
基于圆周扫描路径的非视域成像方法、系统及存储介质.pdf

宛菡****魔王


1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于圆周扫描路径的非视域成像方法、系统及存储介质.pdf
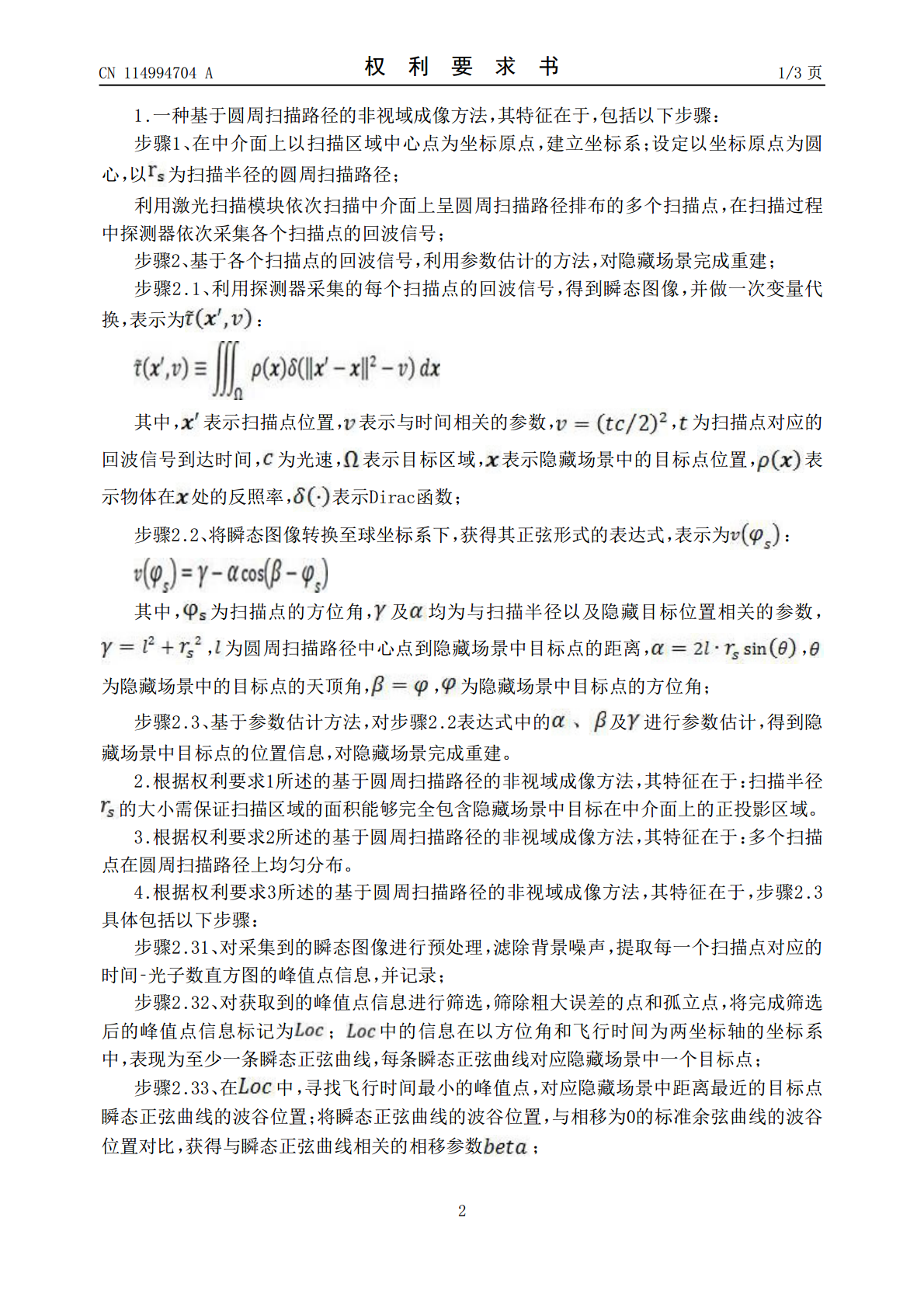
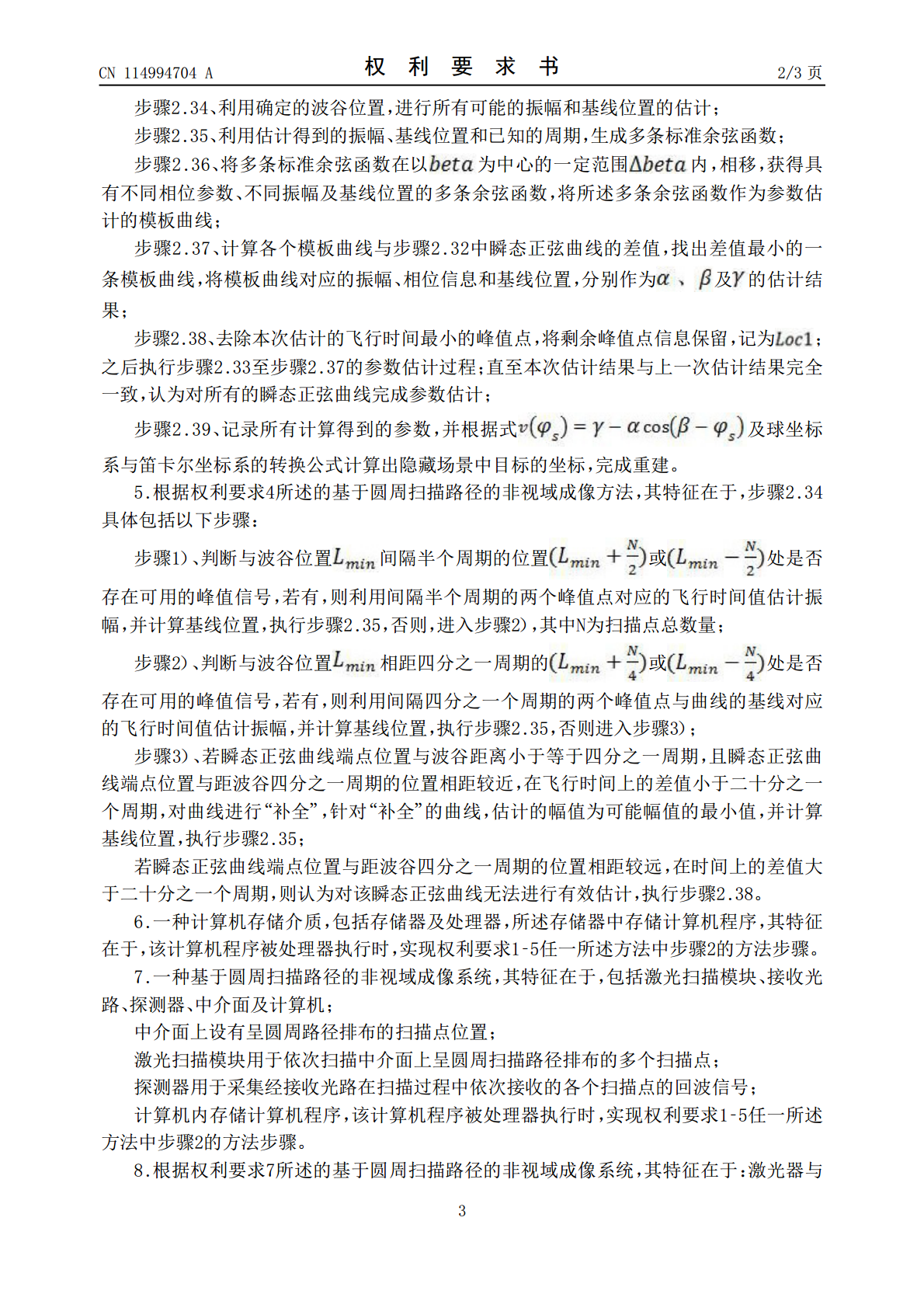
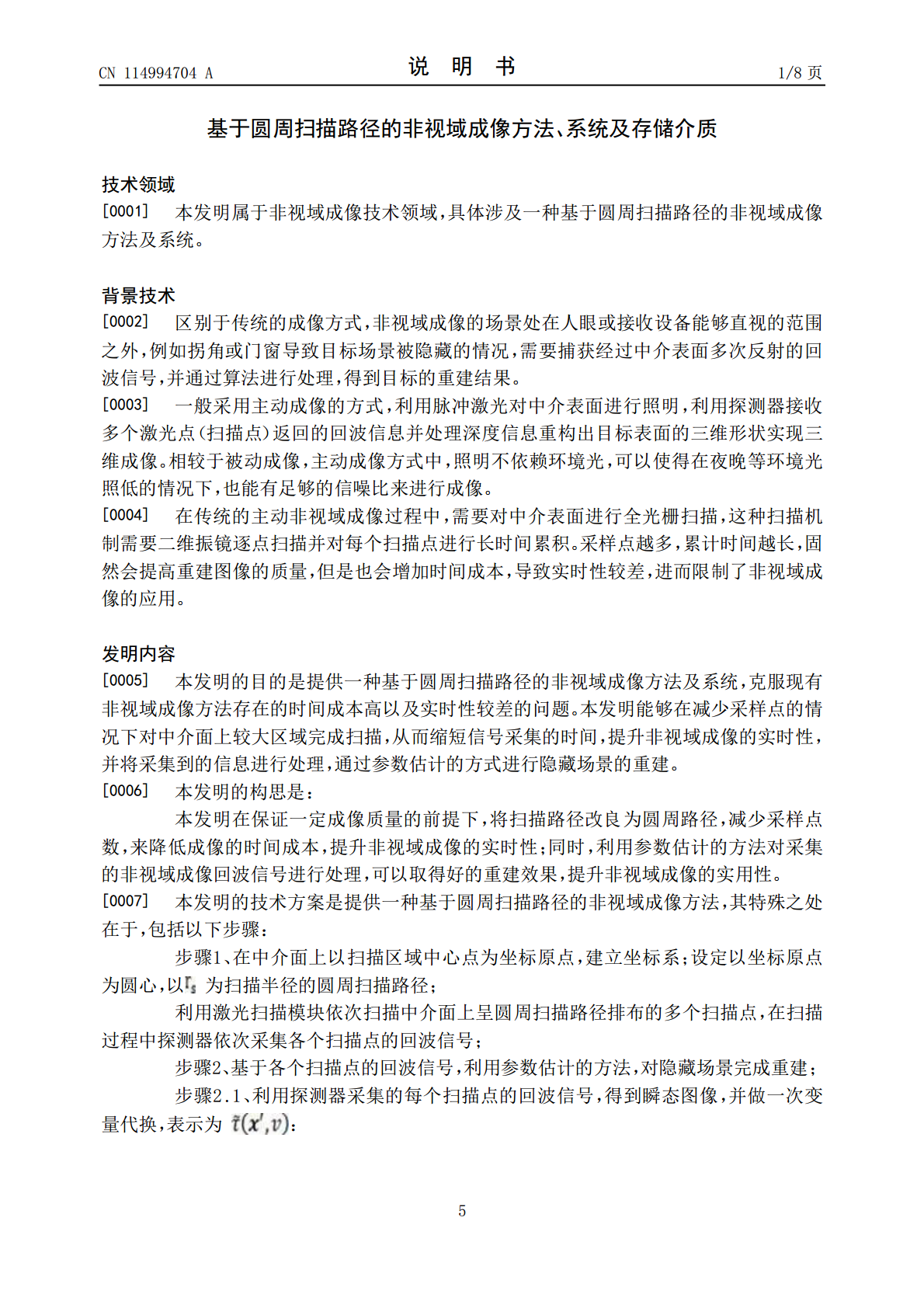
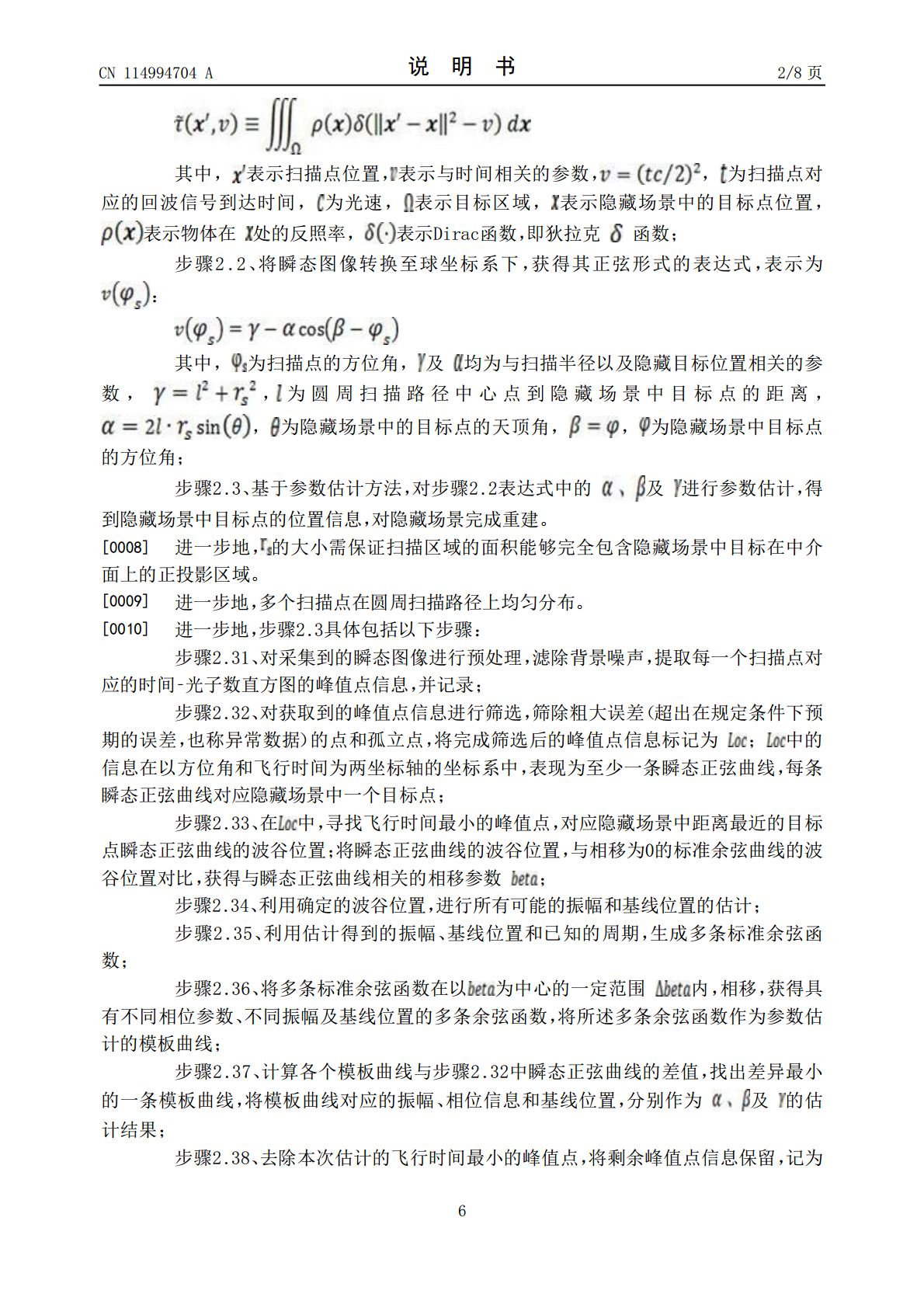
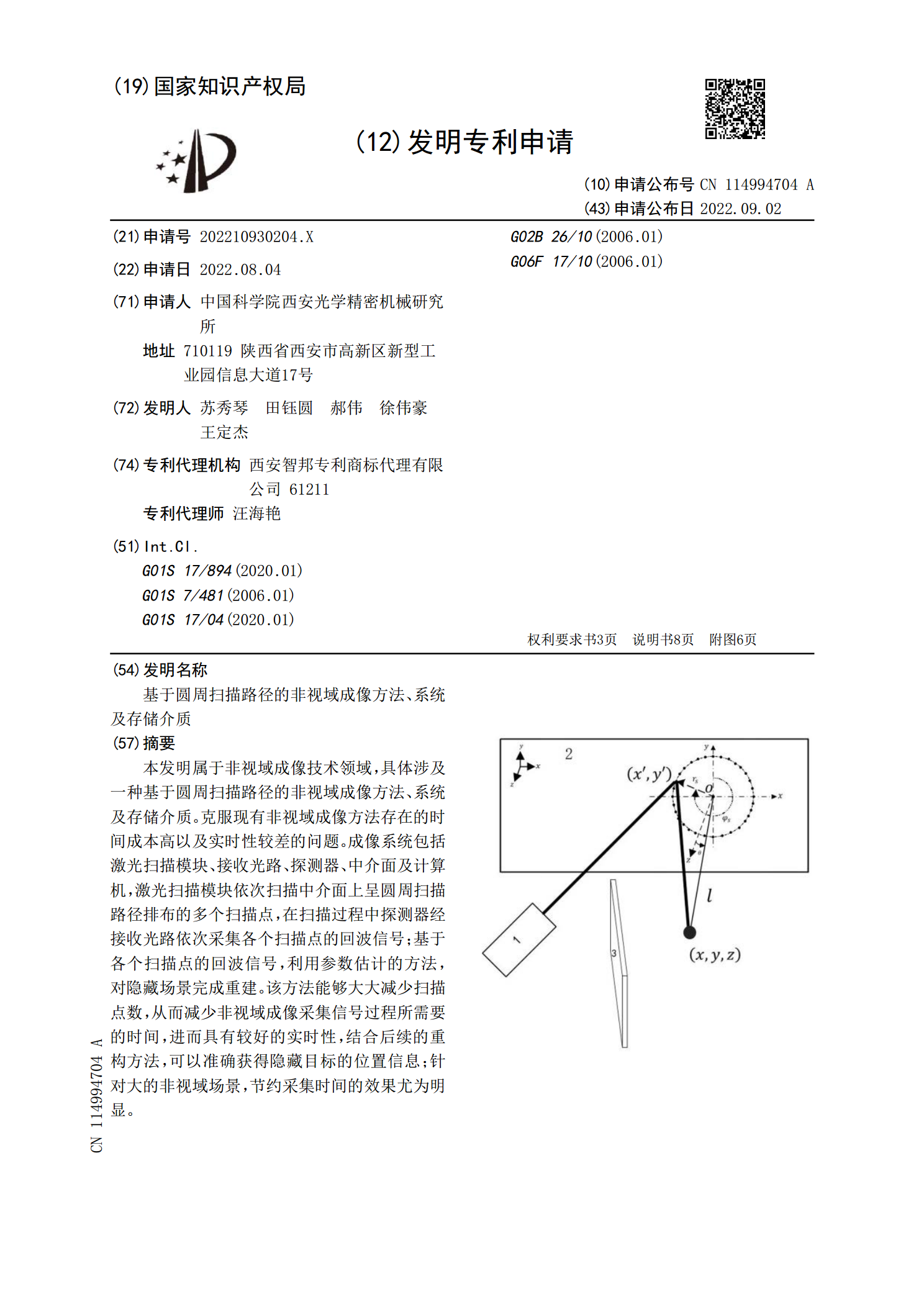
本发明属于非视域成像技术领域,具体涉及一种基于圆周扫描路径的非视域成像方法、系统及存储介质。克服现有非视域成像方法存在的时间成本高以及实时性较差的问题。成像系统包括激光扫描模块、接收光路、探测器、中介面及计算机,激光扫描模块依次扫描中介面上呈圆周扫描路径排布的多个扫描点,在扫描过程中探测器经接收光路依次采集各个扫描点的回波信号;基于各个扫描点的回波信号,利用参数估计的方法,对隐藏场景完成重建。该方法能够大大减少扫描点数,从而减少非视域成像采集信号过程所需要的时间,进而具有较好的实时性,结合后续的重构方法,
成像控制方法及系统、成像系统和存储介质.pdf
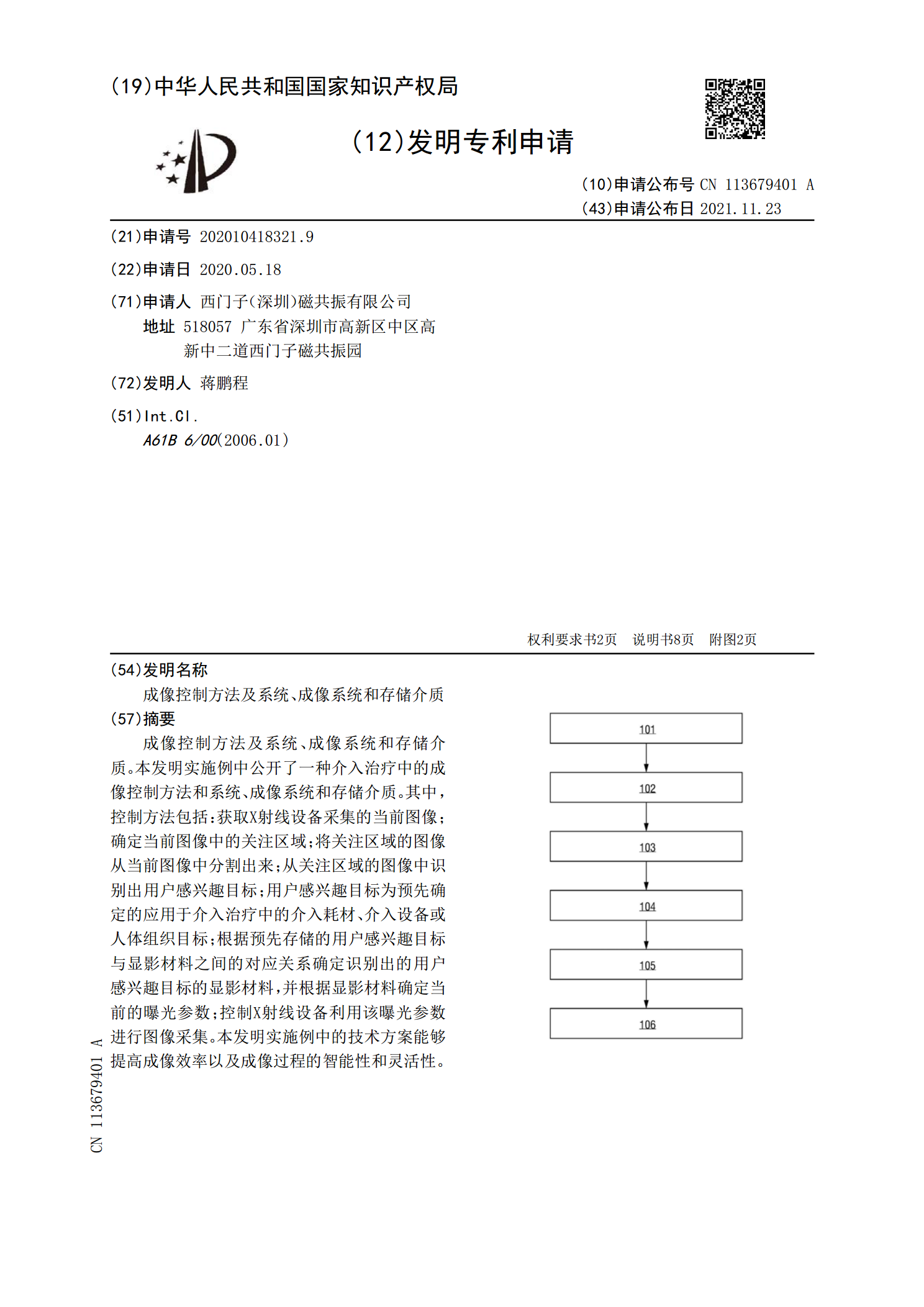
成像控制方法及系统、成像系统和存储介质。本发明实施例中公开了一种介入治疗中的成像控制方法和系统、成像系统和存储介质。其中,控制方法包括:获取X射线设备采集的当前图像;确定当前图像中的关注区域;将关注区域的图像从当前图像中分割出来;从关注区域的图像中识别出用户感兴趣目标;用户感兴趣目标为预先确定的应用于介入治疗中的介入耗材、介入设备或人体组织目标;根据预先存储的用户感兴趣目标与显影材料之间的对应关系确定识别出的用户感兴趣目标的显影材料,并根据显影材料确定当前的曝光参数;控制X射线设备利用该曝光参数进行图像采
一种非视域成像系统及成像方法.pdf
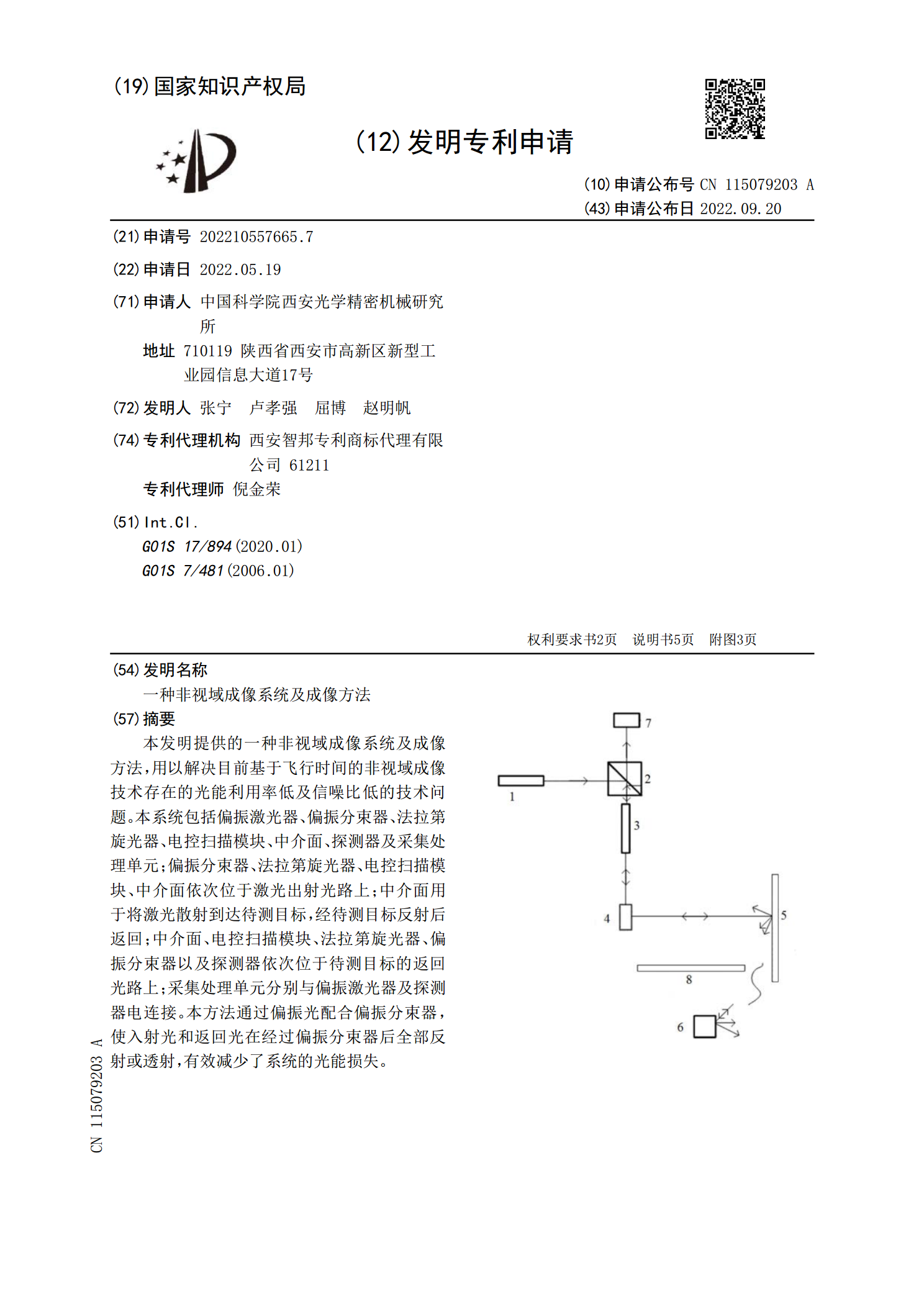
本发明提供的一种非视域成像系统及成像方法,用以解决目前基于飞行时间的非视域成像技术存在的光能利用率低及信噪比低的技术问题。本系统包括偏振激光器、偏振分束器、法拉第旋光器、电控扫描模块、中介面、探测器及采集处理单元;偏振分束器、法拉第旋光器、电控扫描模块、中介面依次位于激光出射光路上;中介面用于将激光散射到达待测目标,经待测目标反射后返回;中介面、电控扫描模块、法拉第旋光器、偏振分束器以及探测器依次位于待测目标的返回光路上;采集处理单元分别与偏振激光器及探测器电连接。本方法通过偏振光配合偏振分束器,使入射光
基于红外成像的测温方法、装置、系统及可读存储介质.pdf
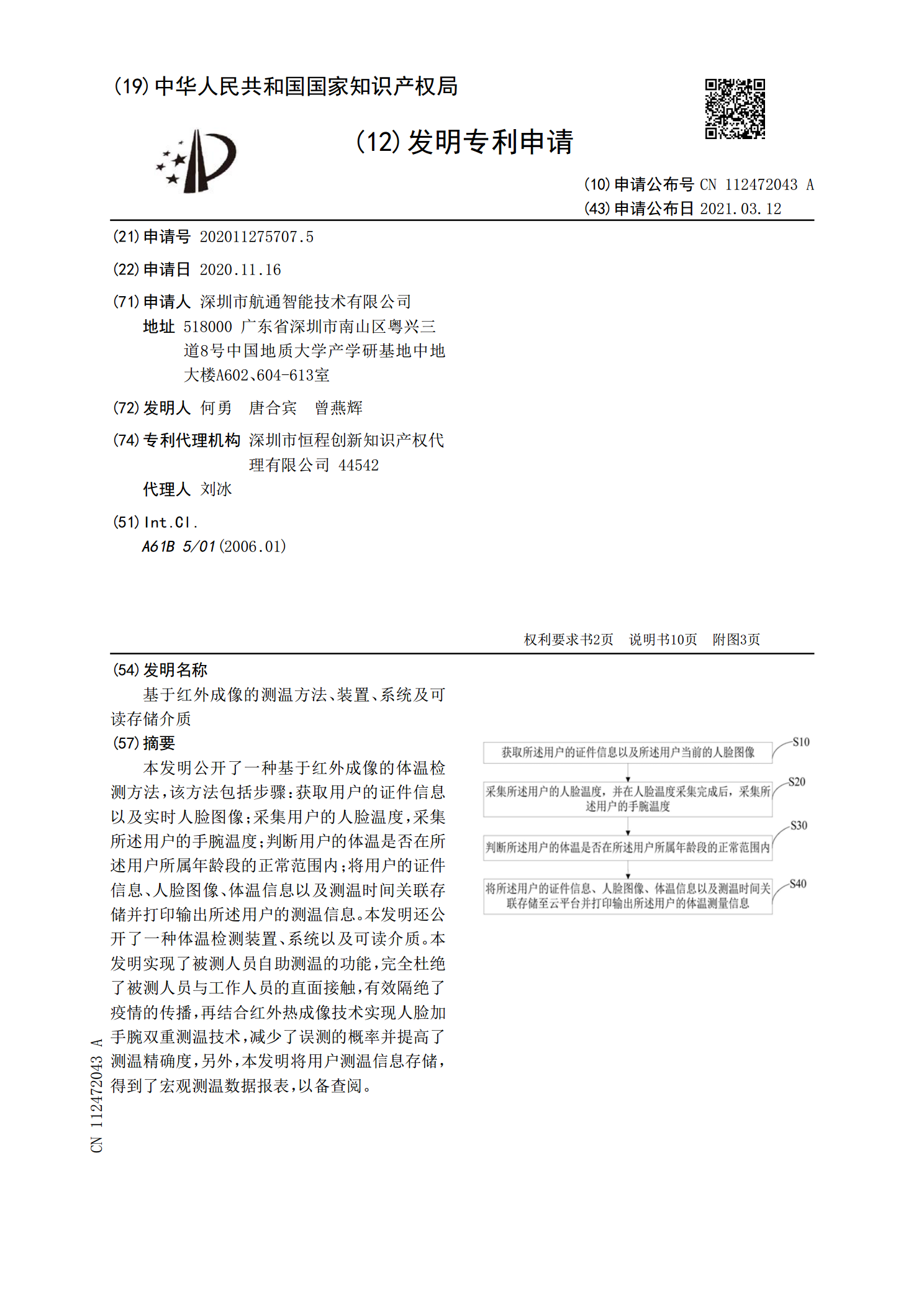
本发明公开了一种基于红外成像的体温检测方法,该方法包括步骤:获取用户的证件信息以及实时人脸图像;采集用户的人脸温度,采集所述用户的手腕温度;判断用户的体温是否在所述用户所属年龄段的正常范围内;将用户的证件信息、人脸图像、体温信息以及测温时间关联存储并打印输出所述用户的测温信息。本发明还公开了一种体温检测装置、系统以及可读介质。本发明实现了被测人员自助测温的功能,完全杜绝了被测人员与工作人员的直面接触,有效隔绝了疫情的传播,再结合红外热成像技术实现人脸加手腕双重测温技术,减少了误测的概率并提高了测温精确度,
基于BMC的串口路径选择方法、系统、终端及存储介质.pdf
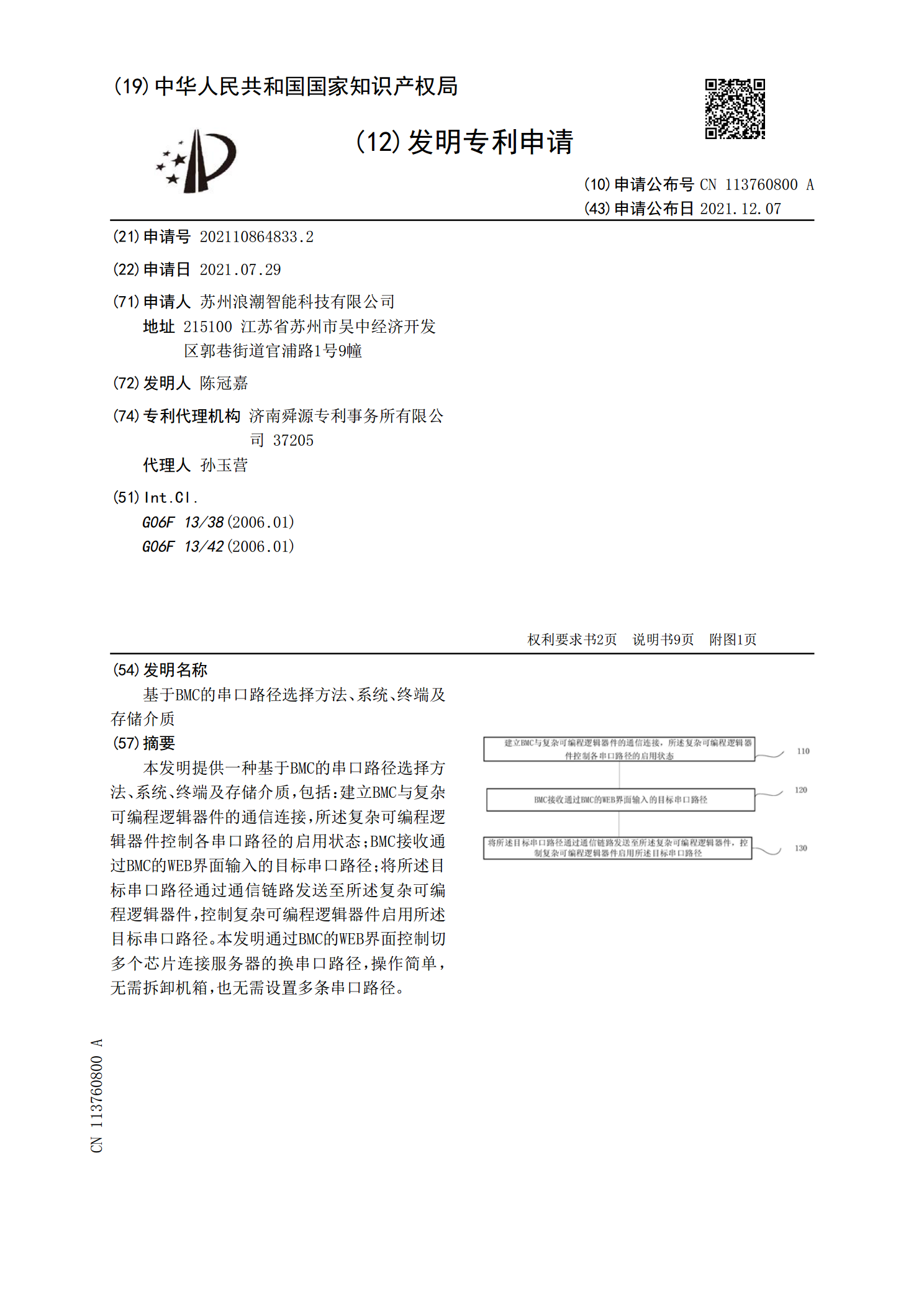
本发明提供一种基于BMC的串口路径选择方法、系统、终端及存储介质,包括:建立BMC与复杂可编程逻辑器件的通信连接,所述复杂可编程逻辑器件控制各串口路径的启用状态;BMC接收通过BMC的WEB界面输入的目标串口路径;将所述目标串口路径通过通信链路发送至所述复杂可编程逻辑器件,控制复杂可编程逻辑器件启用所述目标串口路径。本发明通过BMC的WEB界面控制切多个芯片连接服务器的换串口路径,操作简单,无需拆卸机箱,也无需设置多条串口路径。