
一种半全息阵列的快速成像方法.pdf

猫巷****盟主

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种半全息阵列的快速成像方法.pdf
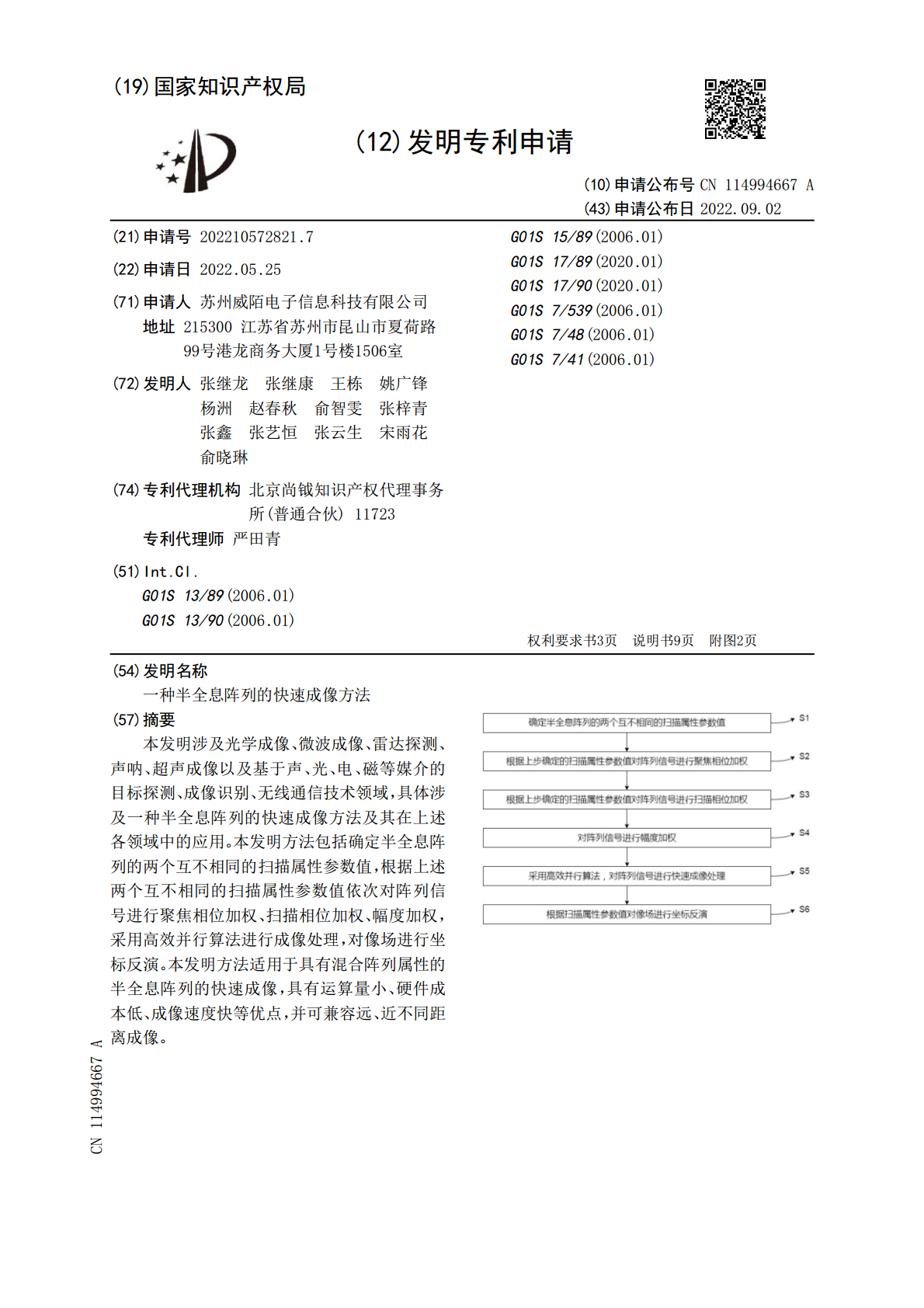
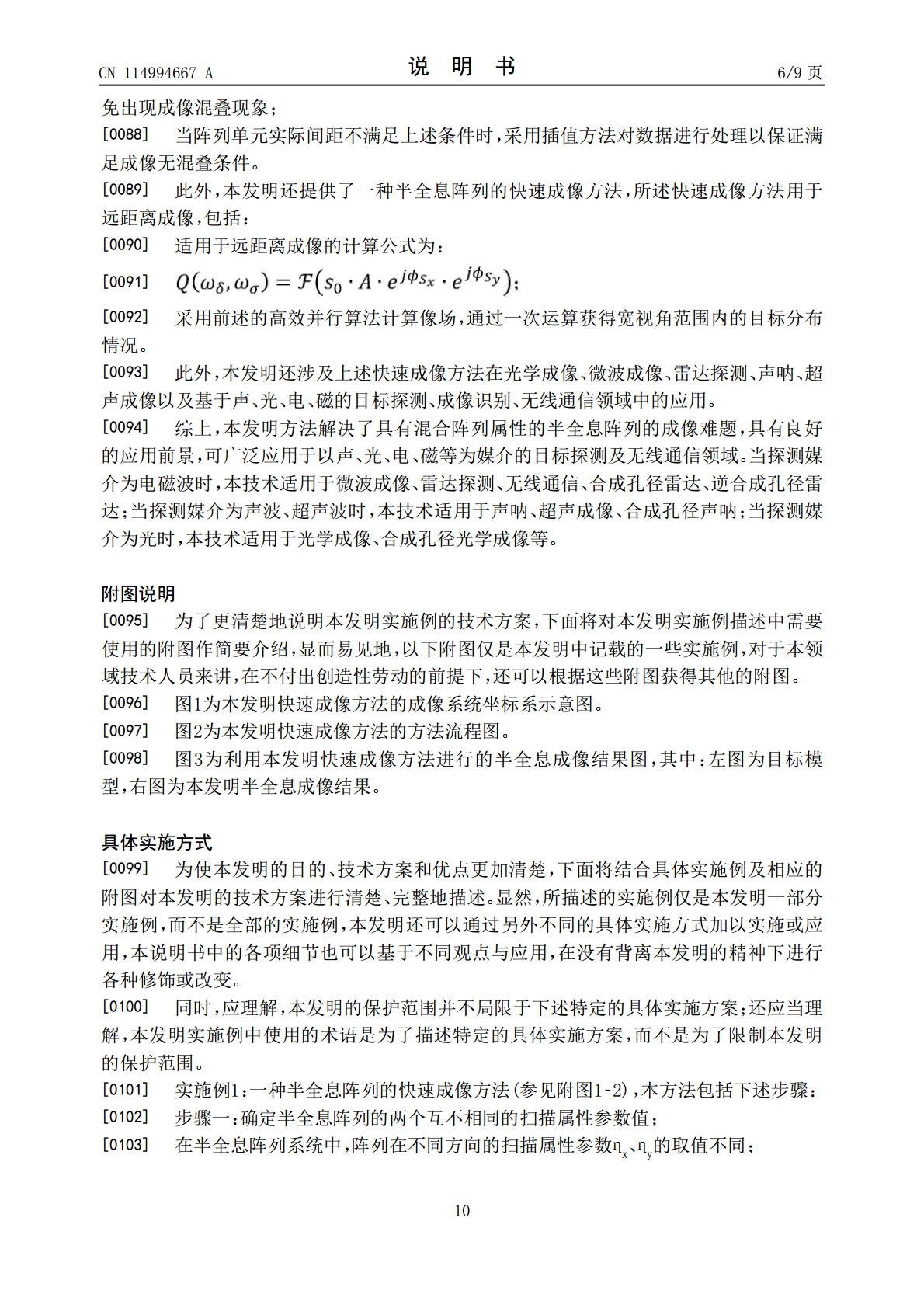
本发明涉及光学成像、微波成像、雷达探测、声呐、超声成像以及基于声、光、电、磁等媒介的目标探测、成像识别、无线通信技术领域,具体涉及一种半全息阵列的快速成像方法及其在上述各领域中的应用。本发明方法包括确定半全息阵列的两个互不相同的扫描属性参数值,根据上述两个互不相同的扫描属性参数值依次对阵列信号进行聚焦相位加权、扫描相位加权、幅度加权,采用高效并行算法进行成像处理,对像场进行坐标反演。本发明方法适用于具有混合阵列属性的半全息阵列的快速成像,具有运算量小、硬件成本低、成像速度快等优点,并可兼容远、近不同距离成

数字全息快速成像方法.pdf
本发明涉及光学成像、微波成像、雷达探测、无线通信、声呐、超声成像以及基于声、光、电等媒介的目标探测与成像识别技术领域,具体涉及一种数字全息快速成像方法及其在上述各领域中的应用。本发明方法基于透镜成像原理,结合电磁场理论,根据天线阵列接收到的目标信号,通过单元信号的幅度、相位加权,采用高效并行算法,获得目标对应的像场分布。本发明具有运算量小、硬件成本降低、成像速度快、可适用于远距离成像等优点,可广泛应用于光学成像、微波成像、雷达探测、声呐、超声成像以及声、光、电等为媒介的目标探测、成像识别、无线通信领域。
曲面阵列快速成像方法.pdf
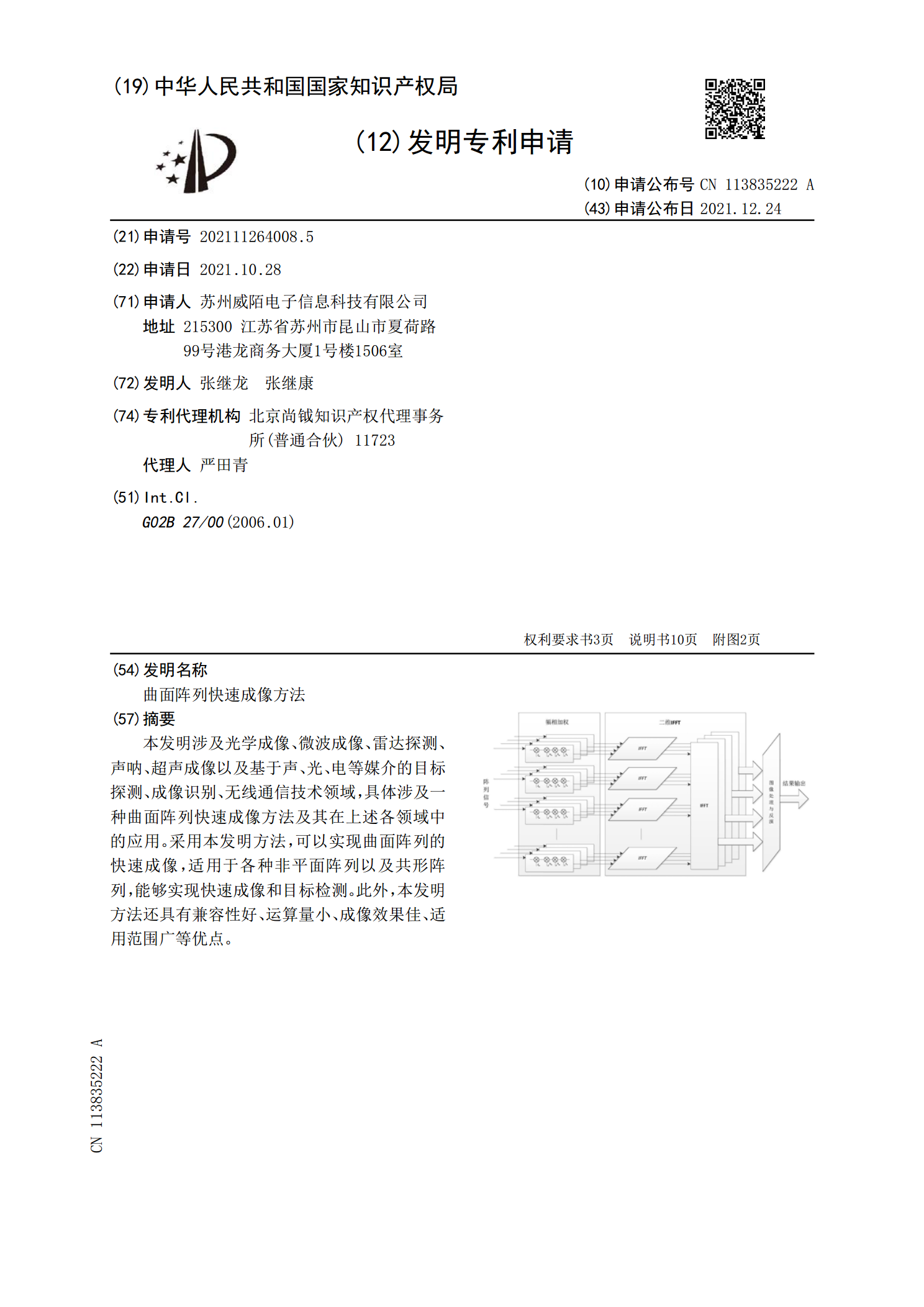
本发明涉及光学成像、微波成像、雷达探测、声呐、超声成像以及基于声、光、电等媒介的目标探测、成像识别、无线通信技术领域,具体涉及一种曲面阵列快速成像方法及其在上述各领域中的应用。采用本发明方法,可以实现曲面阵列的快速成像,适用于各种非平面阵列以及共形阵列,能够实现快速成像和目标检测。此外,本发明方法还具有兼容性好、运算量小、成像效果佳、适用范围广等优点。
阵列快速成像方法及其应用.pdf
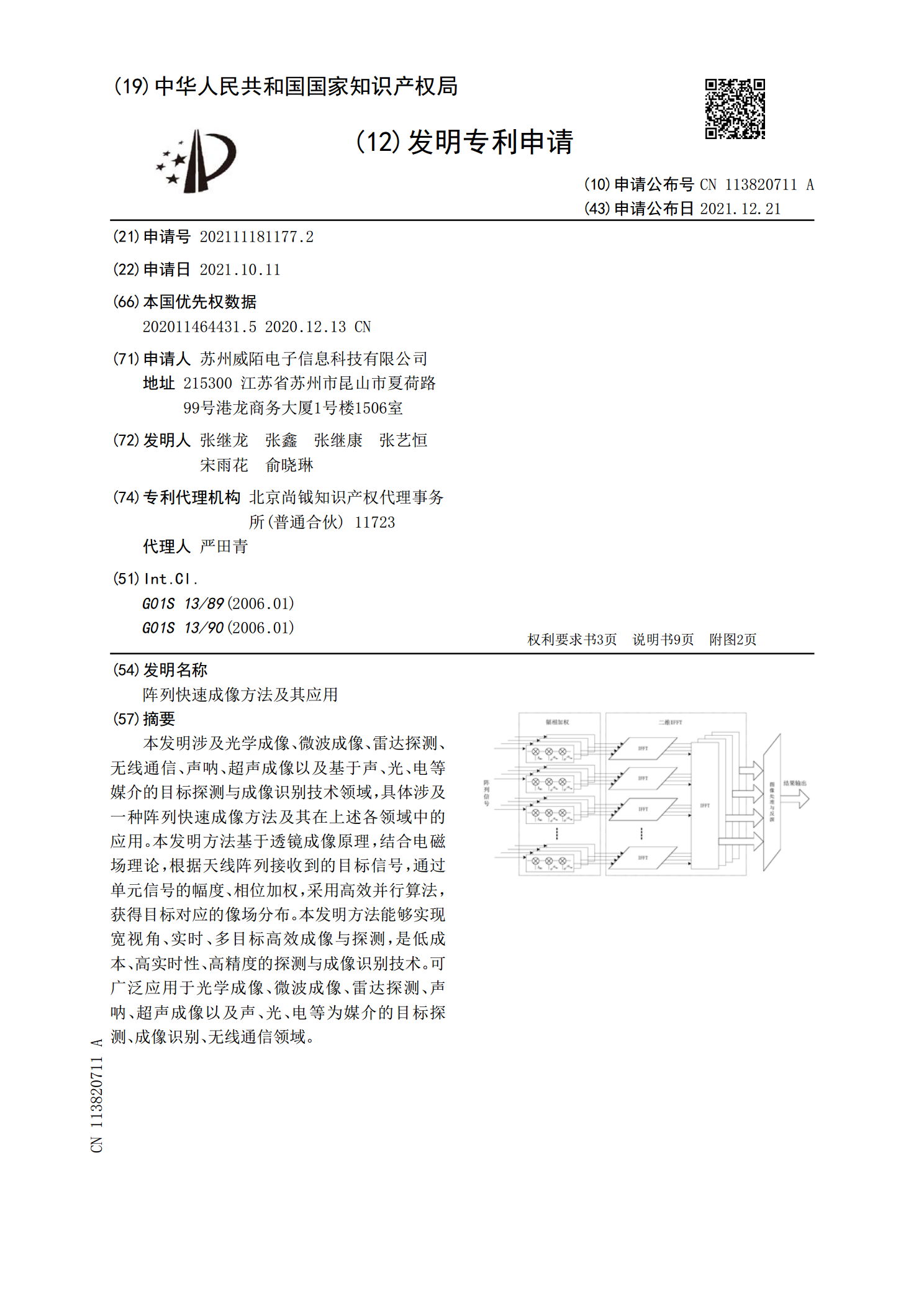
本发明涉及光学成像、微波成像、雷达探测、无线通信、声呐、超声成像以及基于声、光、电等媒介的目标探测与成像识别技术领域,具体涉及一种阵列快速成像方法及其在上述各领域中的应用。本发明方法基于透镜成像原理,结合电磁场理论,根据天线阵列接收到的目标信号,通过单元信号的幅度、相位加权,采用高效并行算法,获得目标对应的像场分布。本发明方法能够实现宽视角、实时、多目标高效成像与探测,是低成本、高实时性、高精度的探测与成像识别技术。可广泛应用于光学成像、微波成像、雷达探测、声呐、超声成像以及声、光、电等为媒介的目标探测、
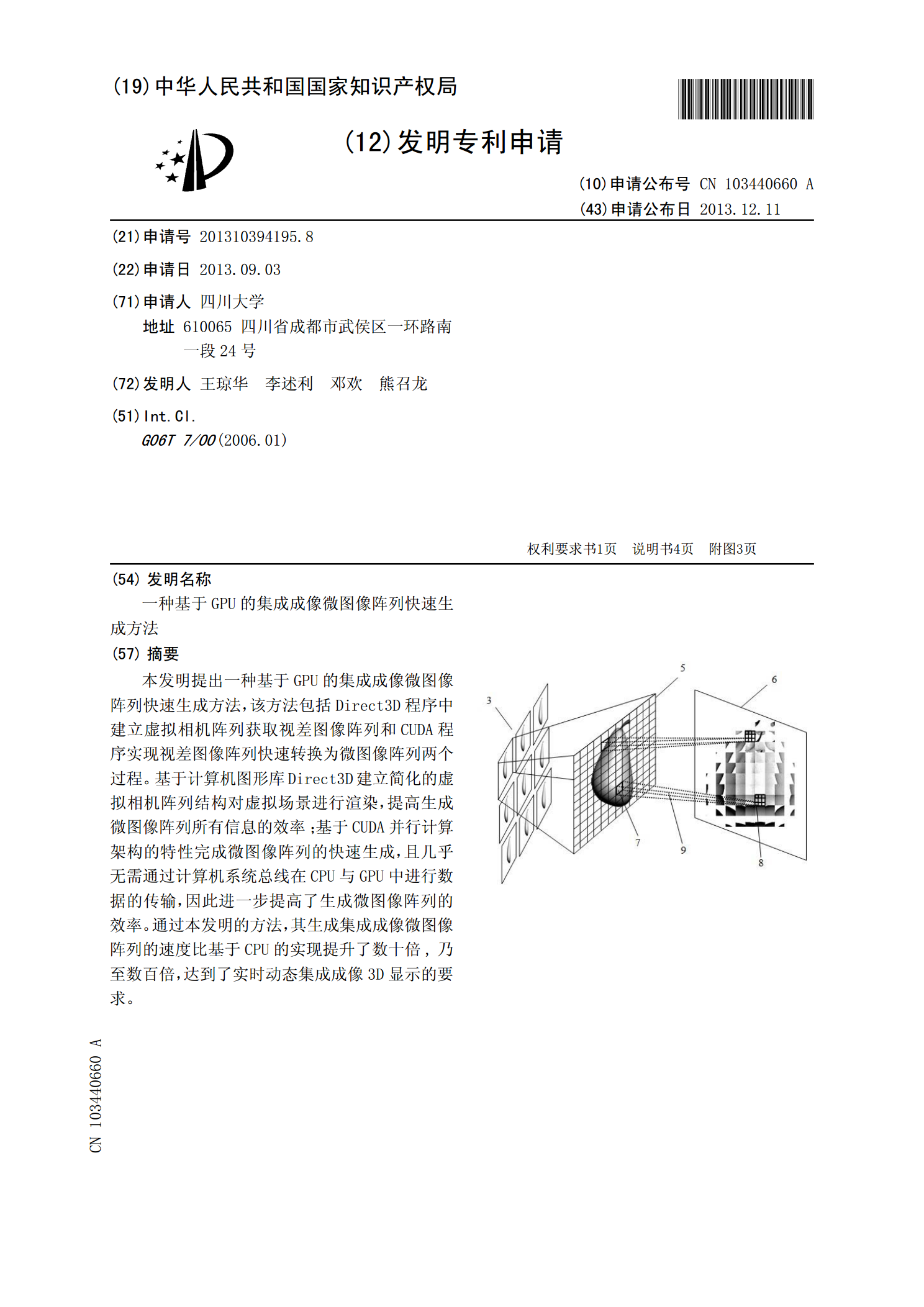
一种基于GPU的集成成像微图像阵列快速生成方法.pdf
本发明提出一种基于GPU的集成成像微图像阵列快速生成方法,该方法包括Direct3D程序中建立虚拟相机阵列获取视差图像阵列和CUDA程序实现视差图像阵列快速转换为微图像阵列两个过程。基于计算机图形库Direct3D建立简化的虚拟相机阵列结构对虚拟场景进行渲染,提高生成微图像阵列所有信息的效率;基于CUDA并行计算架构的特性完成微图像阵列的快速生成,且几乎无需通过计算机系统总线在CPU与GPU中进行数据的传输,因此进一步提高了生成微图像阵列的效率。通过本发明的方法,其生成集成成像微图像阵列的速度比基于CPU