
一种行人识别与追踪方法、装置、可读存储介质及设备.pdf

a是****澜吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种行人识别与追踪方法、装置、可读存储介质及设备.pdf
本发明提供一种行人识别与追踪方法、装置、可读存储介质及设备,方法包括:使用多个摄像头采集不同区域的视频流;对视频流的图片进行行人检测及行人特征提取;采用卡尔曼滤波及匈牙利算法对上下帧行人运动的轨迹进行匹配,输出当前轨迹匹配的目标行人位置数据集;对视频流的每一帧图片进行人脸检测及识别,得到每个行人的人脸ID及其人脸位置数据集;将目标行人的所述目标行人位置数据集与各所述人脸位置数据集进行空间距离匹配,确定目标行人的追踪ID;根据目标行人的追踪ID采用追踪器对目标行人进行多个场景下追踪。本发明通过行人检测和人脸

行人重识别数据增强方法、装置、设备及可读存储介质.pdf
本发明提供一种行人重识别数据增强方法、装置、设备及可读存储介质。该方法包括获取多个行人样本图像,每个行人样本图像携带类别标签;生成随机灰度块替换器,对所述行人样本图像上的随机区域进行灰度块替换处理,得到随机灰度化行人样本图像,所述随机灰度化行人样本图像上具有一个或多个灰度块,且携带与对应的所述行人样本图像相同的类别标签;将多个所述行人样本图像和所述随机灰度化行人样本图像合并,得到联合训练集。本发明提供的行人重识别数据增强方法充分利用了灰度图像保留的结构信息,使得图像的颜色信息与灰度图像的空间结构信息在模型
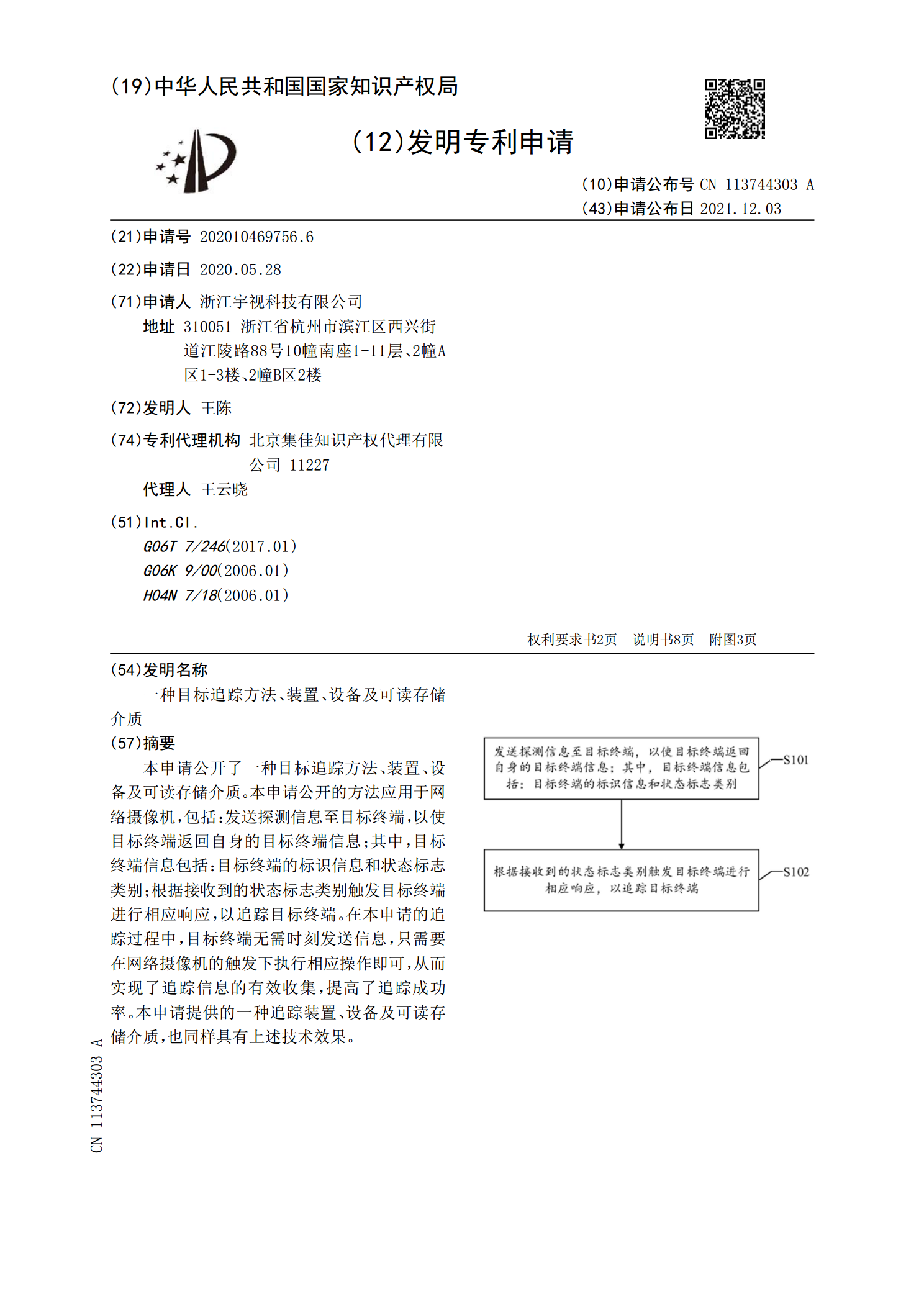
一种目标追踪方法、装置、设备及可读存储介质.pdf
本申请公开了一种目标追踪方法、装置、设备及可读存储介质。本申请公开的方法应用于网络摄像机,包括:发送探测信息至目标终端,以使目标终端返回自身的目标终端信息;其中,目标终端信息包括:目标终端的标识信息和状态标志类别;根据接收到的状态标志类别触发目标终端进行相应响应,以追踪目标终端。在本申请的追踪过程中,目标终端无需时刻发送信息,只需要在网络摄像机的触发下执行相应操作即可,从而实现了追踪信息的有效收集,提高了追踪成功率。本申请提供的一种追踪装置、设备及可读存储介质,也同样具有上述技术效果。
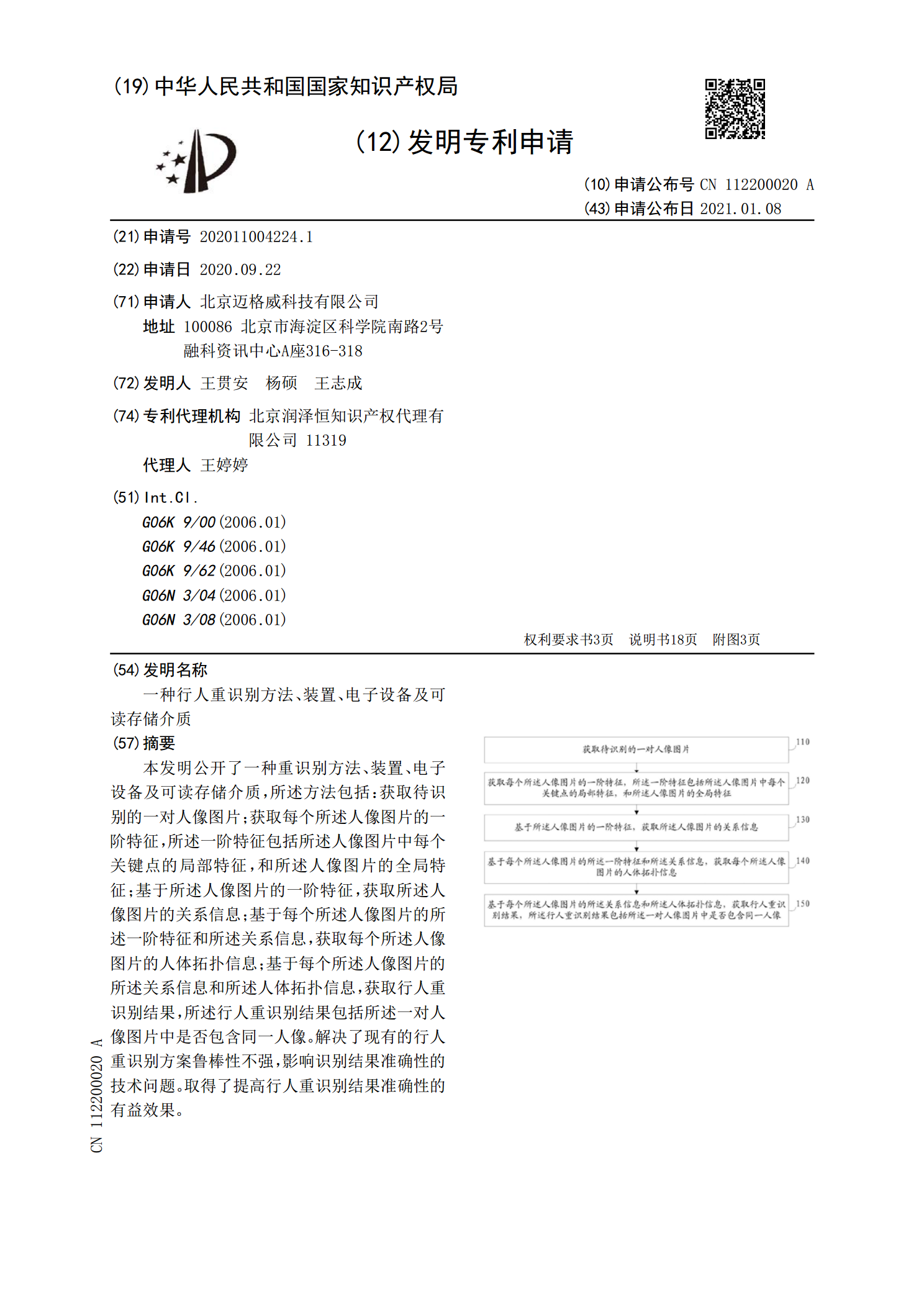
一种行人重识别方法、装置、电子设备及可读存储介质.pdf
本发明公开了一种重识别方法、装置、电子设备及可读存储介质,所述方法包括:获取待识别的一对人像图片;获取每个所述人像图片的一阶特征,所述一阶特征包括所述人像图片中每个关键点的局部特征,和所述人像图片的全局特征;基于所述人像图片的一阶特征,获取所述人像图片的关系信息;基于每个所述人像图片的所述一阶特征和所述关系信息,获取每个所述人像图片的人体拓扑信息;基于每个所述人像图片的所述关系信息和所述人体拓扑信息,获取行人重识别结果,所述行人重识别结果包括所述一对人像图片中是否包含同一人像。解决了现有的行人重识别方案鲁
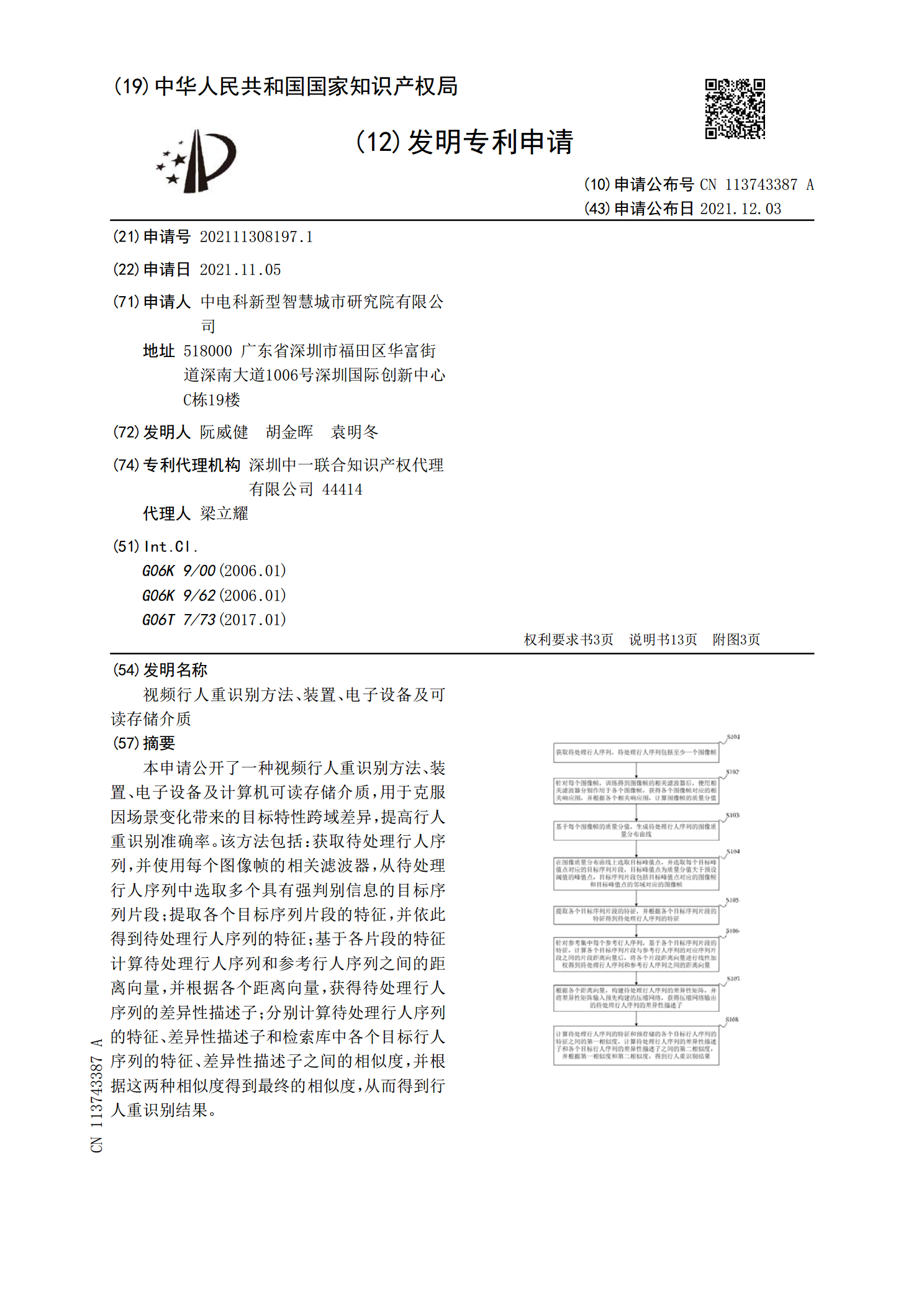
视频行人重识别方法、装置、电子设备及可读存储介质.pdf
本申请公开了一种视频行人重识别方法、装置、电子设备及计算机可读存储介质,用于克服因场景变化带来的目标特性跨域差异,提高行人重识别准确率。该方法包括:获取待处理行人序列,并使用每个图像帧的相关滤波器,从待处理行人序列中选取多个具有强判别信息的目标序列片段;提取各个目标序列片段的特征,并依此得到待处理行人序列的特征;基于各片段的特征计算待处理行人序列和参考行人序列之间的距离向量,并根据各个距离向量,获得待处理行人序列的差异性描述子;分别计算待处理行人序列的特征、差异性描述子和检索库中各个目标行人序列的特征、差