
屏幕调光方法、装置、电子设备及存储介质.pdf

Ro****44


1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

屏幕调光方法、装置、电子设备及存储介质.pdf
本申请公开一种屏幕调光方法、装置、电子设备及存储介质,属于电子设备技术领域,该方法包括:获取电子设备在运动过程中相对于前向光源的实时位置信息,以及通过前置光敏传感器获取各实时位置信息下前向光源的实时光强;在电子设备进入前向光源的调光失效范围之前,根据进入调光失效范围之前获取到的第一实时位置信息和对应的实时光强,确定前向光源的目标光源功率;在电子设备进入调光失效范围之后,对于进入调光失效范围之后获取到的每个第二实时位置信息,根据目标光源功率和第二实时位置信息,确定第二实时位置信息对应的调光补偿光强;根据第二
屏幕显示方法、装置、电子设备及存储介质.pdf
本发明公开了一种屏幕显示方法、装置、电子设备及存储介质,屏幕显示方法包括:在显示屏上显示当前播放对象的情况下,基于用户的第一输入在所述显示屏上设置聚焦显示框,并复制所述当前播放对象获得第一播放对象;在所述聚焦显示框内显示所述第一播放对象的部分内容。本发明,可以通过在当前播放对象中设置的聚焦显示框中显示出任意的目标内容,具有操作简单,对比效果突出的优点。
屏幕录制方法、装置、电子设备及存储介质.pdf
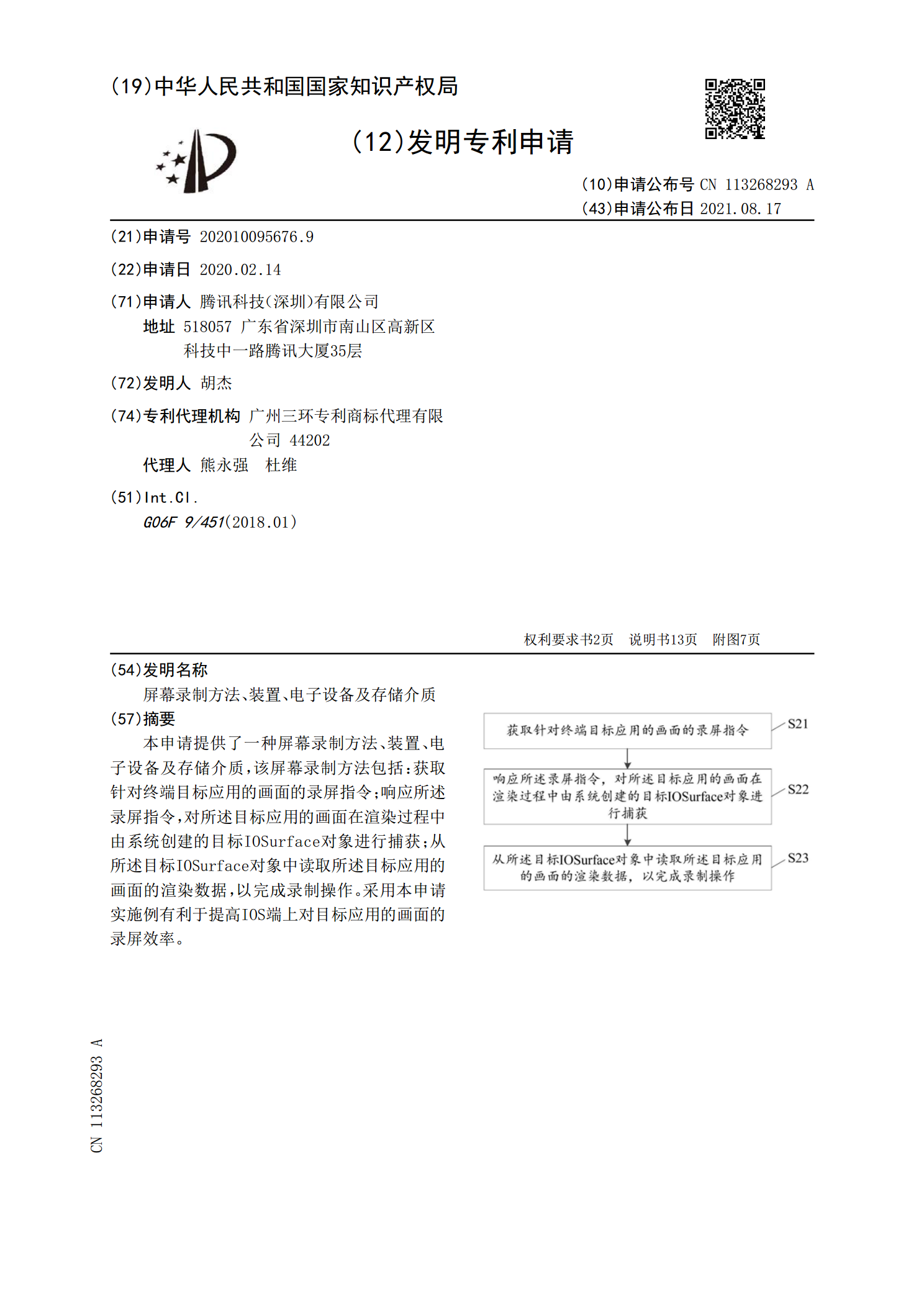
本申请提供了一种屏幕录制方法、装置、电子设备及存储介质,该屏幕录制方法包括:获取针对终端目标应用的画面的录屏指令;响应所述录屏指令,对所述目标应用的画面在渲染过程中由系统创建的目标IOSurface对象进行捕获;从所述目标IOSurface对象中读取所述目标应用的画面的渲染数据,以完成录制操作。采用本申请实施例有利于提高IOS端上对目标应用的画面的录屏效率。
屏幕控制方法、装置、电子设备及存储介质.pdf
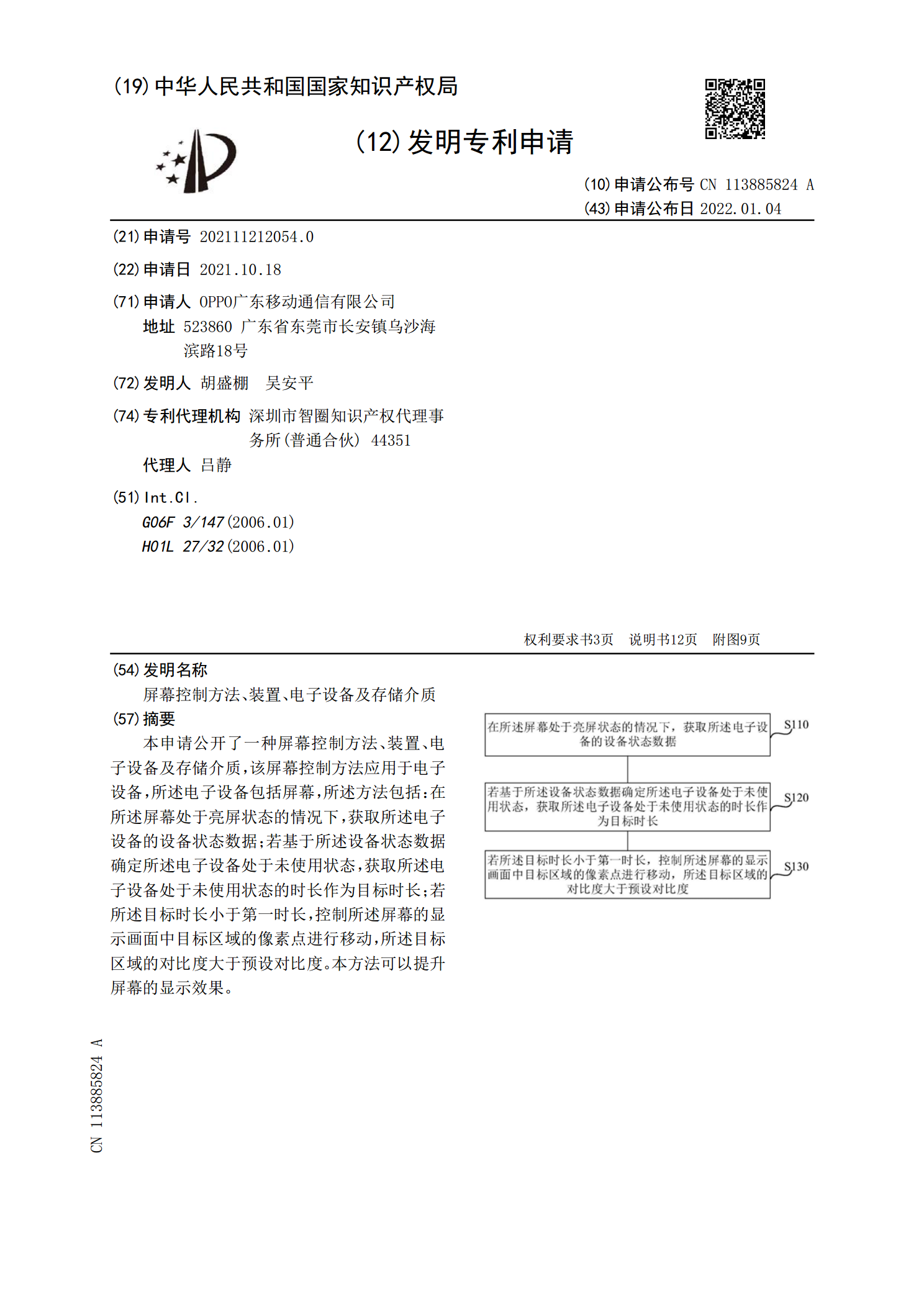
本申请公开了一种屏幕控制方法、装置、电子设备及存储介质,该屏幕控制方法应用于电子设备,所述电子设备包括屏幕,所述方法包括:在所述屏幕处于亮屏状态的情况下,获取所述电子设备的设备状态数据;若基于所述设备状态数据确定所述电子设备处于未使用状态,获取所述电子设备处于未使用状态的时长作为目标时长;若所述目标时长小于第一时长,控制所述屏幕的显示画面中目标区域的像素点进行移动,所述目标区域的对比度大于预设对比度。本方法可以提升屏幕的显示效果。

屏幕渲染方法、装置、电子设备及存储介质.pdf
本公开关于一种屏幕渲染方法、装置、电子设备及存储介质,屏幕渲染方法包括:从服务端接收渲染数据,其中,渲染数据包括多个标签数据和每个标签数据对应的渲染内容数据,多个标签数据呈树状结构;响应于接收到对当前屏幕进行渲染的指令,从位置记录信息中获取用于本次渲染的起始位置信息;基于用于本次渲染的起始位置信息,确定本次渲染的起始标签数据;基于本次渲染的起始标签数据以及树状结构,从多个标签数据中获取预设数量个标签数据;利用预设数量个标签数据中每个标签数据对应的渲染内容数据,渲染当前屏幕。本公开可实现按需进行渲染,减少浏