
一种岸-舰双基地高频地波雷达运动补偿方法.pdf

邻家****ng

1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种岸-舰双基地高频地波雷达运动补偿方法.pdf
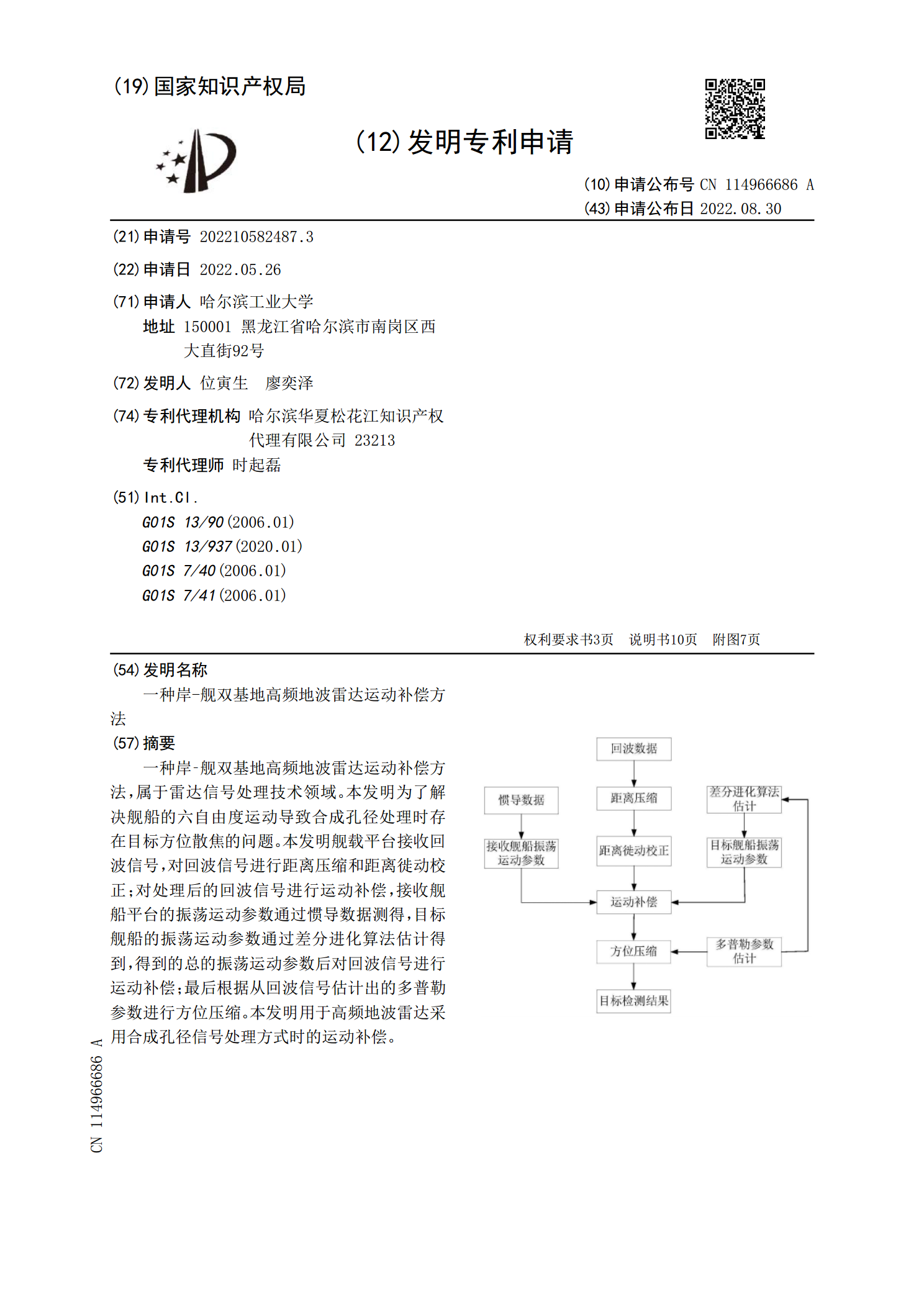
一种岸‑舰双基地高频地波雷达运动补偿方法,属于雷达信号处理技术领域。本发明为了解决舰船的六自由度运动导致合成孔径处理时存在目标方位散焦的问题。本发明舰载平台接收回波信号,对回波信号进行距离压缩和距离徙动校正;对处理后的回波信号进行运动补偿,接收舰船平台的振荡运动参数通过惯导数据测得,目标舰船的振荡运动参数通过差分进化算法估计得到,得到的总的振荡运动参数后对回波信号进行运动补偿;最后根据从回波信号估计出的多普勒参数进行方位压缩。本发明用于高频地波雷达采用合成孔径信号处理方式时的运动补偿。

岸舰双多基地地波超视距雷达机动目标的检测的开题报告.docx
岸舰双多基地地波超视距雷达机动目标的检测的开题报告题目:岸舰双多基地地波超视距雷达机动目标的检测一、研究背景及意义岸舰双多基地地波超视距雷达(OverTheHorizonRadar,OTHR)是一种有着长信号传输距离和高频率使用能力的雷达,能够监测到远距离的目标,同时也是一种高效、灵敏的雷达探测系统。由于其探测距离超高,因此对于机动目标的检测也变得越来越重要。机动目标指的是具有一定的动态参数并可以变化目标属性的目标,一般包括超音速飞行器、低可探测机型、反射面积小等目标。在现代信息化战争中,机动目标对于侦察

岸-舰双基地波超视距雷达图像域海杂波抑制方法.docx
岸-舰双基地波超视距雷达图像域海杂波抑制方法引言舰船作为国家海洋战略的重要组成部分,在海上实施海上战略任务时,需要有一定的海洋监测能力。其中,雷达技术被广泛应用于海军的海上监测任务中。海上监测需要在大范围的海洋航行中收集海洋信息,包括海面气象、海面流向、海洋温度等海洋参数,以判断海况、预测海况变化,为安全导航和作战决策提供依据。其中,海基波超视距雷达(OAWR)可提供视距范围内目标的精确测量,从而为海上任务的实施提供了精确的信息支持。然而,在海上雷达信号传输过程中,由于海洋复杂的天气和海况变化,海洋上存在

岸-舰双基地波超视距雷达直达波抑制方法及性能分析.docx
岸-舰双基地波超视距雷达直达波抑制方法及性能分析岸-舰双基地波超视距雷达直达波抑制方法及性能分析摘要:本文针对岸-舰双基地波超视距雷达工作中直达波对目标探测造成的干扰问题,提出了一种直达波抑制方法,即利用延迟多普勒波束形成技术结合自适应线性滤波器实现直达波的消除。本文在对该方法进行理论分析的基础上,通过模拟和实验结果的对比,验证了该方法的有效性和可行性。关键词:岸-舰双基地波超视距雷达,直达波,延迟多普勒波束形成,自适应线性滤波器,抑制一、绪论岸-舰双基地波超视距雷达是一种应用广泛的雷达系统,主要用于海上

一种高频地波雷达形成浪场的方法.pdf
本发明提供一种高频地波雷达形成浪场的方法,是一种从高频地波雷达回波提取有效浪高的方法,并通过该浪高反演算法得到浪场。该浪高提取算法是根据雷达回波多普勒谱中一阶峰与二阶峰的比值获取的,所得到的有效浪高可以通过MUSIC(多重信号分类)算法估计方位角,从而得到浪高的方位信息。当所提取的有效浪高同时包含方位角信息和距离信息时,就可以得到雷达在探测海域范围内的浪高分布,即浪场的形成。初始的浪场,通过后续的处理:替换、插值和平滑,可得到最终的浪场。本发明所涉及的浪场形成算法,不仅适用于窄波束雷达系统,还适用于紧凑阵