
连续体机器人路径规划方法、装置、电子设备及存储介质.pdf

春岚****23


1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
连续体机器人路径规划方法、装置、电子设备及存储介质.pdf
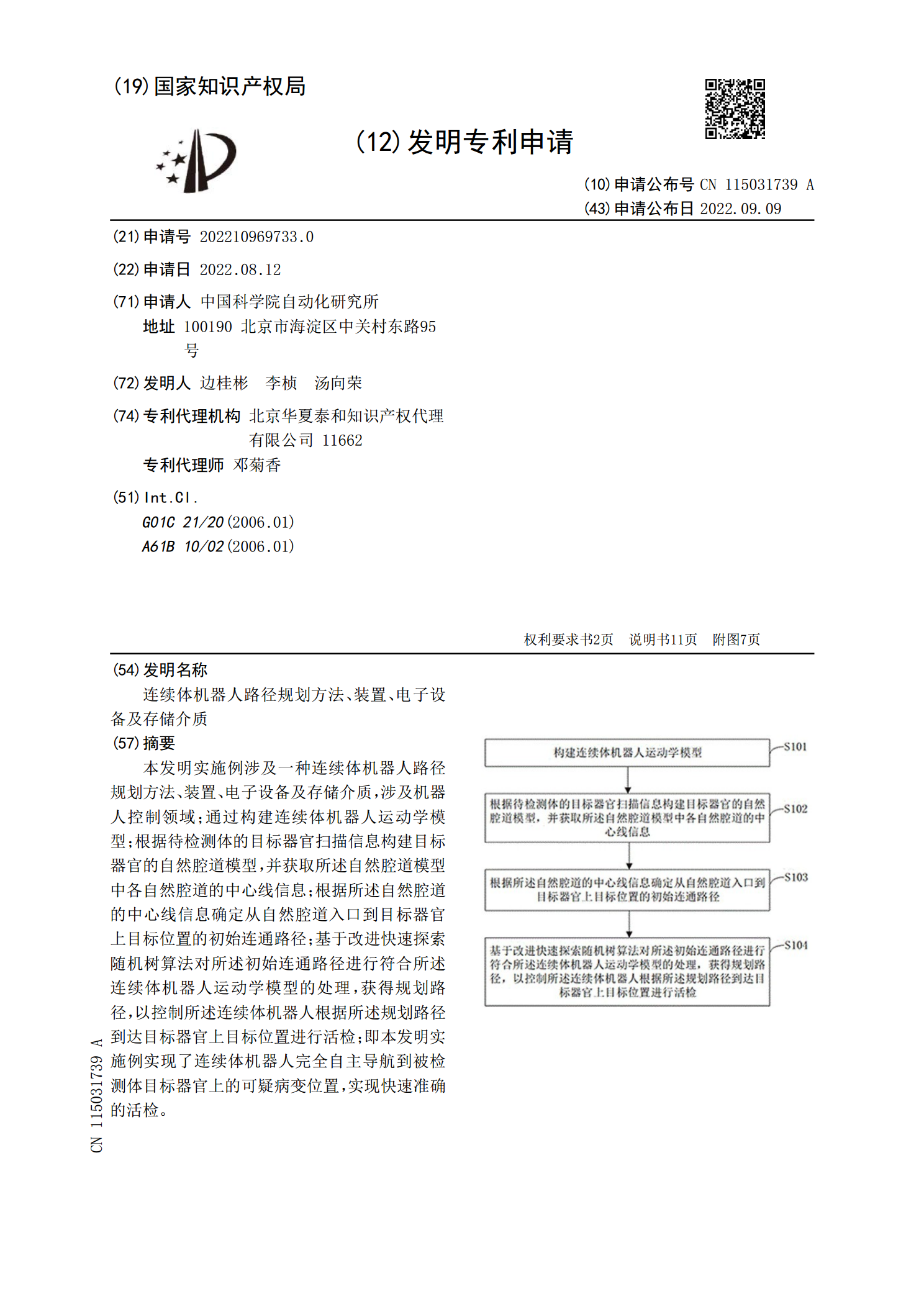
本发明实施例涉及一种连续体机器人路径规划方法、装置、电子设备及存储介质,涉及机器人控制领域;通过构建连续体机器人运动学模型;根据待检测体的目标器官扫描信息构建目标器官的自然腔道模型,并获取所述自然腔道模型中各自然腔道的中心线信息;根据所述自然腔道的中心线信息确定从自然腔道入口到目标器官上目标位置的初始连通路径;基于改进快速探索随机树算法对所述初始连通路径进行符合所述连续体机器人运动学模型的处理,获得规划路径,以控制所述连续体机器人根据所述规划路径到达目标器官上目标位置进行活检;即本发明实施例实现了连续体机
路径规划方法、装置、电子设备及存储介质.pdf
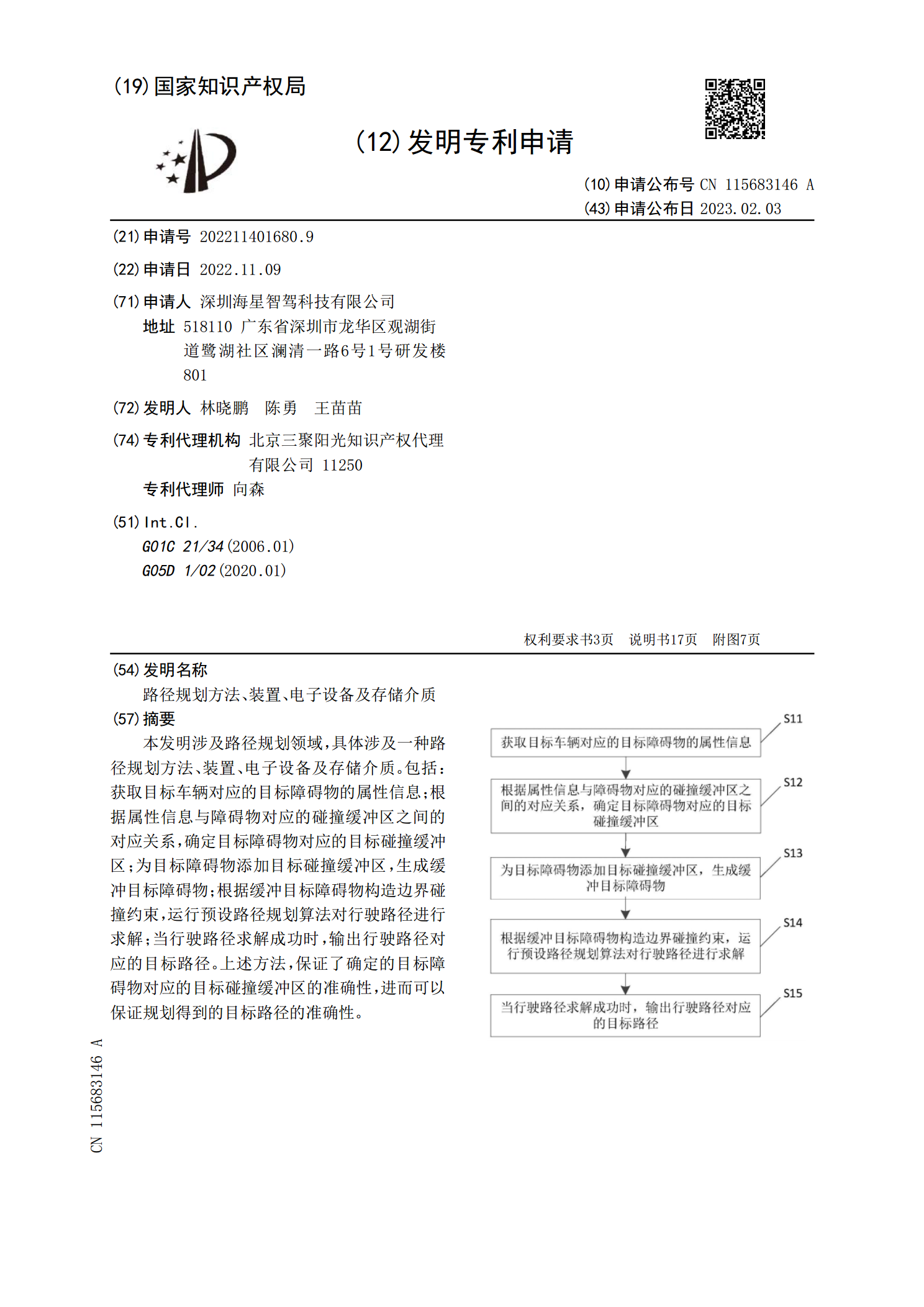
本发明涉及路径规划领域,具体涉及一种路径规划方法、装置、电子设备及存储介质。包括:获取目标车辆对应的目标障碍物的属性信息;根据属性信息与障碍物对应的碰撞缓冲区之间的对应关系,确定目标障碍物对应的目标碰撞缓冲区;为目标障碍物添加目标碰撞缓冲区,生成缓冲目标障碍物;根据缓冲目标障碍物构造边界碰撞约束,运行预设路径规划算法对行驶路径进行求解;当行驶路径求解成功时,输出行驶路径对应的目标路径。上述方法,保证了确定的目标障碍物对应的目标碰撞缓冲区的准确性,进而可以保证规划得到的目标路径的准确性。
路径规划的方法、装置、存储介质及电子设备.pdf
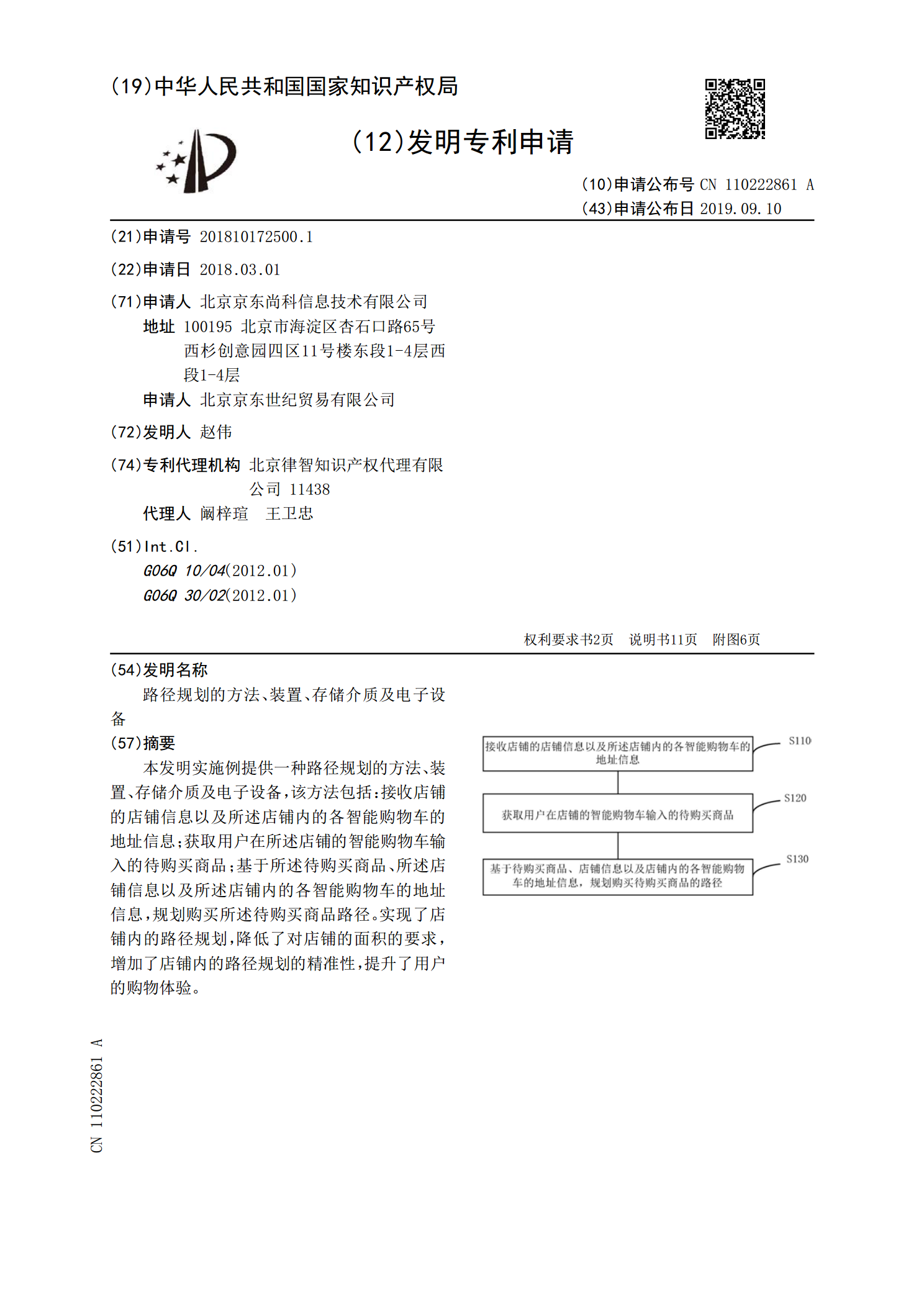
本发明实施例提供一种路径规划的方法、装置、存储介质及电子设备,该方法包括:接收店铺的店铺信息以及所述店铺内的各智能购物车的地址信息;获取用户在所述店铺的智能购物车输入的待购买商品;基于所述待购买商品、所述店铺信息以及所述店铺内的各智能购物车的地址信息,规划购买所述待购买商品路径。实现了店铺内的路径规划,降低了对店铺的面积的要求,增加了店铺内的路径规划的精准性,提升了用户的购物体验。
路径规划方法、装置、电子设备及存储介质.pdf
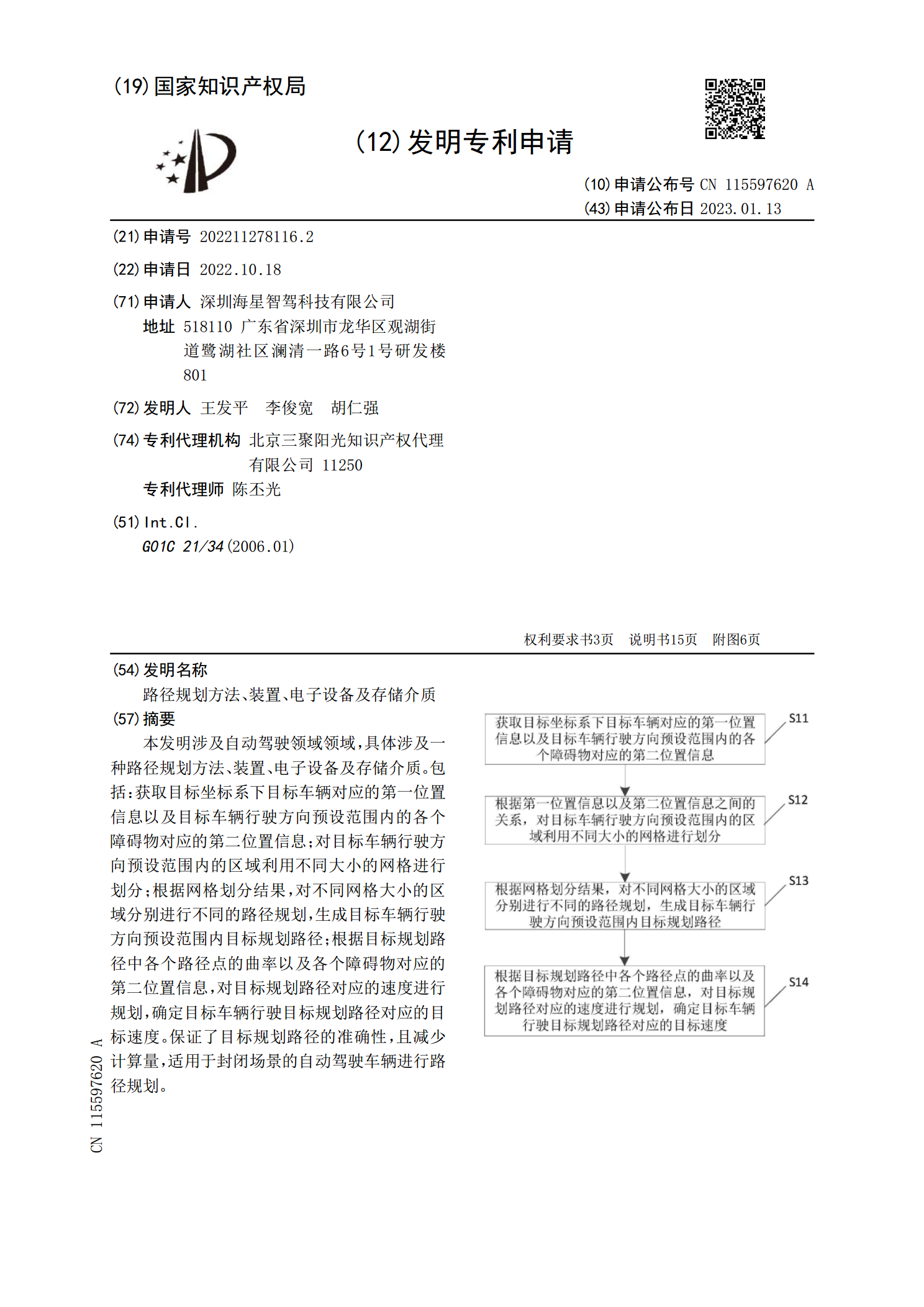
本发明涉及自动驾驶领域领域,具体涉及一种路径规划方法、装置、电子设备及存储介质。包括:获取目标坐标系下目标车辆对应的第一位置信息以及目标车辆行驶方向预设范围内的各个障碍物对应的第二位置信息;对目标车辆行驶方向预设范围内的区域利用不同大小的网格进行划分;根据网格划分结果,对不同网格大小的区域分别进行不同的路径规划,生成目标车辆行驶方向预设范围内目标规划路径;根据目标规划路径中各个路径点的曲率以及各个障碍物对应的第二位置信息,对目标规划路径对应的速度进行规划,确定目标车辆行驶目标规划路径对应的目标速度。保证了
路径规划方法、装置、电子设备及存储介质.pdf
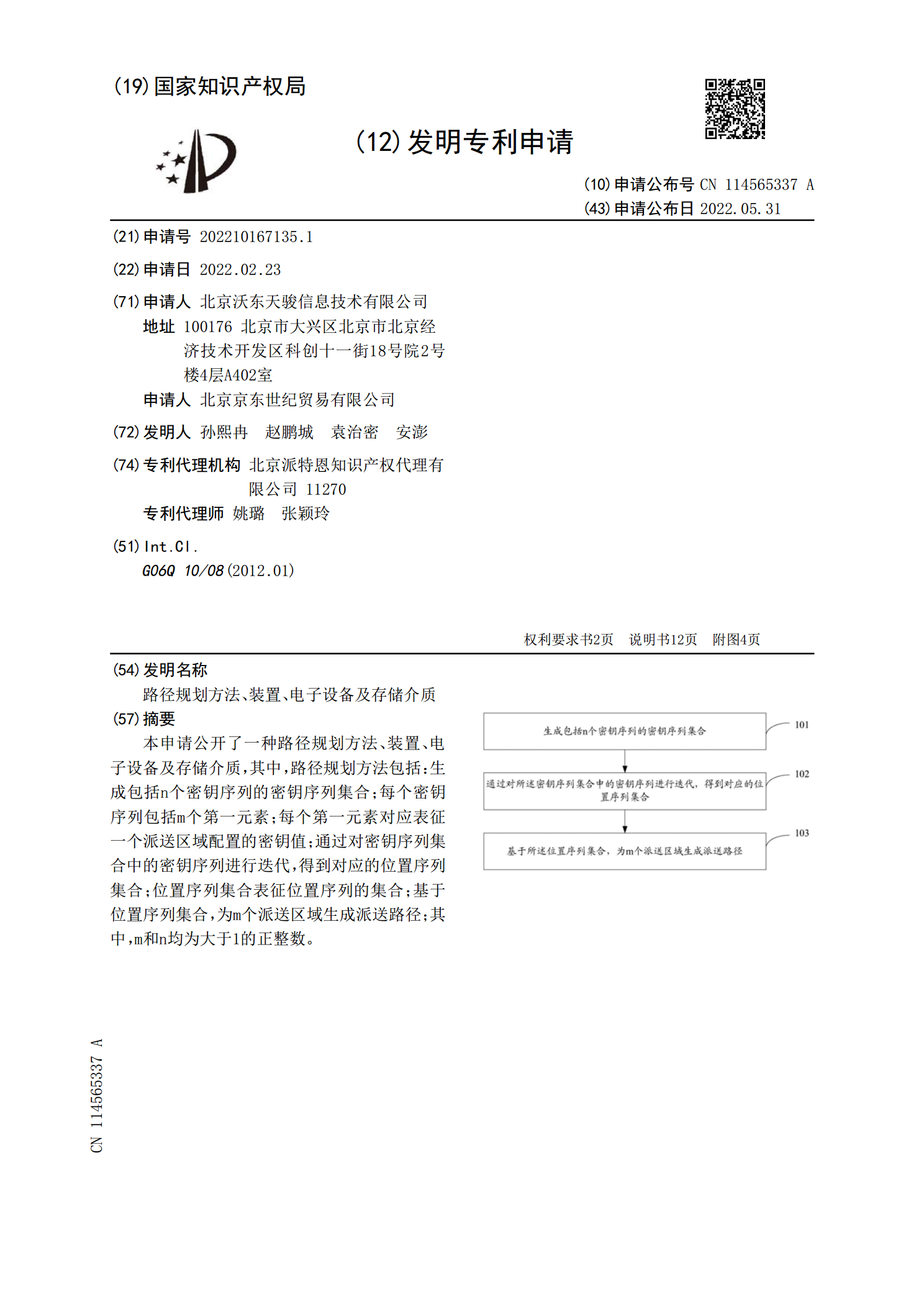
本申请公开了一种路径规划方法、装置、电子设备及存储介质,其中,路径规划方法包括:生成包括n个密钥序列的密钥序列集合;每个密钥序列包括m个第一元素;每个第一元素对应表征一个派送区域配置的密钥值;通过对密钥序列集合中的密钥序列进行迭代,得到对应的位置序列集合;位置序列集合表征位置序列的集合;基于位置序列集合,为m个派送区域生成派送路径;其中,m和n均为大于1的正整数。