
基于多台交互最小二乘估计的弹道参数解算方法和系统.pdf

是立****92

1/10
2/10

3/10

4/10
5/10
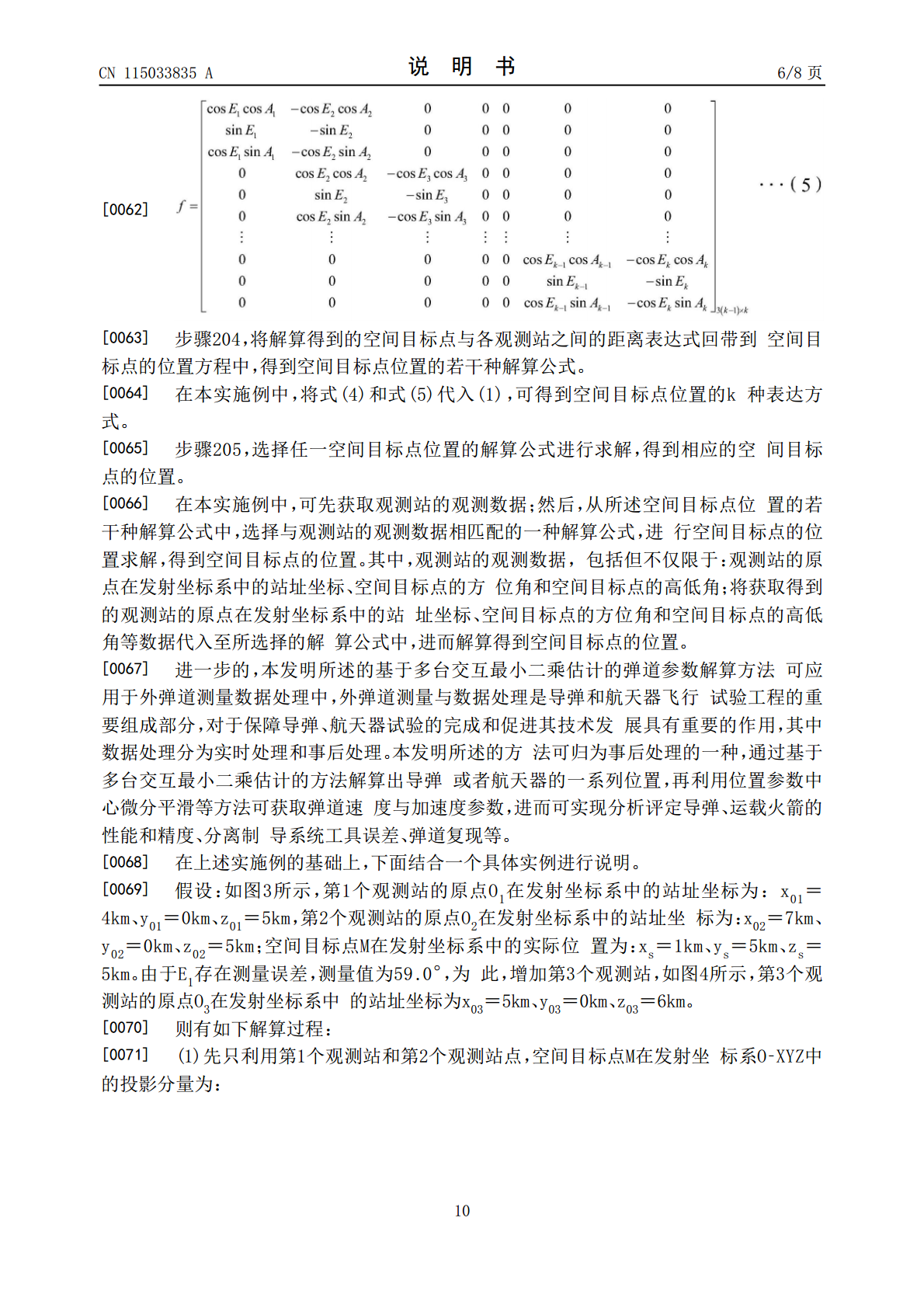
6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多台交互最小二乘估计的弹道参数解算方法和系统.pdf
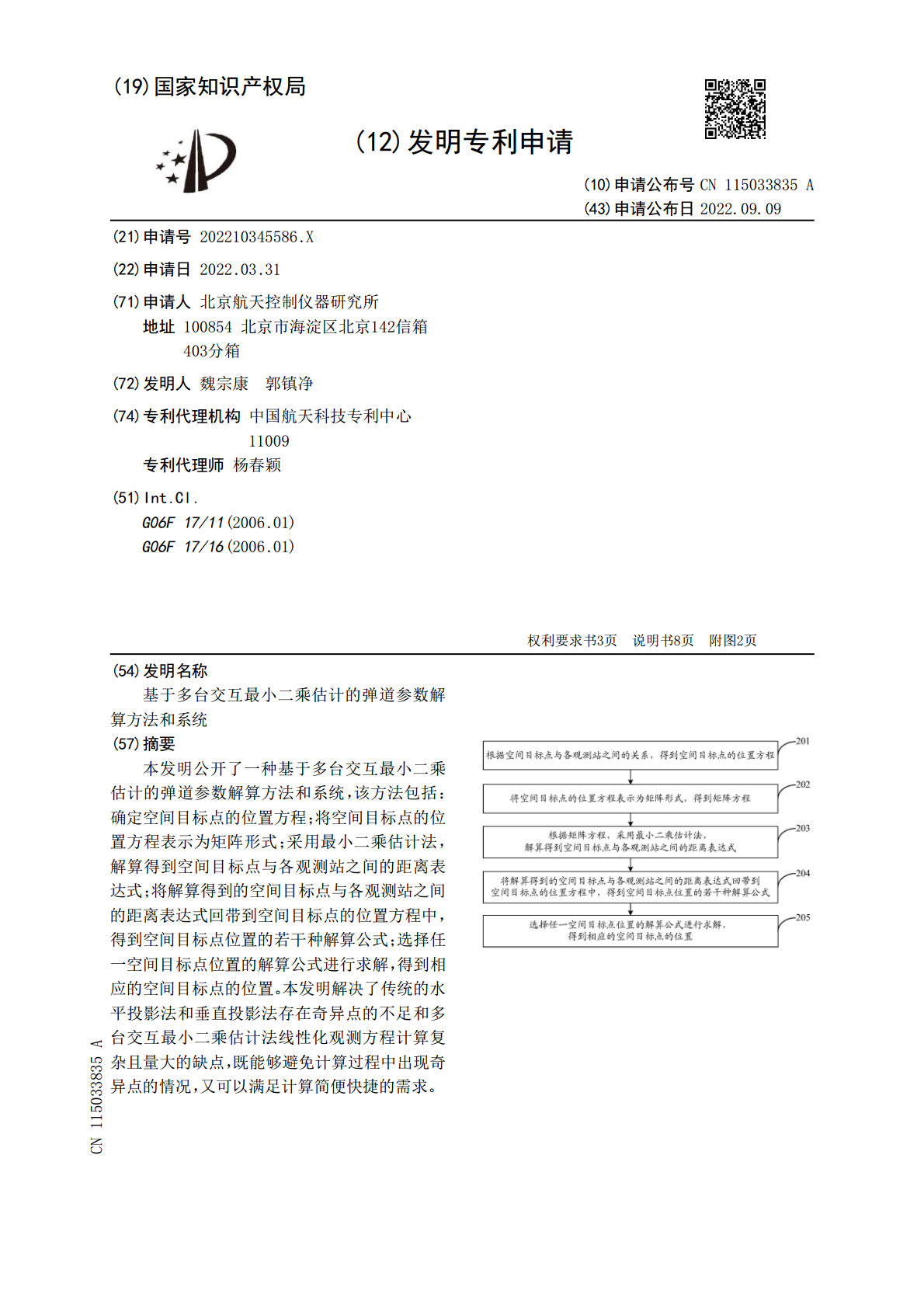
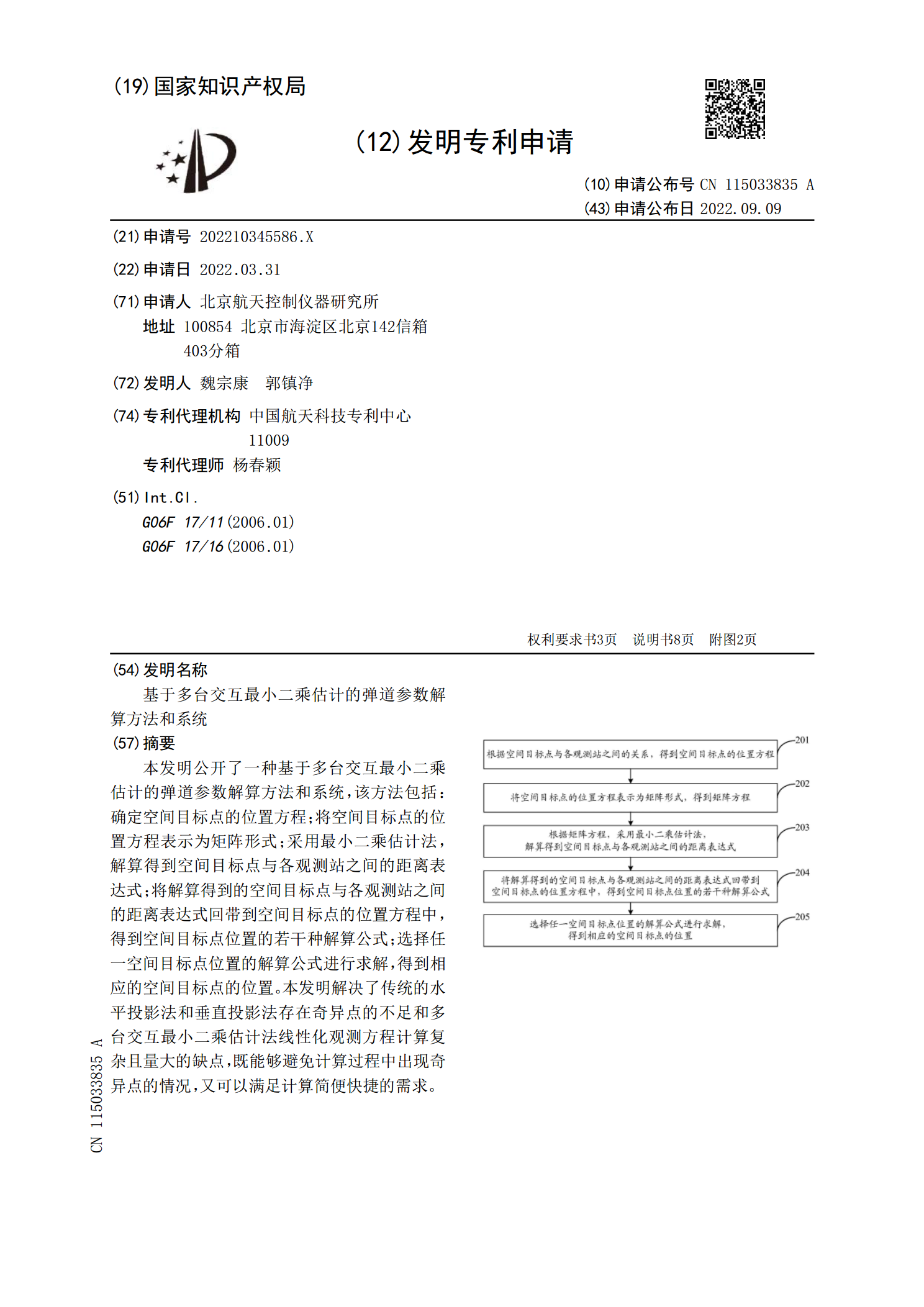
本发明公开了一种基于多台交互最小二乘估计的弹道参数解算方法和系统,该方法包括:确定空间目标点的位置方程;将空间目标点的位置方程表示为矩阵形式;采用最小二乘估计法,解算得到空间目标点与各观测站之间的距离表达式;将解算得到的空间目标点与各观测站之间的距离表达式回带到空间目标点的位置方程中,得到空间目标点位置的若干种解算公式;选择任一空间目标点位置的解算公式进行求解,得到相应的空间目标点的位置。本发明解决了传统的水平投影法和垂直投影法存在奇异点的不足和多台交互最小二乘估计法线性化观测方程计算复杂且量大的缺点,既

坐标转换四参数解算的整体最小二乘新方法.docx
坐标转换四参数解算的整体最小二乘新方法坐标转换是地理空间数据处理中的一项重要任务,常用于将不同空间参考系统下的坐标转换为另一空间参考系统下的坐标。在实际应用中,常常需要利用已知的控制点坐标,通过求解参数模型,将待转换的坐标转换到目标坐标系下。四参数解算是一种常用的坐标转换方法,通过平移、旋转和比例变换,可以实现较好的坐标转换效果。本文旨在介绍一种新的整体最小二乘方法来解决四参数坐标转换的问题。传统的四参数解算方法通常采用分步逐点法,即先进行平移和旋转的参数求解,然后再进行比例变换的参数求解。然而,这种分步

基于稳健估计的高精度坐标转换参数解算方法.docx
基于稳健估计的高精度坐标转换参数解算方法概述随着卫星定位技术的不断发展,地球空间坐标系统的准确度得到了显著提高。然而,由于不同地区使用的坐标系统存在不同,需要进行坐标转换。在实际工程应用中,高精度坐标转换参数解算是必要的,本文将讨论基于稳健估计的高精度坐标转换参数解算方法。关键词:高精度;坐标转换;稳健估计;解算方法简介高精度坐标转换参数解算是一种将坐标系转换为和别的坐标系兼容的方式,以便于不同地区的数据进行比较的技术。换言之,该技术允许不同的国家和地区使用不同的坐标系,但可以相互协调,以实现对数据进行分

基于噪声预估计的DPOAE最小二乘估计方法.docx
基于噪声预估计的DPOAE最小二乘估计方法基于噪声预估计的DPOAE最小二乘估计方法摘要二次至非线性失真声发射(DPOAE)是一种经典的听觉生理学评估工具。然而,在现实应用中,DPOAE的信号往往会受到噪声的污染,这对估计DPOAE的过程提出了挑战。本文提出了一种基于噪声预估计的DPOAE最小二乘估计方法,该方法通过预估噪声的参数,对DPOAE信号进行去噪并重新估计。实验证实,该方法在DPOAE估计过程中能够显著降低噪声干扰,提高估计的准确性和稳定性。关键词:DPOAE,最小二乘估计,噪声预估计,去噪引言

基于核偏最小二乘的电厂热力参数预测与估计.docx
基于核偏最小二乘的电厂热力参数预测与估计基于核偏最小二乘的电厂热力参数预测与估计摘要:热力参数是电厂运行过程中的重要指标,它对于电厂的热力系统的安全运行及效率提升有着重要作用。本文针对电厂热力参数的预测与估计问题,提出了一种基于核偏最小二乘的方法。通过对热力参数进行核映射,结合最小二乘法,可以有效地进行参数估计与预测。为验证方法的有效性,本文以某电厂的实测数据为例进行了实验,结果表明基于核偏最小二乘的方法能够较准确地估计和预测电厂的热力参数。关键词:核偏最小二乘;电厂热力参数;参数估计与预测;最小二乘法1