
行驶路况检测方法、装置、电子设备及可读存储介质.pdf

一只****呀9


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
行驶路况检测方法、装置、电子设备及可读存储介质.pdf
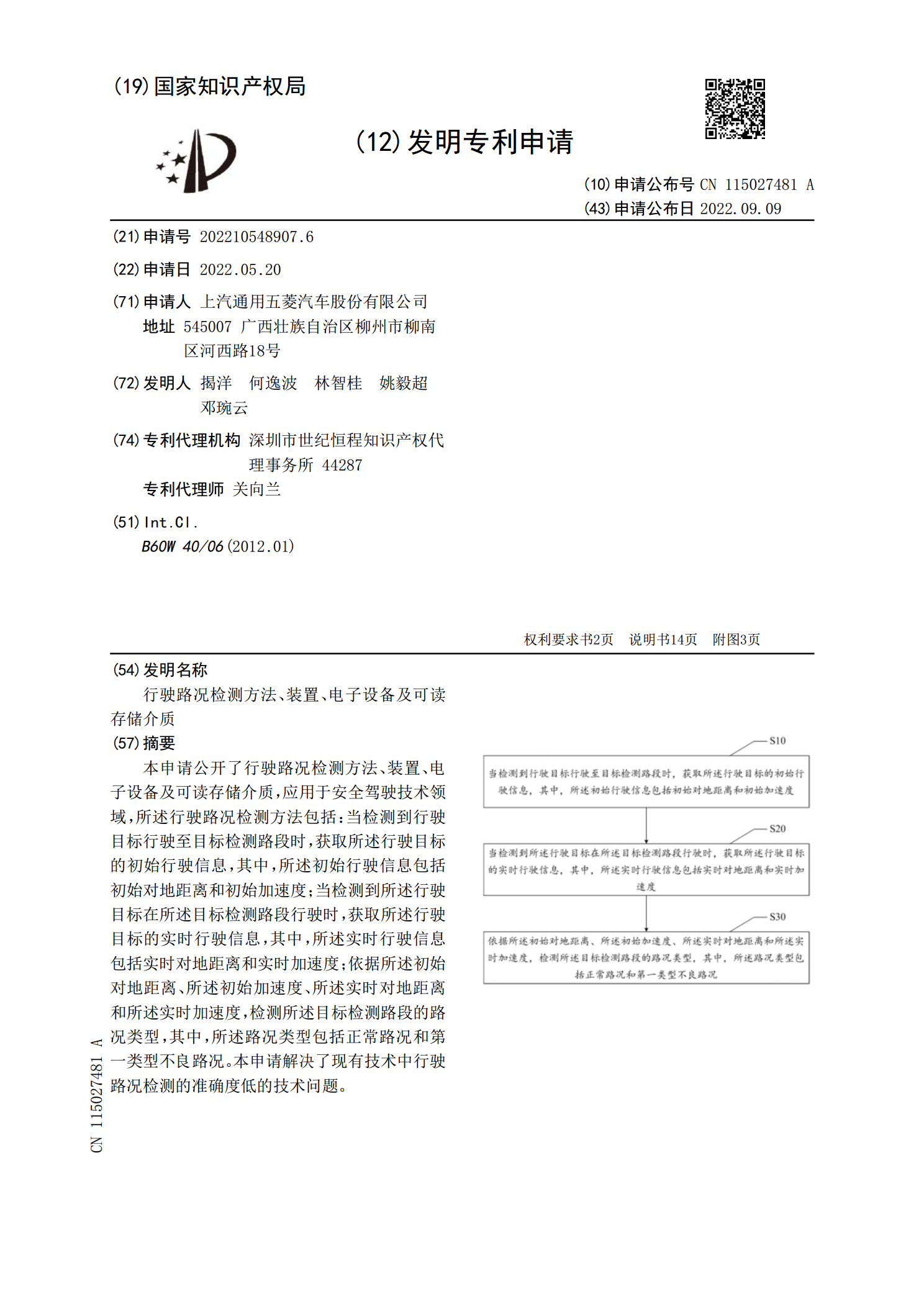
本申请公开了行驶路况检测方法、装置、电子设备及可读存储介质,应用于安全驾驶技术领域,所述行驶路况检测方法包括:当检测到行驶目标行驶至目标检测路段时,获取所述行驶目标的初始行驶信息,其中,所述初始行驶信息包括初始对地距离和初始加速度;当检测到所述行驶目标在所述目标检测路段行驶时,获取所述行驶目标的实时行驶信息,其中,所述实时行驶信息包括实时对地距离和实时加速度;依据所述初始对地距离、所述初始加速度、所述实时对地距离和所述实时加速度,检测所述目标检测路段的路况类型,其中,所述路况类型包括正常路况和第一类型不良
检测方法、装置、电子设备及可读存储介质.pdf
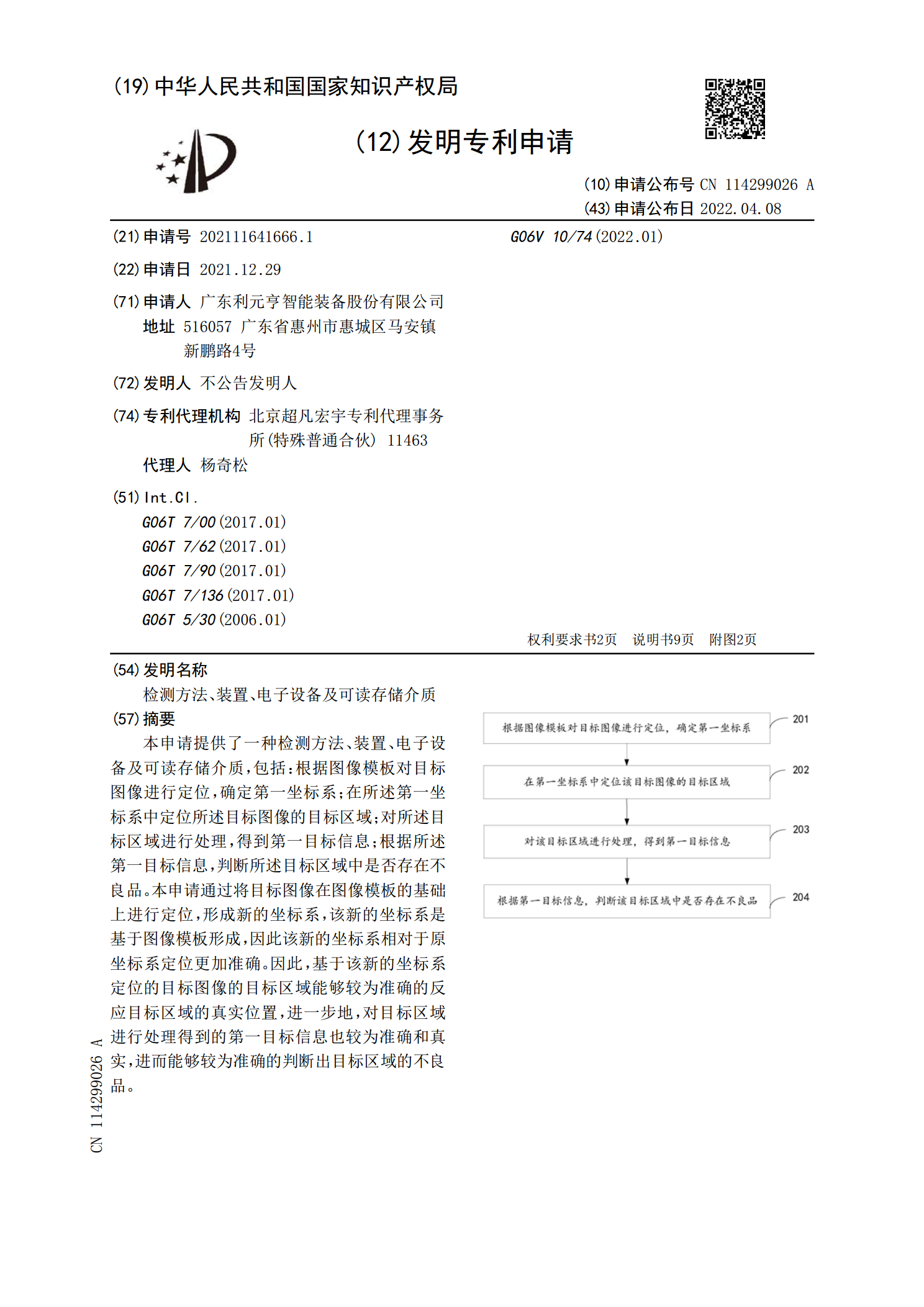
本申请提供了一种检测方法、装置、电子设备及可读存储介质,包括:根据图像模板对目标图像进行定位,确定第一坐标系;在所述第一坐标系中定位所述目标图像的目标区域;对所述目标区域进行处理,得到第一目标信息;根据所述第一目标信息,判断所述目标区域中是否存在不良品。本申请通过将目标图像在图像模板的基础上进行定位,形成新的坐标系,该新的坐标系是基于图像模板形成,因此该新的坐标系相对于原坐标系定位更加准确。因此,基于该新的坐标系定位的目标图像的目标区域能够较为准确的反应目标区域的真实位置,进一步地,对目标区域进行处理得到

车辆检测方法、装置、电子设备及可读存储介质.pdf
本申请提供一种车辆检测方法、装置、电子设备及可读存储介质,该方法包括:检测加油站的指定区域是否存在车辆进入;当检测到目标车辆进入所述指定区域时,获取所述目标车辆的车辆属性信息;其中,所述车辆属性信息包括车牌信息;定时检测所述目标车辆是否停留在所述指定区域;当确定所述目标车辆离开所述指定区域时,确定所述目标车辆在所述指定区域的停留时间。该方法可以实现对车辆在加油站的指定区域的停留时间的实时检测,提高了加油站车辆停留时间的统计效率。
设备检测方法、装置、电子设备及可读存储介质.pdf
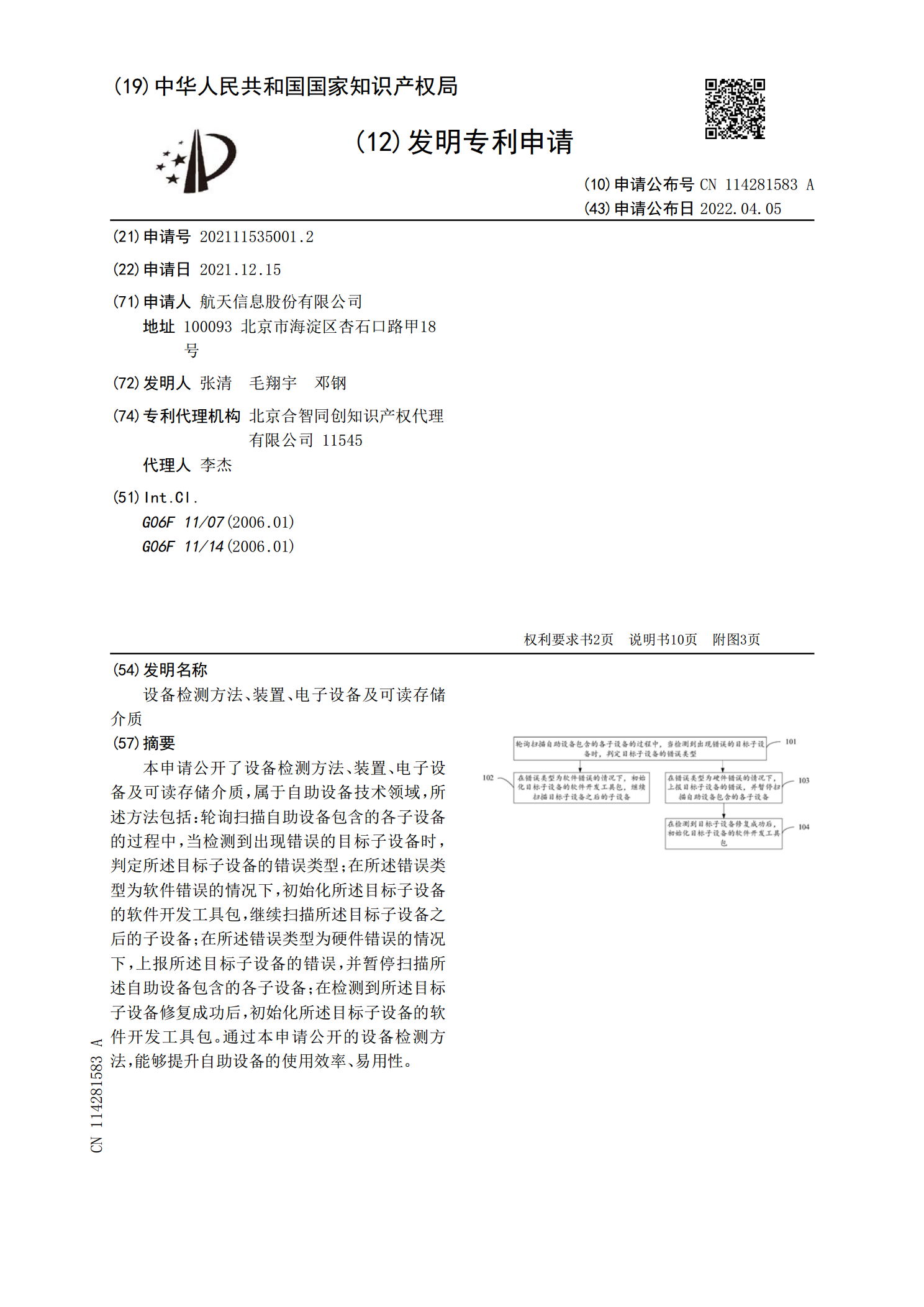
本申请公开了设备检测方法、装置、电子设备及可读存储介质,属于自助设备技术领域,所述方法包括:轮询扫描自助设备包含的各子设备的过程中,当检测到出现错误的目标子设备时,判定所述目标子设备的错误类型;在所述错误类型为软件错误的情况下,初始化所述目标子设备的软件开发工具包,继续扫描所述目标子设备之后的子设备;在所述错误类型为硬件错误的情况下,上报所述目标子设备的错误,并暂停扫描所述自助设备包含的各子设备;在检测到所述目标子设备修复成功后,初始化所述目标子设备的软件开发工具包。通过本申请公开的设备检测方法,能够提升
数据检测方法、装置、电子设备及可读存储介质.pdf
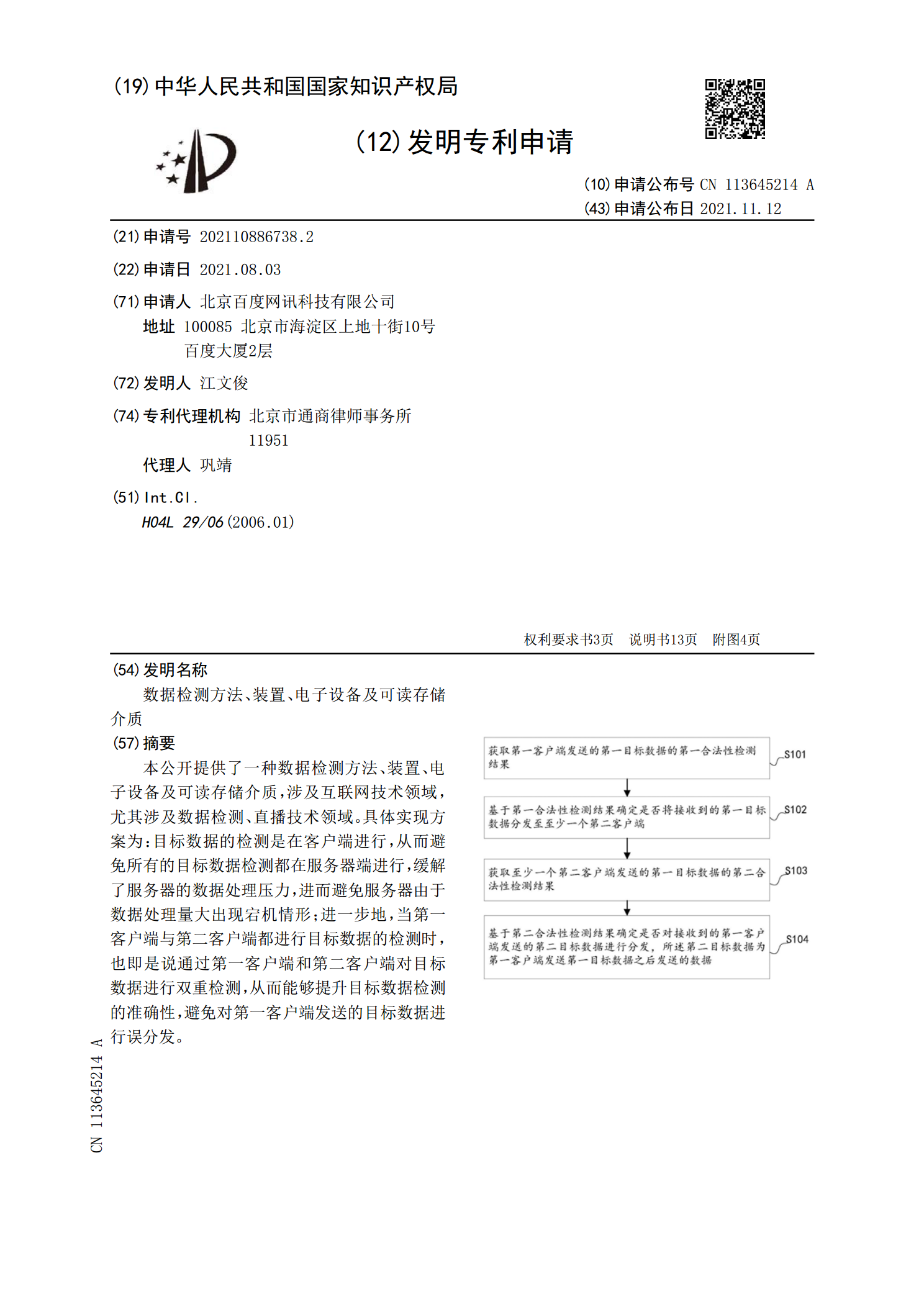
本公开提供了一种数据检测方法、装置、电子设备及可读存储介质,涉及互联网技术领域,尤其涉及数据检测、直播技术领域。具体实现方案为:目标数据的检测是在客户端进行,从而避免所有的目标数据检测都在服务器端进行,缓解了服务器的数据处理压力,进而避免服务器由于数据处理量大出现宕机情形;进一步地,当第一客户端与第二客户端都进行目标数据的检测时,也即是说通过第一客户端和第二客户端对目标数据进行双重检测,从而能够提升目标数据检测的准确性,避免对第一客户端发送的目标数据进行误分发。