施例提供一种基于无监督机器学习的磁异常矢量聚类反演方法,属于地球物理勘测技术领域。该方法包括:将一组磁异常数据表示为公式1,磁化强度矢量反演为公式2;反演模型的磁化强度m与M个反演模型的三个分量之间的关系为公式3,M个反演模型沿x、y、z轴的三个分量为公式4;第j个反演模型的磁化方向单位矢量为公式5:通过求解目标函数<base:Imagehe=@23@wi=@19@file=@ZY_1.JPG@imgContent=@drawing@imgFormat=@JPEG@orientation=@por

一种基于密度的无监督聚类算法.docx
一种基于密度的无监督聚类算法密度聚类算法,即基于密度的聚类算法,是一种基于数据点之间“密度”的相似性度量进行聚类的无监督聚类算法。与传统的聚类算法不同,密度聚类算法不需要预先规定聚类簇的个数,而是通过一定的密度阈值将数据点分为几个不同密度的区域,并在这些区域内寻找局部密度极大值作为聚类的中心点,进而完成聚类。常见的密度聚类算法包括DBSCAN、OPTICS、HDBSCAN等。本文将着重介绍DBSCAN算法及其优缺点。一、DBSCAN算法DBSCAN,全称Density-BasedSpatialCluste