
基于改进匹配追踪的机载阵列雷达超分辨前视成像方法及装置.pdf

猫巷****松臣

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于改进匹配追踪的机载阵列雷达超分辨前视成像方法及装置.pdf
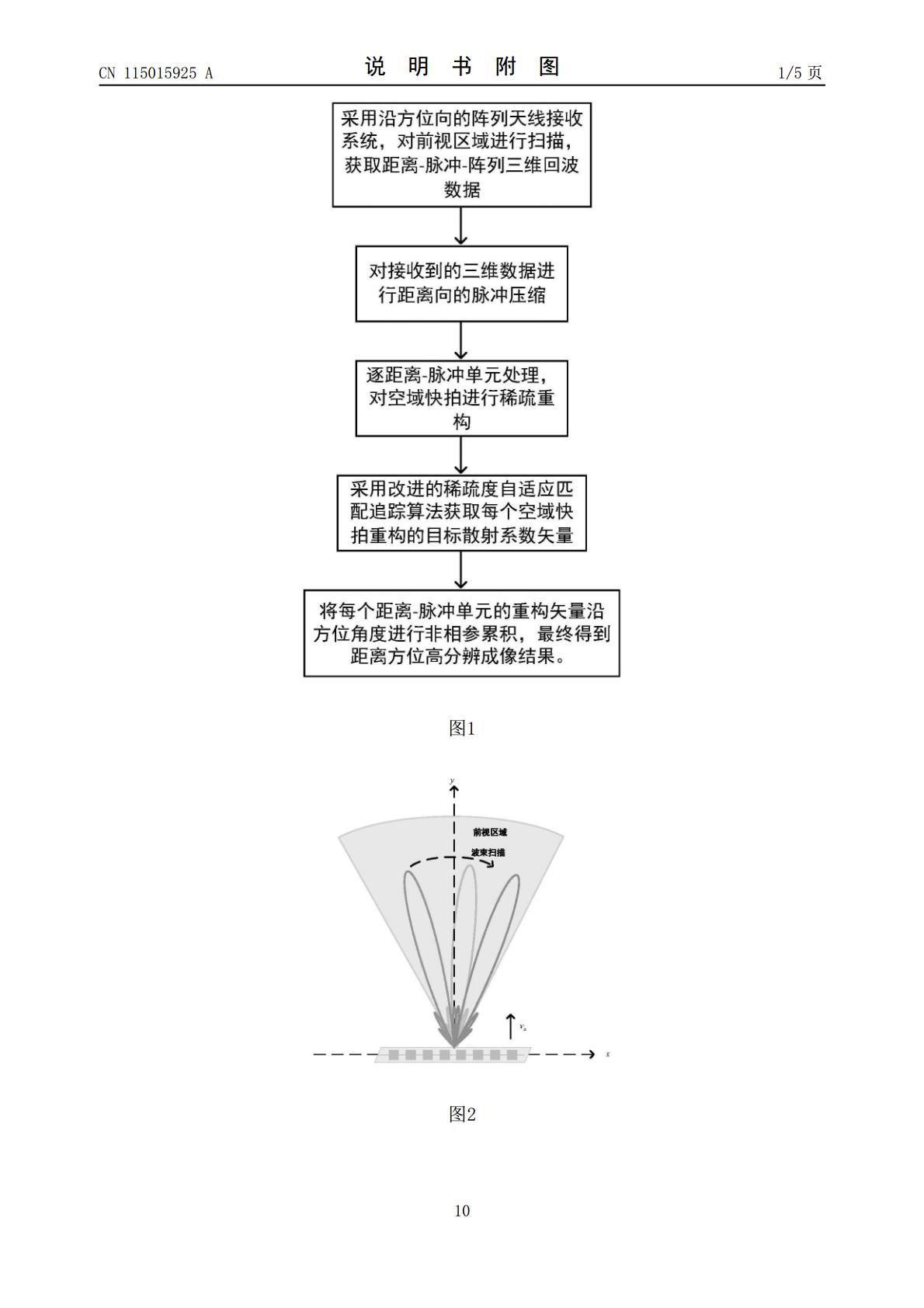
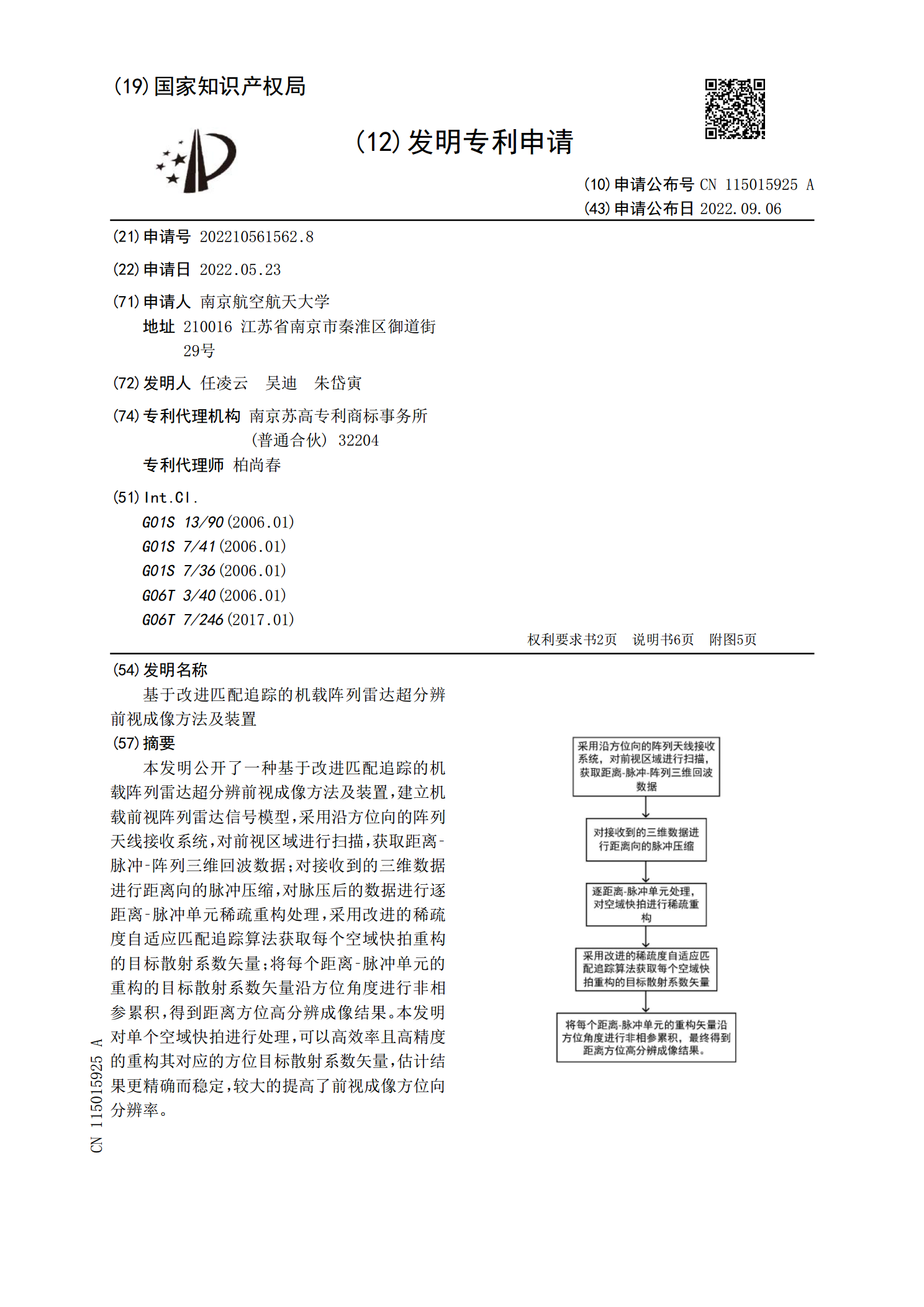
本发明公开了一种基于改进匹配追踪的机载阵列雷达超分辨前视成像方法及装置,建立机载前视阵列雷达信号模型,采用沿方位向的阵列天线接收系统,对前视区域进行扫描,获取距离‑脉冲‑阵列三维回波数据;对接收到的三维数据进行距离向的脉冲压缩,对脉压后的数据进行逐距离‑脉冲单元稀疏重构处理,采用改进的稀疏度自适应匹配追踪算法获取每个空域快拍重构的目标散射系数矢量;将每个距离‑脉冲单元的重构的目标散射系数矢量沿方位角度进行非相参累积,得到距离方位高分辨成像结果。本发明对单个空域快拍进行处理,可以高效率且高精度的重构其对应的

基于MIMO阵列与压缩感知的雷达前视超分辨成像方法研究.docx
基于MIMO阵列与压缩感知的雷达前视超分辨成像方法研究基于MIMO阵列与压缩感知的雷达前视超分辨成像方法研究摘要:随着科技的不断进步,雷达成像技术得到了广泛应用。其中,超分辨成像是提高雷达分辨率的一种有效方法。然而,传统的雷达超分辨成像方法在资源利用率和成像质量方面存在一定的局限性。针对这个问题,本文提出了一种基于MIMO阵列与压缩感知相结合的雷达前视超分辨成像方法。该方法通过利用MIMO阵列的多通道信息和压缩感知的理论,实现了对目标物体的高分辨成像。实验结果表明,该方法在保证成像质量的同时,还显著提高了
一种机载雷达斜前视超分辨成像方法.pdf
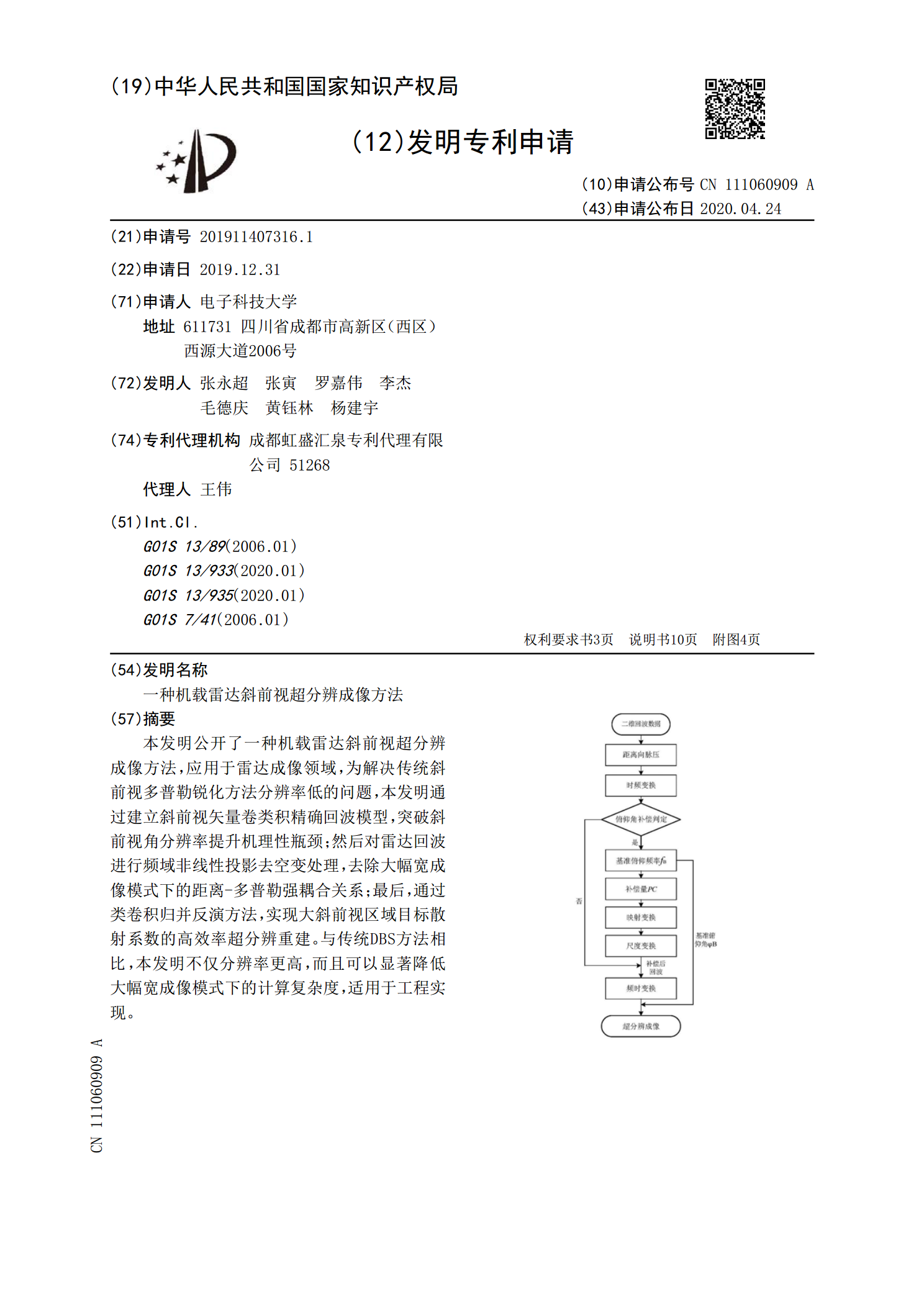
本发明公开了一种机载雷达斜前视超分辨成像方法,应用于雷达成像领域,为解决传统斜前视多普勒锐化方法分辨率低的问题,本发明通过建立斜前视矢量卷类积精确回波模型,突破斜前视角分辨率提升机理性瓶颈;然后对雷达回波进行频域非线性投影去空变处理,去除大幅宽成像模式下的距离‑多普勒强耦合关系;最后,通过类卷积归并反演方法,实现大斜前视区域目标散射系数的高效率超分辨重建。与传统DBS方法相比,本发明不仅分辨率更高,而且可以显著降低大幅宽成像模式下的计算复杂度,适用于工程实现。
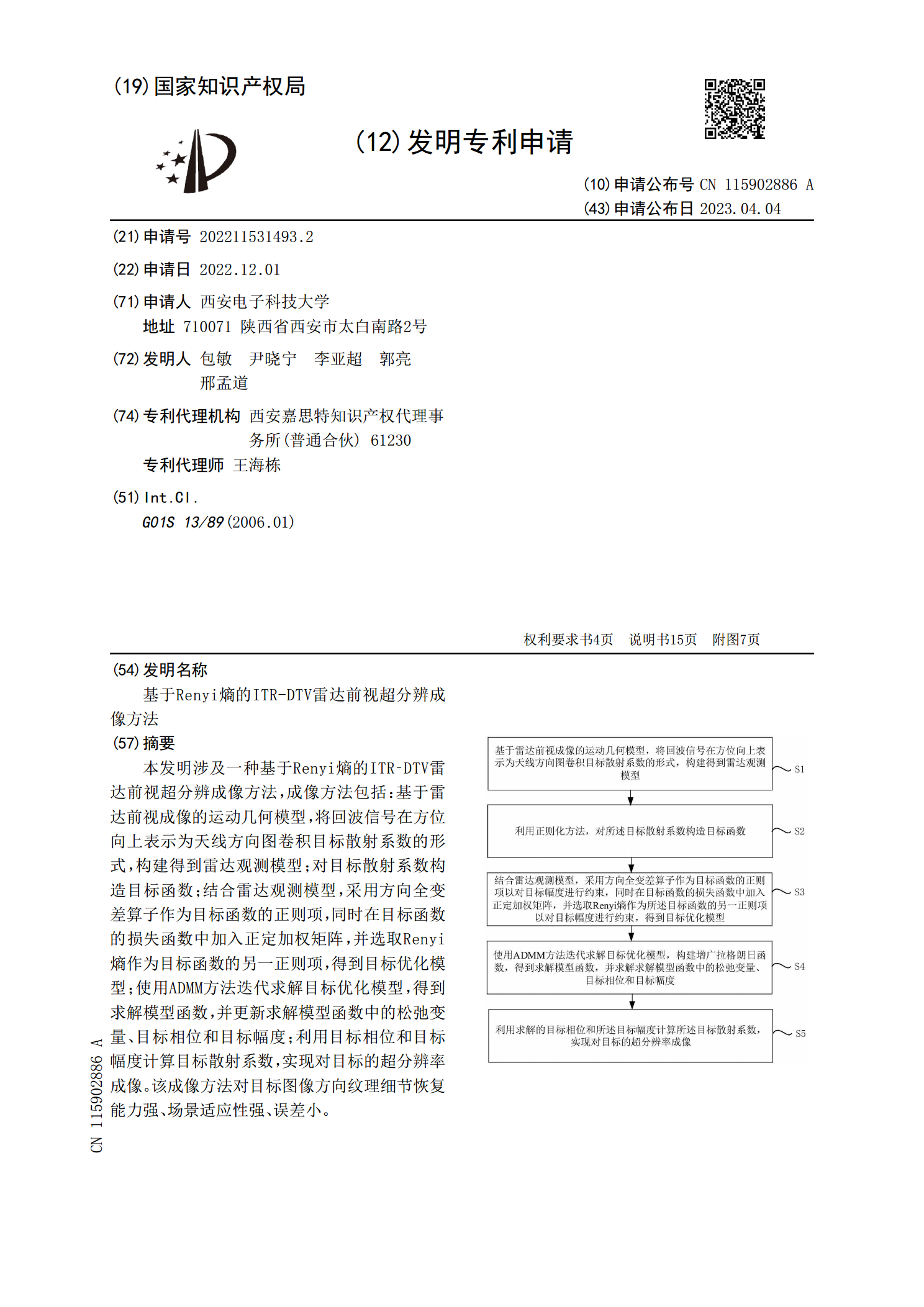
基于Renyi熵的ITR-DTV雷达前视超分辨成像方法.pdf
本发明涉及一种基于Renyi熵的ITR‑DTV雷达前视超分辨成像方法,成像方法包括:基于雷达前视成像的运动几何模型,将回波信号在方位向上表示为天线方向图卷积目标散射系数的形式,构建得到雷达观测模型;对目标散射系数构造目标函数;结合雷达观测模型,采用方向全变差算子作为目标函数的正则项,同时在目标函数的损失函数中加入正定加权矩阵,并选取Renyi熵作为目标函数的另一正则项,得到目标优化模型;使用ADMM方法迭代求解目标优化模型,得到求解模型函数,并更新求解模型函数中的松弛变量、目标相位和目标幅度;利用目标相位
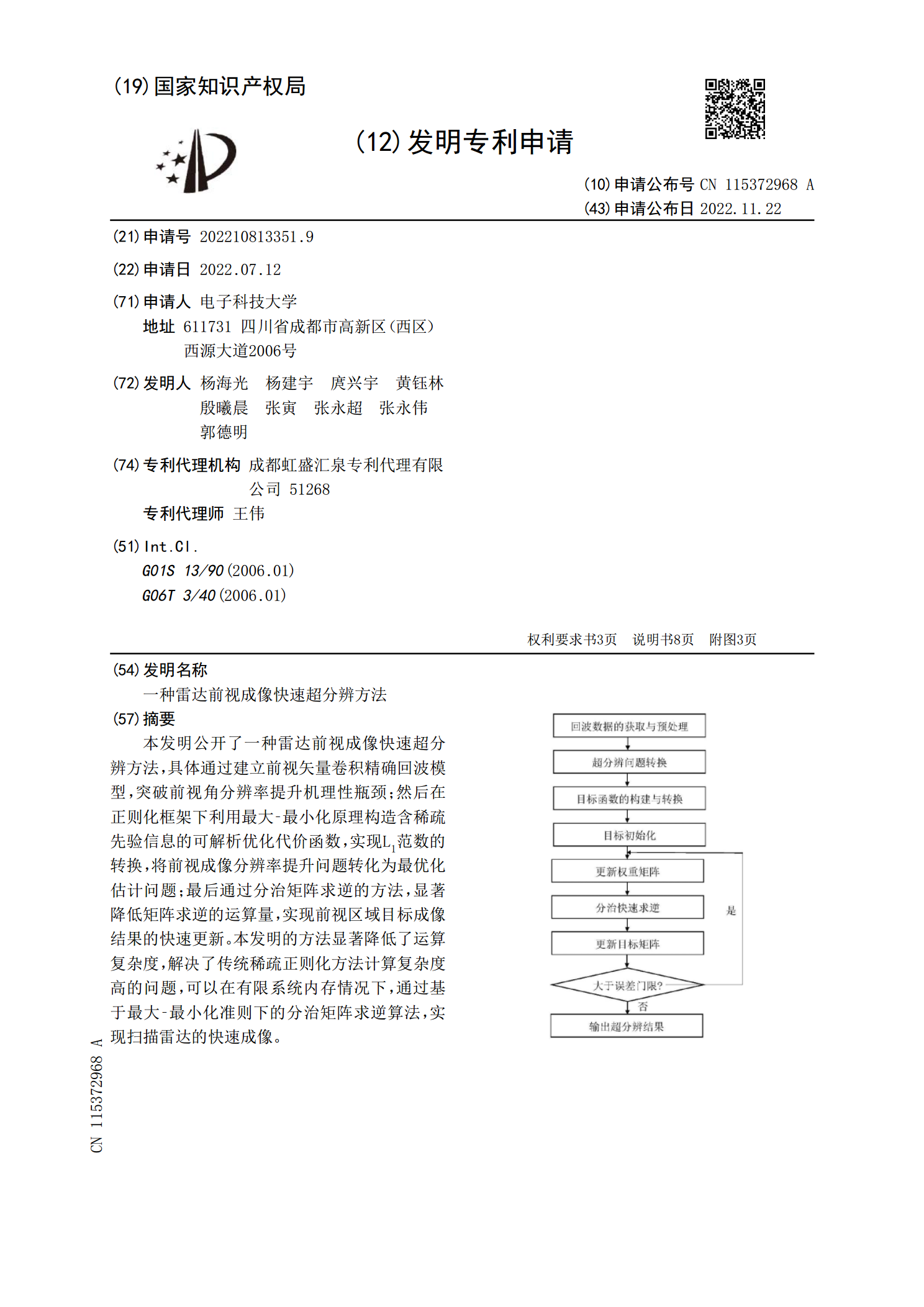
一种雷达前视成像快速超分辨方法.pdf
本发明公开了一种雷达前视成像快速超分辨方法,具体通过建立前视矢量卷积精确回波模型,突破前视角分辨率提升机理性瓶颈;然后在正则化框架下利用最大?最小化原理构造含稀疏先验信息的可解析优化代价函数,实现L<base:Sub>1</base:Sub>范数的转换,将前视成像分辨率提升问题转化为最优化估计问题;最后通过分治矩阵求逆的方法,显著降低矩阵求逆的运算量,实现前视区域目标成像结果的快速更新。本发明的方法显著降低了运算复杂度,解决了传统稀疏正则化方法计算复杂度高的问题,可以在有限系统内存情况下,通过基于最大?最