
大视场红外成像方法及装置.pdf

永香****能手

1/10
2/10
3/10
4/10
5/10
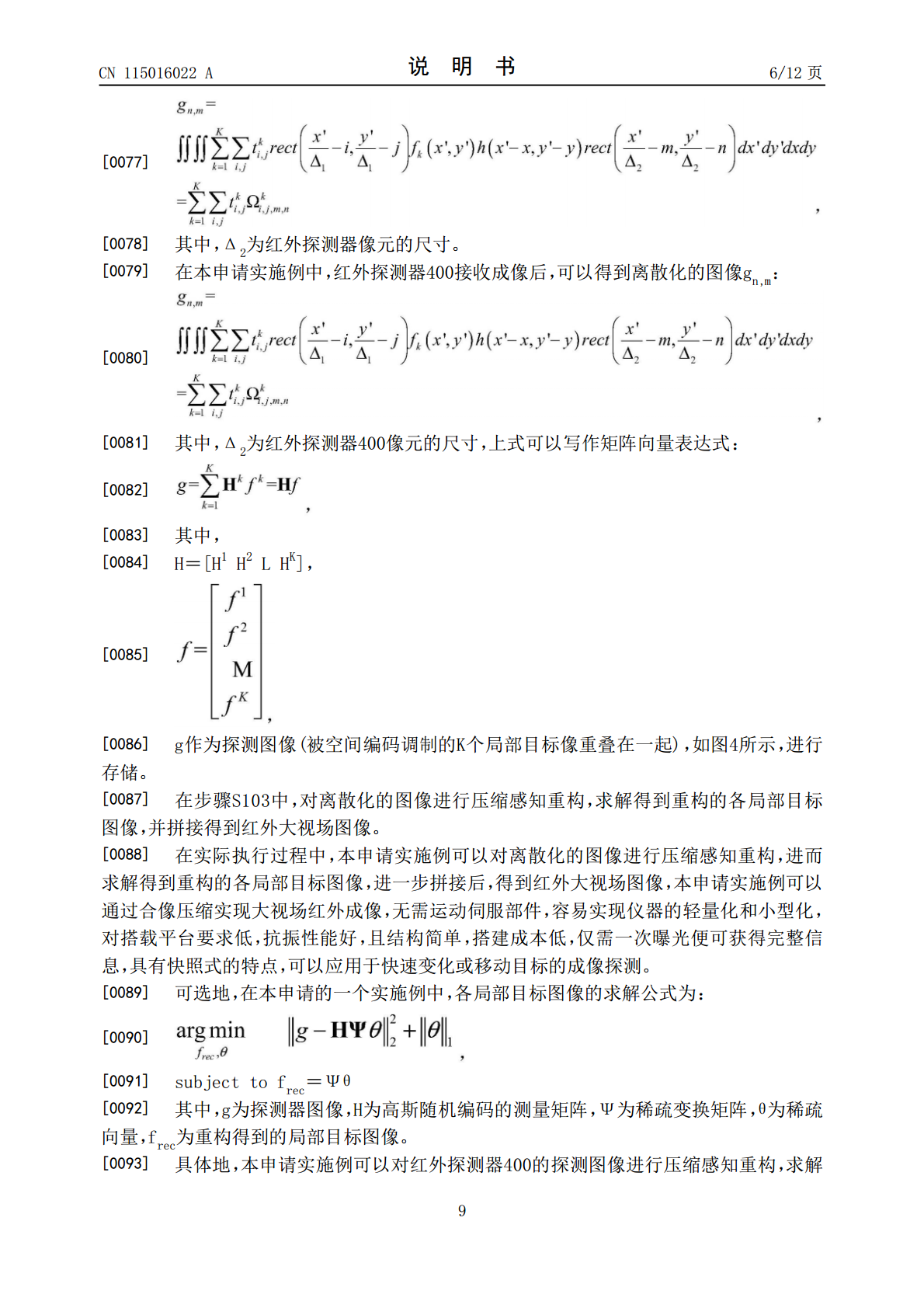
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
大视场红外成像方法及装置.pdf
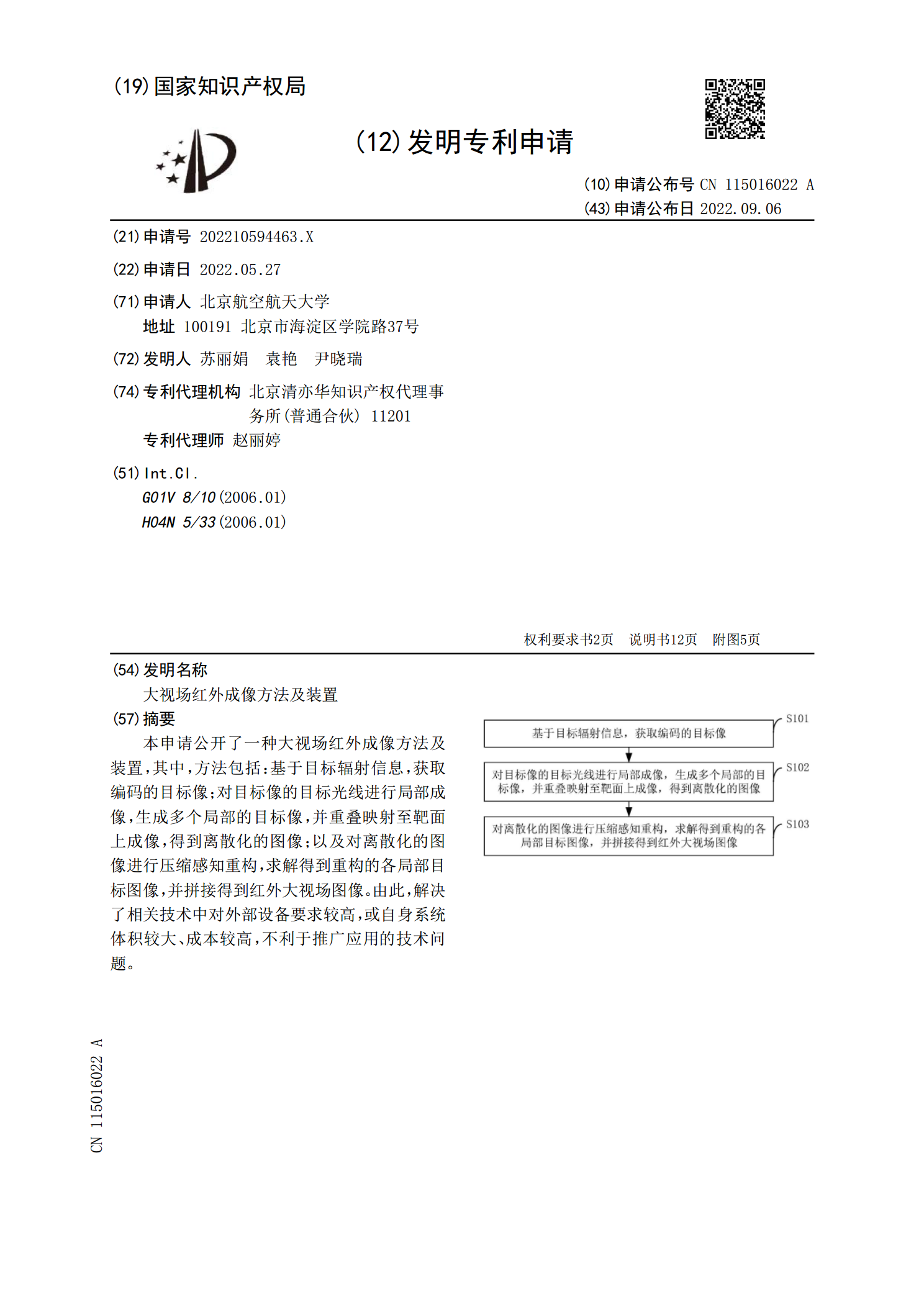
本申请公开了一种大视场红外成像方法及装置,其中,方法包括:基于目标辐射信息,获取编码的目标像;对目标像的目标光线进行局部成像,生成多个局部的目标像,并重叠映射至靶面上成像,得到离散化的图像;以及对离散化的图像进行压缩感知重构,求解得到重构的各局部目标图像,并拼接得到红外大视场图像。由此,解决了相关技术中对外部设备要求较高,或自身系统体积较大、成本较高,不利于推广应用的技术问题。
大视场凝视型红外成像森林防火预警系统.pdf
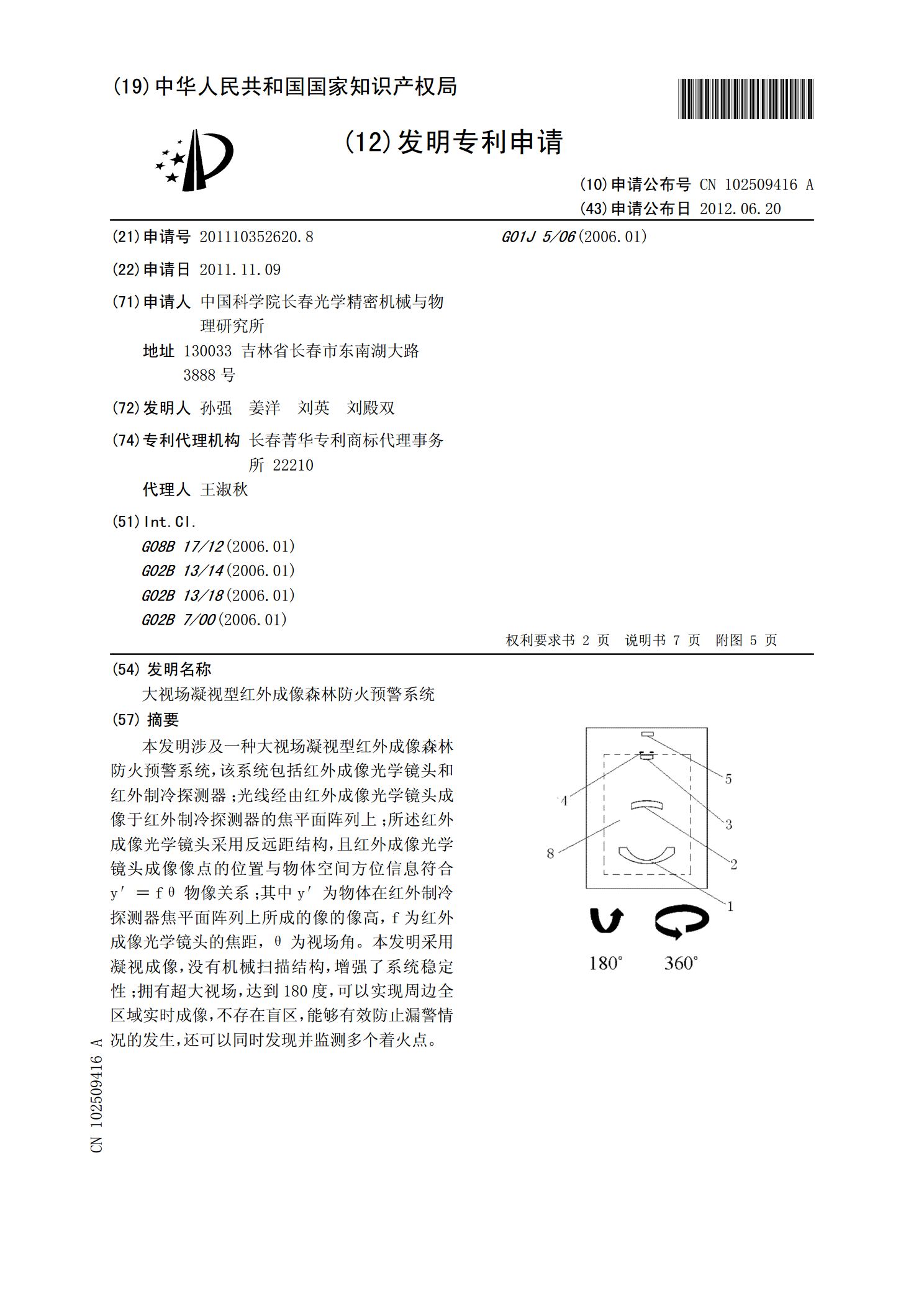
本发明涉及一种大视场凝视型红外成像森林防火预警系统,该系统包括红外成像光学镜头和红外制冷探测器;光线经由红外成像光学镜头成像于红外制冷探测器的焦平面阵列上;所述红外成像光学镜头采用反远距结构,且红外成像光学镜头成像像点的位置与物体空间方位信息符合y′=fθ物像关系;其中y′为物体在红外制冷探测器焦平面阵列上所成的像的像高,f为红外成像光学镜头的焦距,θ为视场角。本发明采用凝视成像,没有机械扫描结构,增强了系统稳定性;拥有超大视场,达到180度,可以实现周边全区域实时成像,不存在盲区,能够有效防止漏警情况的

一种基于压缩感知的大视场高分辨成像方法及装置.pdf
本发明公开一种基于压缩感知的大视场高分辨成像方法及装置,涉及光电成像技术领域,以解决传统成像系统高精度成像集成难的技术问题。方法包括:对光信号进行预处理,将记录的阵列探测器每个像元接收到的光信号的强度信息,与预低分辨率观测矩阵关联运算,得到大视场区域图像;对大视场区域图像进行二值化处理,根据确定的目标物体区域,对高分辨率观测矩阵进行更新,将强度信息与更新的高分辨率观测矩阵进行关联运算,得到目标区域高分辨图像;将高分辨图像等比例缩放后与大视场区域图像进行融合,得到大视场高分辨成像。上述方法纪装置实现了大视场
一种测量模拟眼大视场成像的装置.pdf
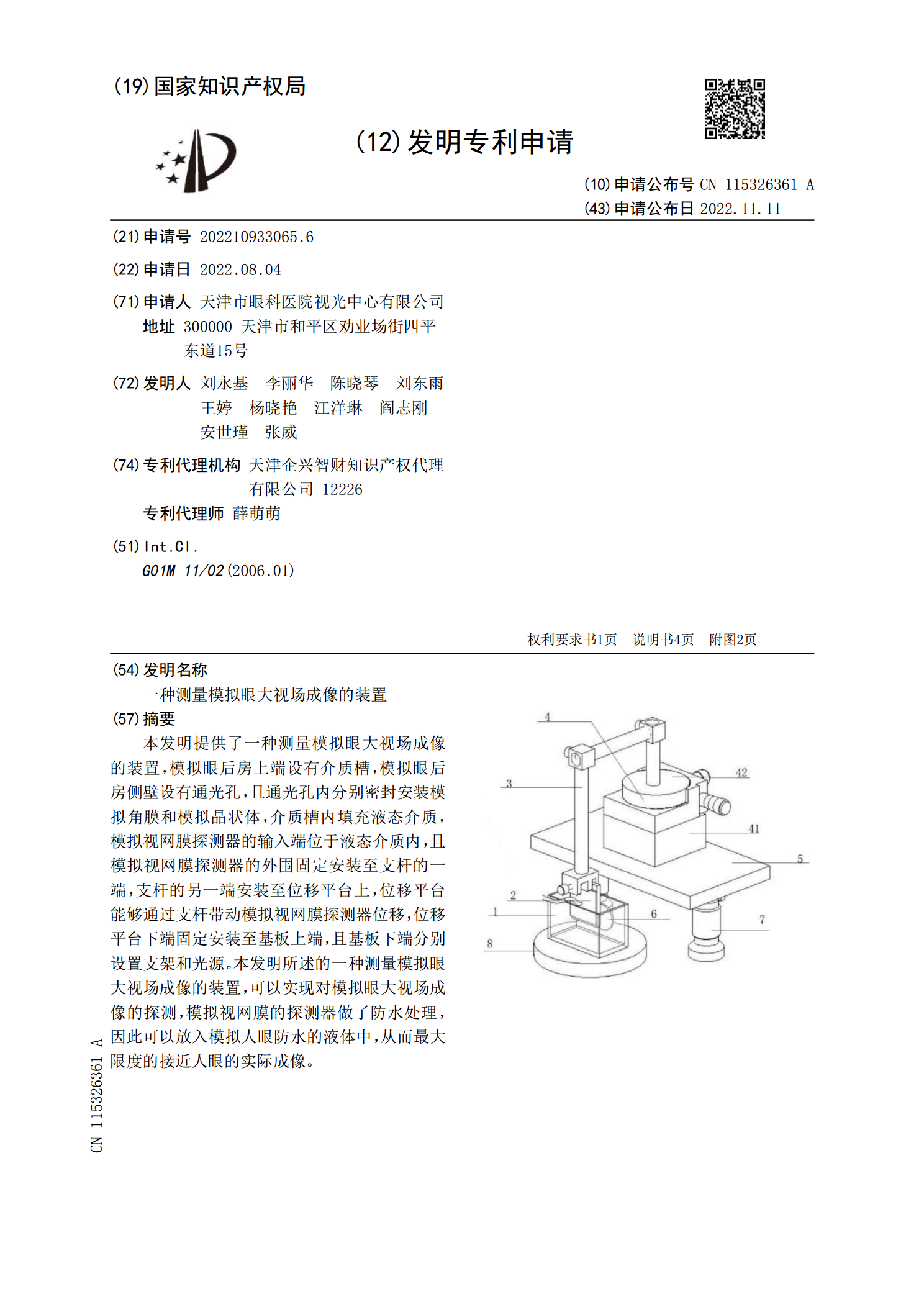
本发明提供了一种测量模拟眼大视场成像的装置,模拟眼后房上端设有介质槽,模拟眼后房侧壁设有通光孔,且通光孔内分别密封安装模拟角膜和模拟晶状体,介质槽内填充液态介质,模拟视网膜探测器的输入端位于液态介质内,且模拟视网膜探测器的外围固定安装至支杆的一端,支杆的另一端安装至位移平台上,位移平台能够通过支杆带动模拟视网膜探测器位移,位移平台下端固定安装至基板上端,且基板下端分别设置支架和光源。本发明所述的一种测量模拟眼大视场成像的装置,可以实现对模拟眼大视场成像的探测,模拟视网膜的探测器做了防水处理,因此可以放入模

高分辨率大视场计算成像方法.pptx
高分辨率大视场计算成像方法目录添加章节标题高分辨率大视场计算成像方法概述定义和原理发展和应用领域优势和挑战高分辨率大视场计算成像的关键技术多尺度图像融合技术深度学习技术光学设计技术计算成像算法高分辨率大视场计算成像的应用场景遥感成像医学影像诊断安全监控虚拟现实和增强现实高分辨率大视场计算成像的未来发展技术创新方向应用领域拓展面临的挑战和解决方案未来发展趋势和展望THANKYOU