
基于改进遗传算法的智能小车路径规划方法.pdf

书生****22

1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于改进遗传算法的智能小车路径规划方法.pdf
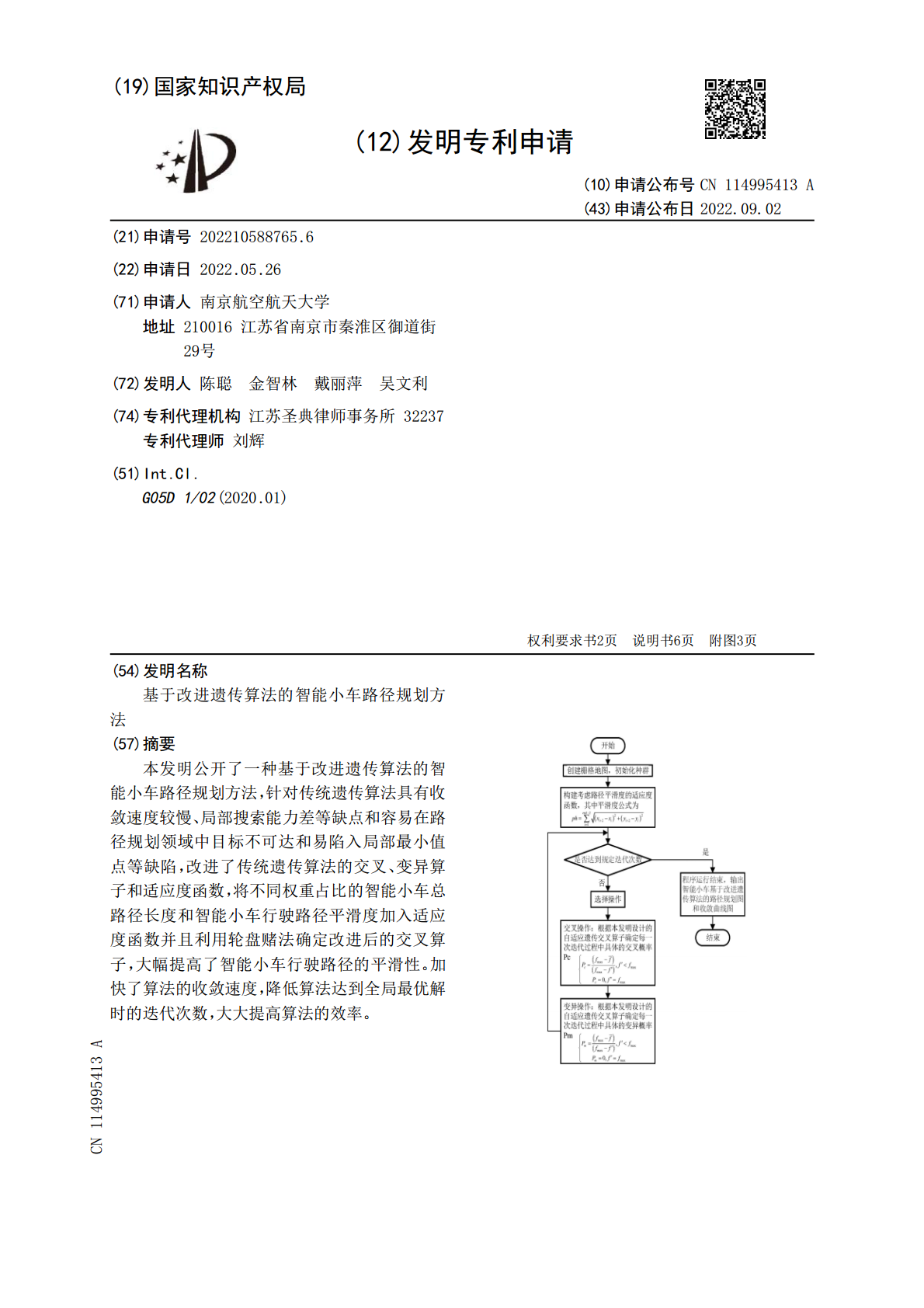
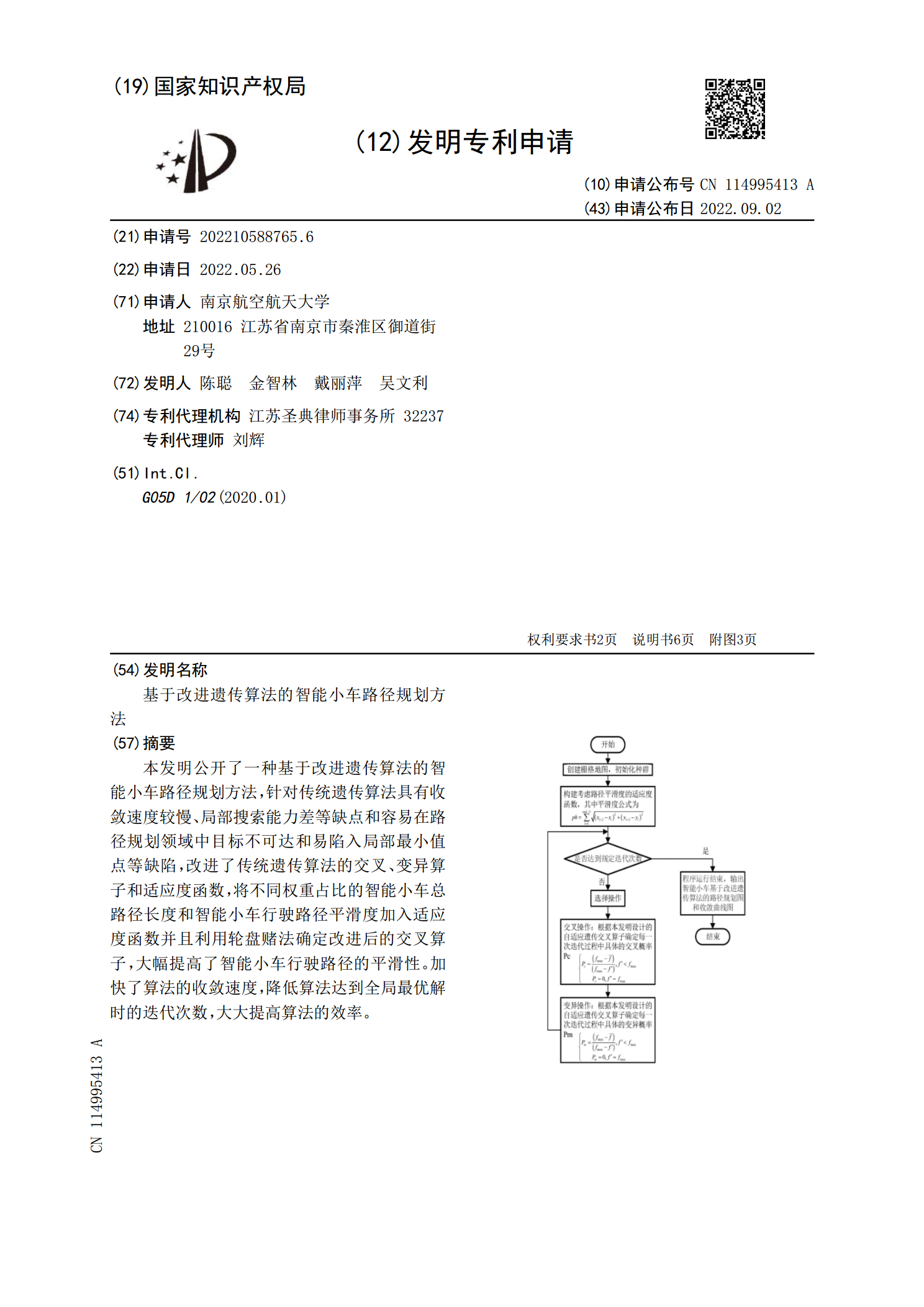
本发明公开了一种基于改进遗传算法的智能小车路径规划方法,针对传统遗传算法具有收敛速度较慢、局部搜索能力差等缺点和容易在路径规划领域中目标不可达和易陷入局部最小值点等缺陷,改进了传统遗传算法的交叉、变异算子和适应度函数,将不同权重占比的智能小车总路径长度和智能小车行驶路径平滑度加入适应度函数并且利用轮盘赌法确定改进后的交叉算子,大幅提高了智能小车行驶路径的平滑性。加快了算法的收敛速度,降低算法达到全局最优解时的迭代次数,大大提高算法的效率。

基于改进蚁群算法的智能小车路径规划仿真研究.docx
基于改进蚁群算法的智能小车路径规划仿真研究摘要:智能小车路径规划在现代智能交通系统中有着广泛的应用前景。本文提出了一种基于改进蚁群算法的智能小车路径规划方法。在该方法中,通过引入瞬态调参策略和优化的蚁群算法,实现了智能小车的高效路径规划。在广泛的仿真实验中,与其他常见路径规划算法相比,该方法取得了较好的性能表现。关键词:智能小车;路径规划;蚁群算法;瞬态调参策略;优化1.引言智能交通系统是近年来快速发展的新型交通系统,它以智能化、信息化技术为基础,实现了交通信息的集成、智能交通设备的应用、智能交通管理等功

基于改进遗传算法的自动导引小车动态路径规划及其实现.docx
基于改进遗传算法的自动导引小车动态路径规划及其实现摘要:自动导引小车是一种能够实现自主导航与控制的移动机器人,其自动路径规划能力是实现自主导航的重要组成部分。本文基于改进遗传算法,提出了一种自动导引小车动态路径规划的算法,并实现了该算法。通过实验结果,验证了该算法的有效性和实用性。关键词:自动导引小车;动态路径规划;遗传算法;实现引言自动导引小车(AutomatedGuidedVehicle,缩写AGV)是一种可以在工业、商业和服务领域广泛应用的移动机器人。其在物流、制造业、医疗、商业等领域具有广泛的应用

基于改进遗传算法的物料配送路径实时规划方法.docx
基于改进遗传算法的物料配送路径实时规划方法基于改进遗传算法的物料配送路径实时规划方法摘要:物料配送路径实时规划是供应链管理中的重要问题,直接影响物料配送的效率与成本。本文针对物料配送路径实时规划问题,提出了一种基于改进遗传算法的实时规划方法。该方法采用遗传算法作为优化算法,通过改进交叉、变异和选择算子来提高算法的收敛速度与精度。实验结果表明,所提方法在不同规模的物料配送场景中均能得到较优的配送路径规划方案,有效提高物料配送效率与降低成本。关键词:物料配送路径、实时规划、遗传算法、改进算子1.引言物料配送路

基于改进遗传算法的AGV路径规划.docx
基于改进遗传算法的AGV路径规划基于改进遗传算法的AGV路径规划摘要AGV(AutomatedGuidedVehicle)路径规划在现代物流系统中起着重要作用。为了提高路径规划的效率和准确性,本文提出了一种基于改进遗传算法的AGV路径规划方法。首先,介绍了AGV的基本原理和路径规划的基本概念。然后,详细阐述了改进遗传算法的原理和步骤。接着,针对AGV路径规划的特点,提出了一种改进的适应度函数和交叉操作算子。最后,通过实验验证了改进后的遗传算法在AGV路径规划中的有效性和优越性。关键词:AGV,路径规划,遗