
一种基于时空图与空域聚合Transformer网络的轨迹预测方法.pdf

一只****呀淑

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于时空图与空域聚合Transformer网络的轨迹预测方法.pdf
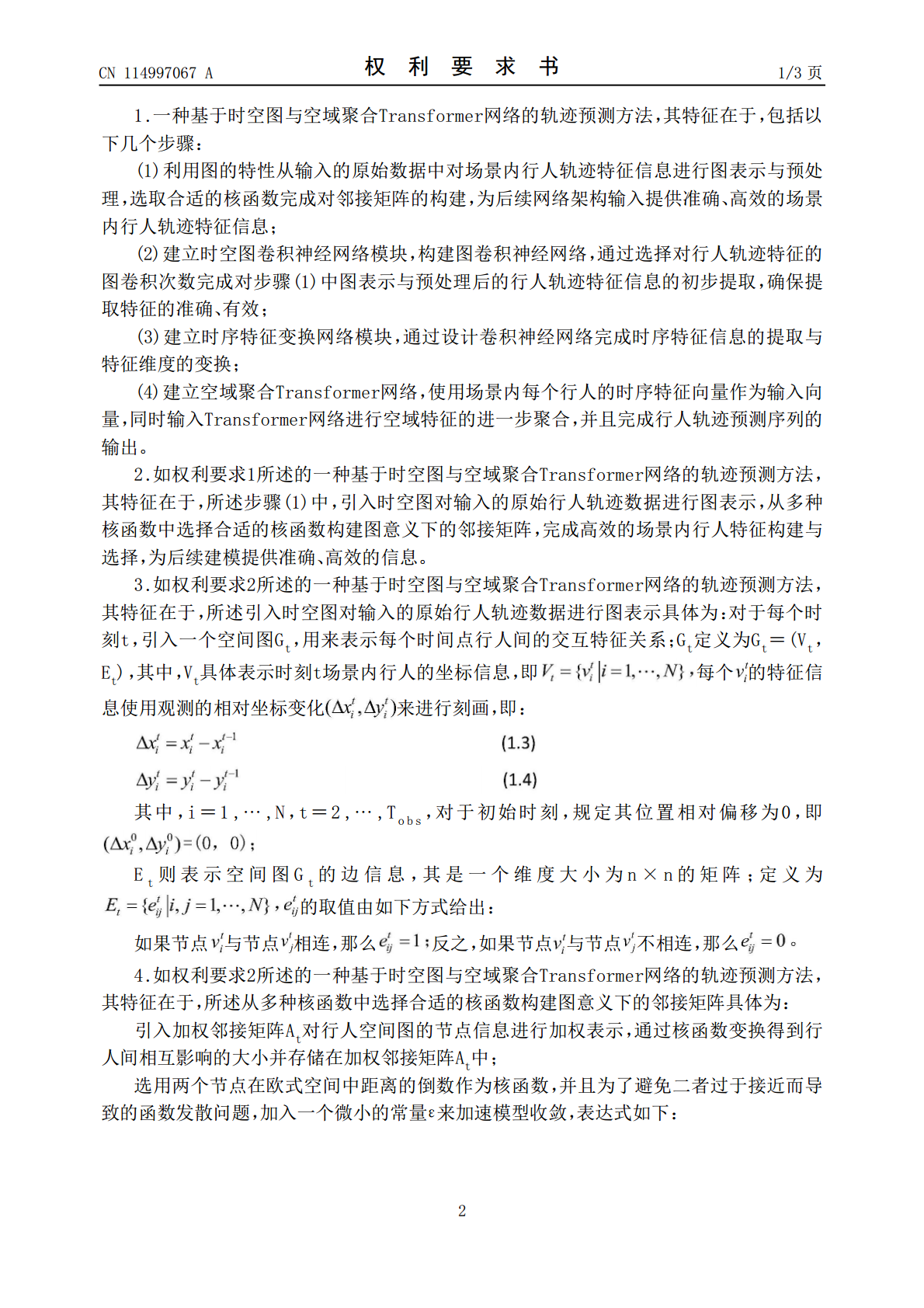
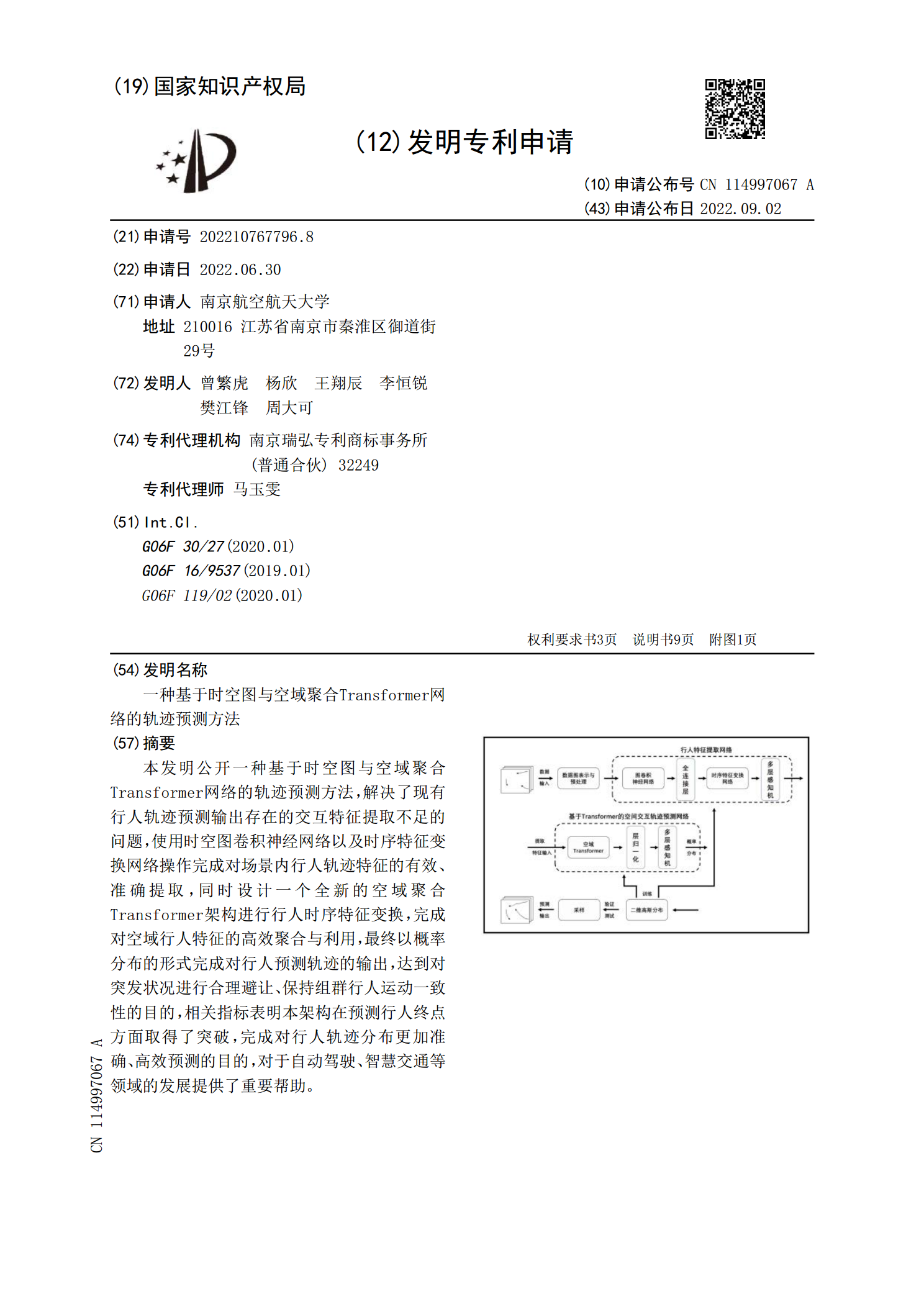
本发明公开一种基于时空图与空域聚合Transformer网络的轨迹预测方法,解决了现有行人轨迹预测输出存在的交互特征提取不足的问题,使用时空图卷积神经网络以及时序特征变换网络操作完成对场景内行人轨迹特征的有效、准确提取,同时设计一个全新的空域聚合Transformer架构进行行人时序特征变换,完成对空域行人特征的高效聚合与利用,最终以概率分布的形式完成对行人预测轨迹的输出,达到对突发状况进行合理避让、保持组群行人运动一致性的目的,相关指标表明本架构在预测行人终点方面取得了突破,完成对行人轨迹分布更加准确、
一种基于注意力时空图卷积网络的空域交通流量预测方法.pdf
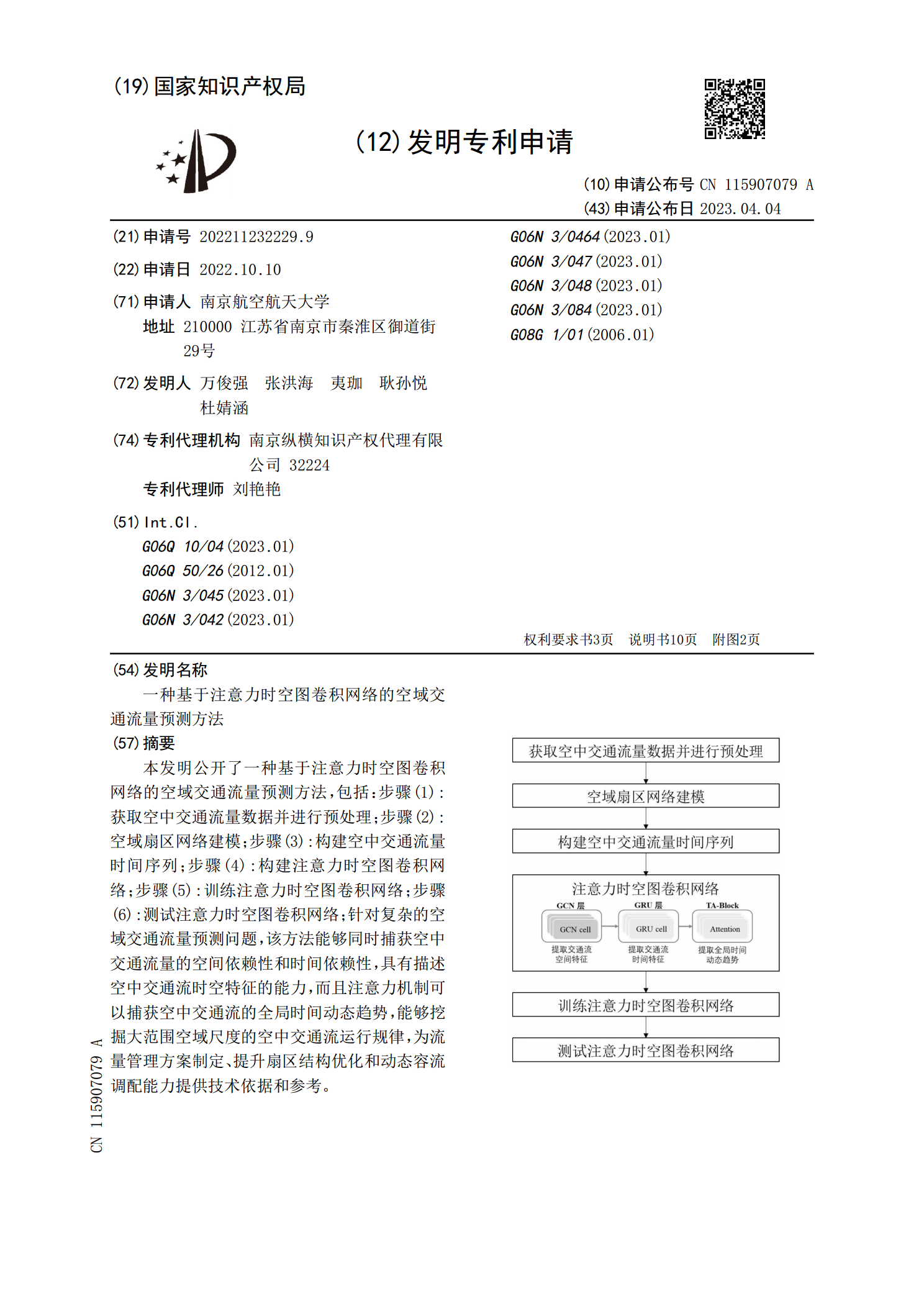
本发明公开了一种基于注意力时空图卷积网络的空域交通流量预测方法,包括:步骤(1):获取空中交通流量数据并进行预处理;步骤(2):空域扇区网络建模;步骤(3):构建空中交通流量时间序列;步骤(4):构建注意力时空图卷积网络;步骤(5):训练注意力时空图卷积网络;步骤(6):测试注意力时空图卷积网络;针对复杂的空域交通流量预测问题,该方法能够同时捕获空中交通流量的空间依赖性和时间依赖性,具有描述空中交通流时空特征的能力,而且注意力机制可以捕获空中交通流的全局时间动态趋势,能够挖掘大范围空域尺度的空中交通流运行

基于Transformer的出租车轨迹预测方法研究.docx
基于Transformer的出租车轨迹预测方法研究目录一、内容简述................................................21.1背景与意义...........................................21.2研究目标与问题定义...................................31.3文献综述.............................................5二、相关工作..............
一种基于Transformer的动态异构网络链路预测方法.pdf
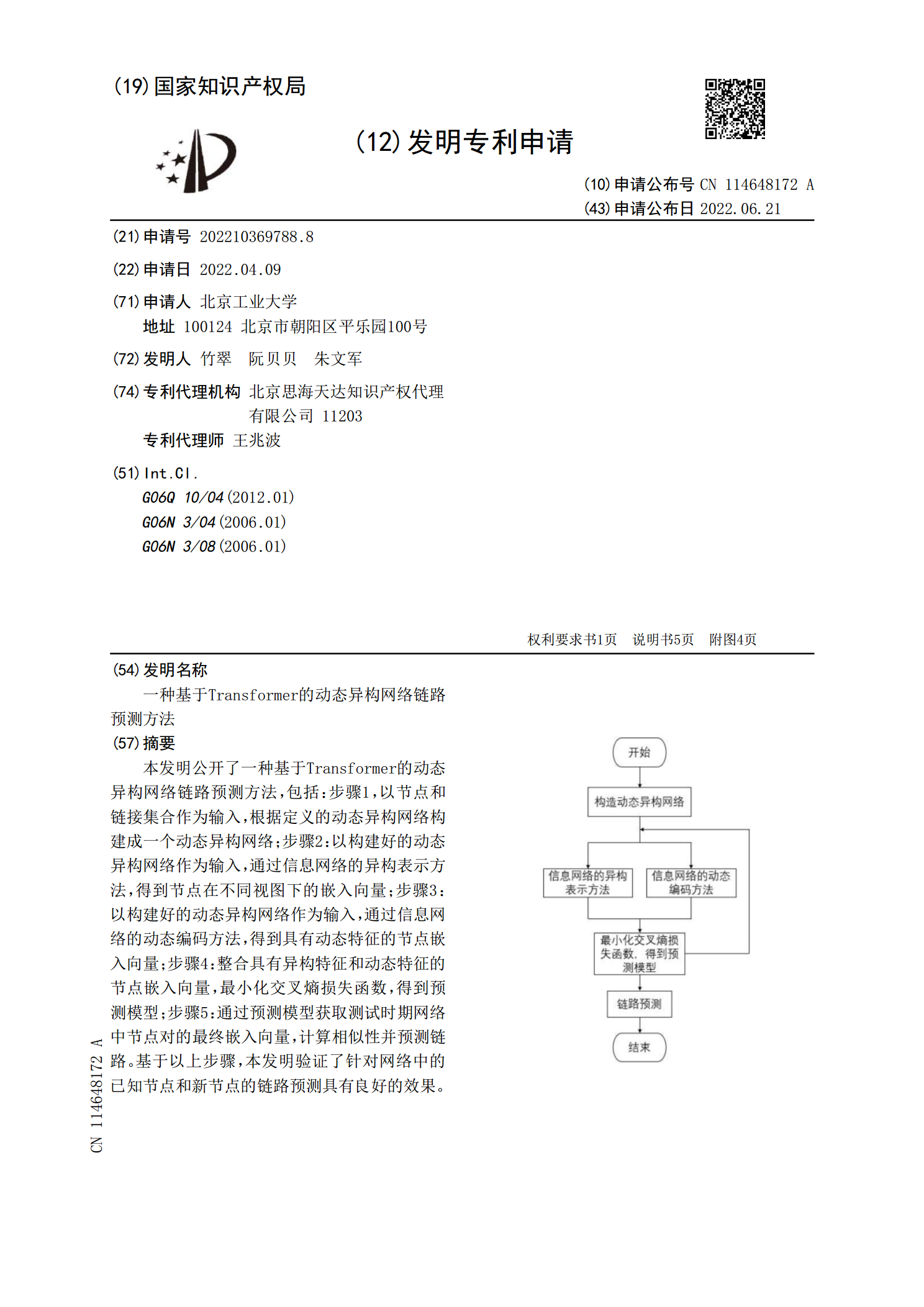
本发明公开了一种基于Transformer的动态异构网络链路预测方法,包括:步骤1,以节点和链接集合作为输入,根据定义的动态异构网络构建成一个动态异构网络;步骤2:以构建好的动态异构网络作为输入,通过信息网络的异构表示方法,得到节点在不同视图下的嵌入向量;步骤3:以构建好的动态异构网络作为输入,通过信息网络的动态编码方法,得到具有动态特征的节点嵌入向量;步骤4:整合具有异构特征和动态特征的节点嵌入向量,最小化交叉熵损失函数,得到预测模型;步骤5:通过预测模型获取测试时期网络中节点对的最终嵌入向量,计算相似

LSTGHP:基于分层时空图的异构代理轨迹分布预测.docx
LSTGHP:基于分层时空图的异构代理轨迹分布预测LSTGHP:基于分层时空图的异构代理轨迹分布预测摘要:随着移动智能设备的普及和定位技术的发展,轨迹数据逐渐成为了人们研究移动行为的重要数据来源。在许多应用领域中,预测轨迹分布可以为决策制定和规划提供有价值的参考。本文提出了一种基于分层时空图的异构代理轨迹分布预测方法(LSTGHP),通过将轨迹数据映射到分层时空图上,综合考虑时间、空间和交通条件等因素,实现了对异构代理轨迹分布的精确预测。关键词:轨迹数据;分层时空图;异构代理;预测方法;精确预测引言:移动