
毫米波雷达的目标检测方法、装置和手持终端.pdf

婀娜****aj

1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
毫米波雷达的目标检测方法、装置和手持终端.pdf
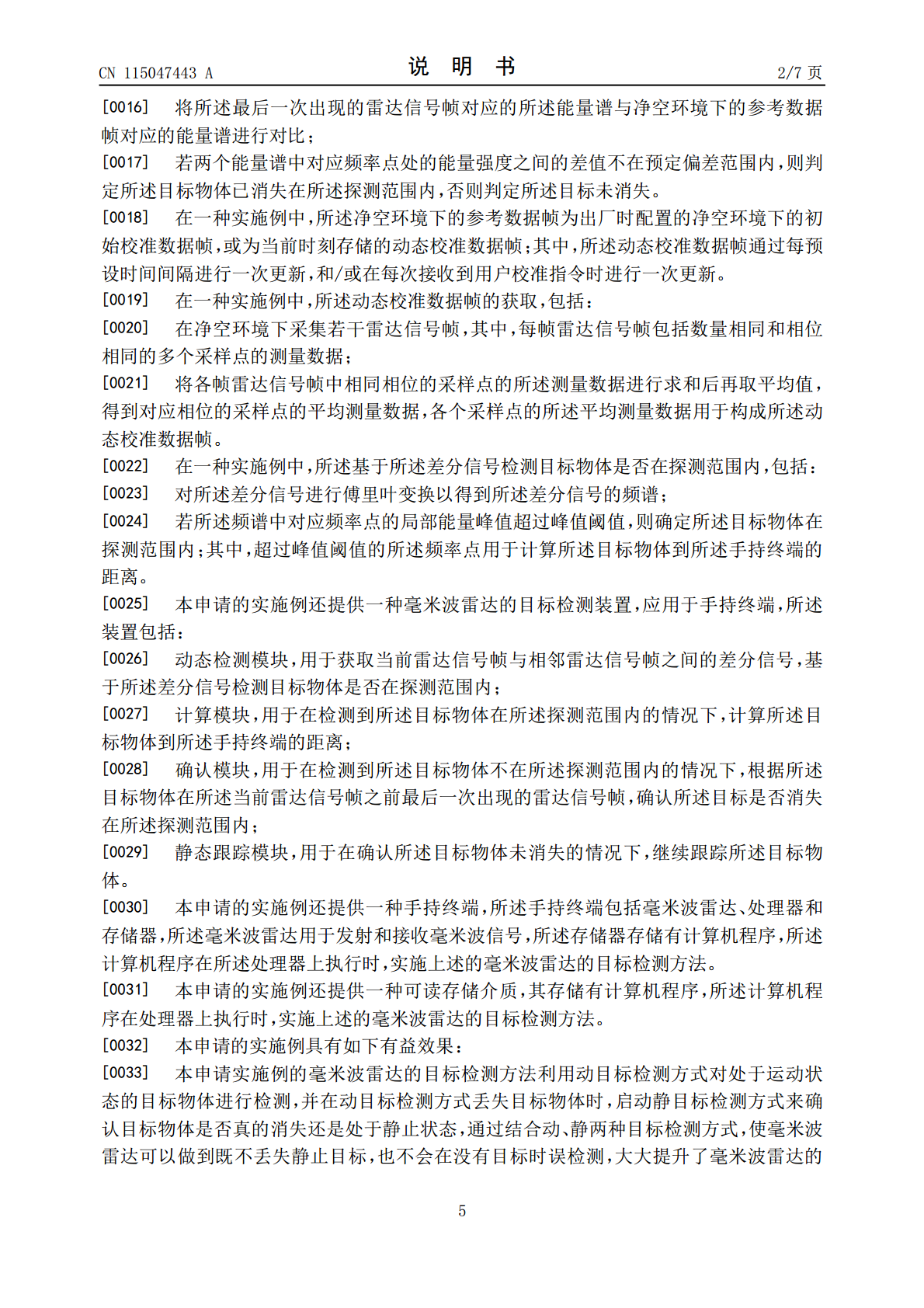
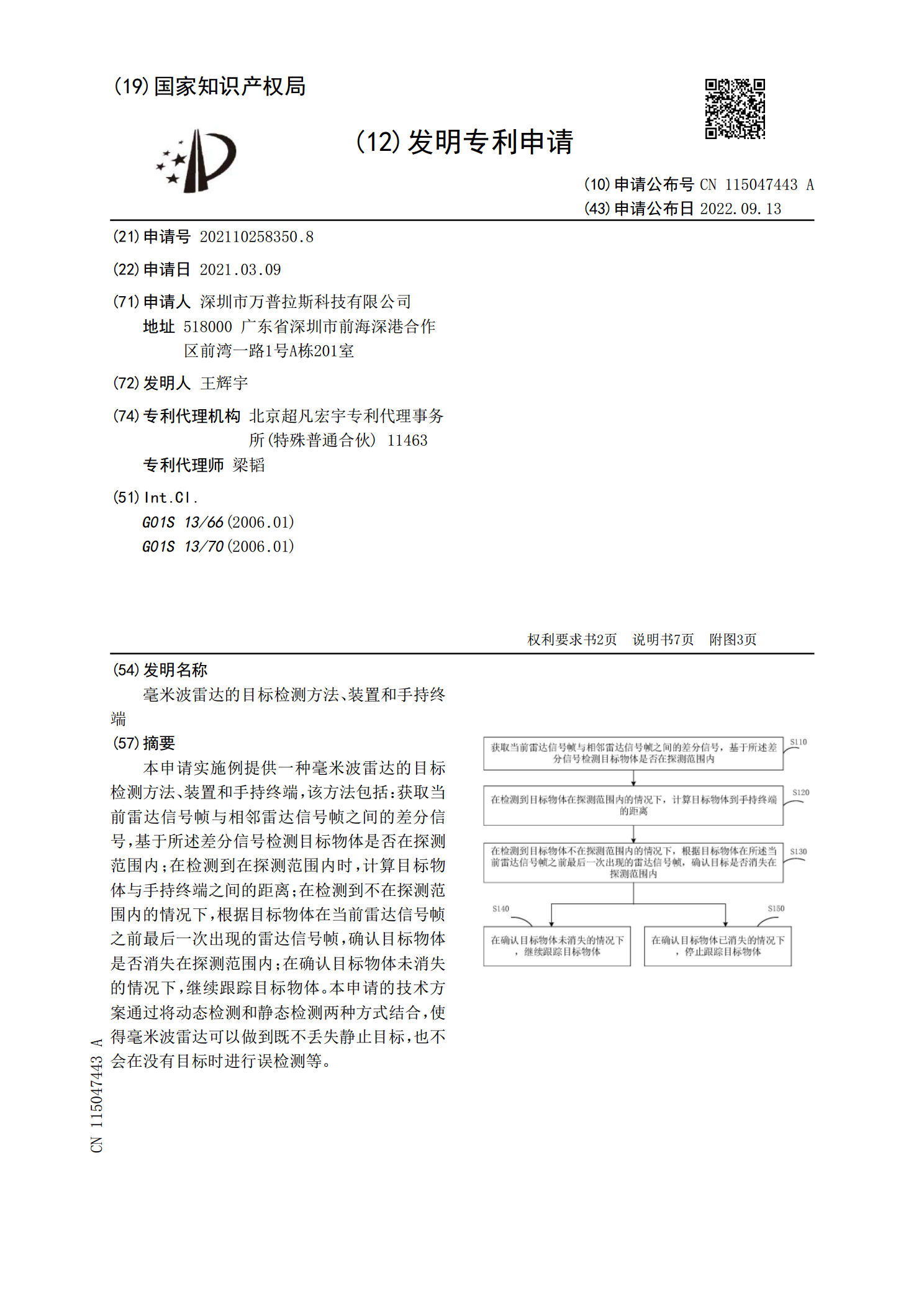
本申请实施例提供一种毫米波雷达的目标检测方法、装置和手持终端,该方法包括:获取当前雷达信号帧与相邻雷达信号帧之间的差分信号,基于所述差分信号检测目标物体是否在探测范围内;在检测到在探测范围内时,计算目标物体与手持终端之间的距离;在检测到不在探测范围内的情况下,根据目标物体在当前雷达信号帧之前最后一次出现的雷达信号帧,确认目标物体是否消失在探测范围内;在确认目标物体未消失的情况下,继续跟踪目标物体。本申请的技术方案通过将动态检测和静态检测两种方式结合,使得毫米波雷达可以做到既不丢失静止目标,也不会在没有目标
毫米波雷达的动态校准方法、装置和手持终端.pdf
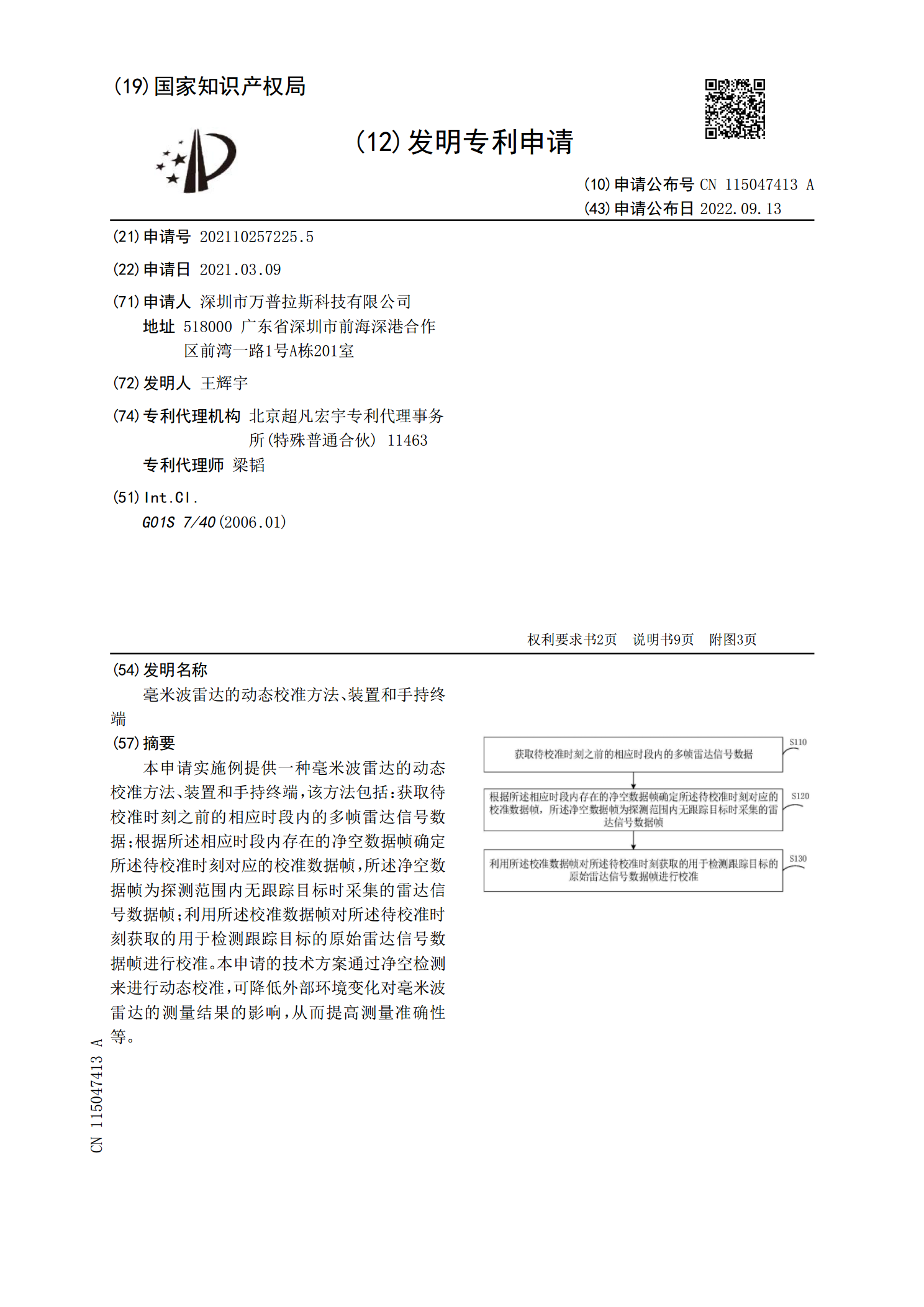
本申请实施例提供一种毫米波雷达的动态校准方法、装置和手持终端,该方法包括:获取待校准时刻之前的相应时段内的多帧雷达信号数据;根据所述相应时段内存在的净空数据帧确定所述待校准时刻对应的校准数据帧,所述净空数据帧为探测范围内无跟踪目标时采集的雷达信号数据帧;利用所述校准数据帧对所述待校准时刻获取的用于检测跟踪目标的原始雷达信号数据帧进行校准。本申请的技术方案通过净空检测来进行动态校准,可降低外部环境变化对毫米波雷达的测量结果的影响,从而提高测量准确性等。
毫米波雷达性能测试的方法、装置、存储介质和终端.pdf
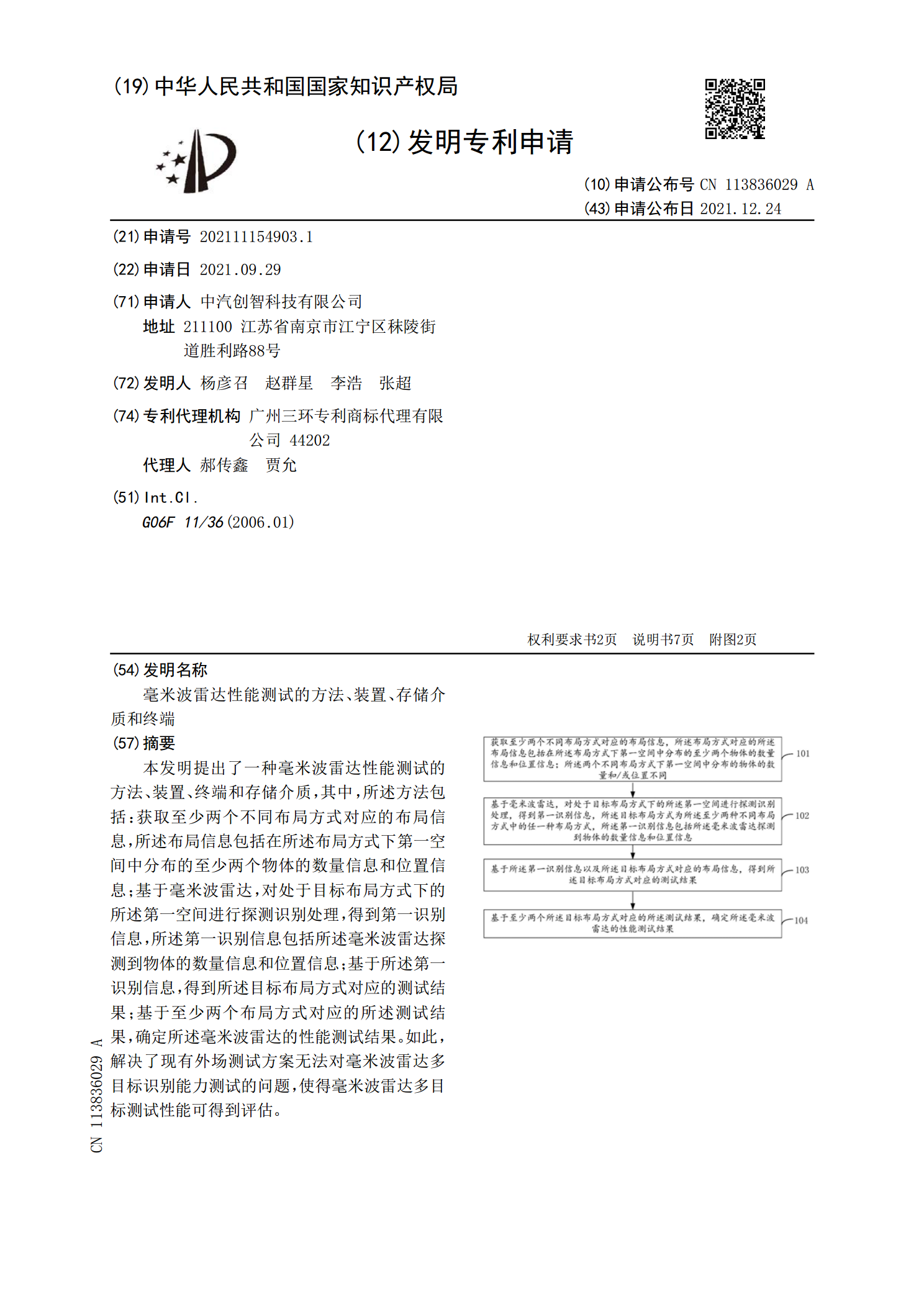
本发明提出了一种毫米波雷达性能测试的方法、装置、终端和存储介质,其中,所述方法包括:获取至少两个不同布局方式对应的布局信息,所述布局信息包括在所述布局方式下第一空间中分布的至少两个物体的数量信息和位置信息;基于毫米波雷达,对处于目标布局方式下的所述第一空间进行探测识别处理,得到第一识别信息,所述第一识别信息包括所述毫米波雷达探测到物体的数量信息和位置信息;基于所述第一识别信息,得到所述目标布局方式对应的测试结果;基于至少两个布局方式对应的所述测试结果,确定所述毫米波雷达的性能测试结果。如此,解决了现有外场

毫米波雷达及基于毫米波雷达的目标检测方法.pdf
本发明提供一种毫米波雷达及基于毫米波雷达的目标检测方法。毫米波雷达包括主片雷达和从片雷达,主片雷达包括第一芯片以及与第一芯片耦接的4根发射天线以及4根第一接收天线;从片雷达包括第二芯片以及与第二芯片耦接的4根第二接收天线;其中,4根发射天线沿第一方向等间距设置;4根第一接收天线沿在4根发射天线的第一侧第一方向依次排布,4根第二接收天线在4根发射天线的第二侧沿第一方向依次排布;4根发射天线、4根第一接收天线以及4根第二接收天线的控制时序相同,且4根发射天线发送的毫米波的相位依次间隔45度。
毫米波雷达测量方法和装置.pdf
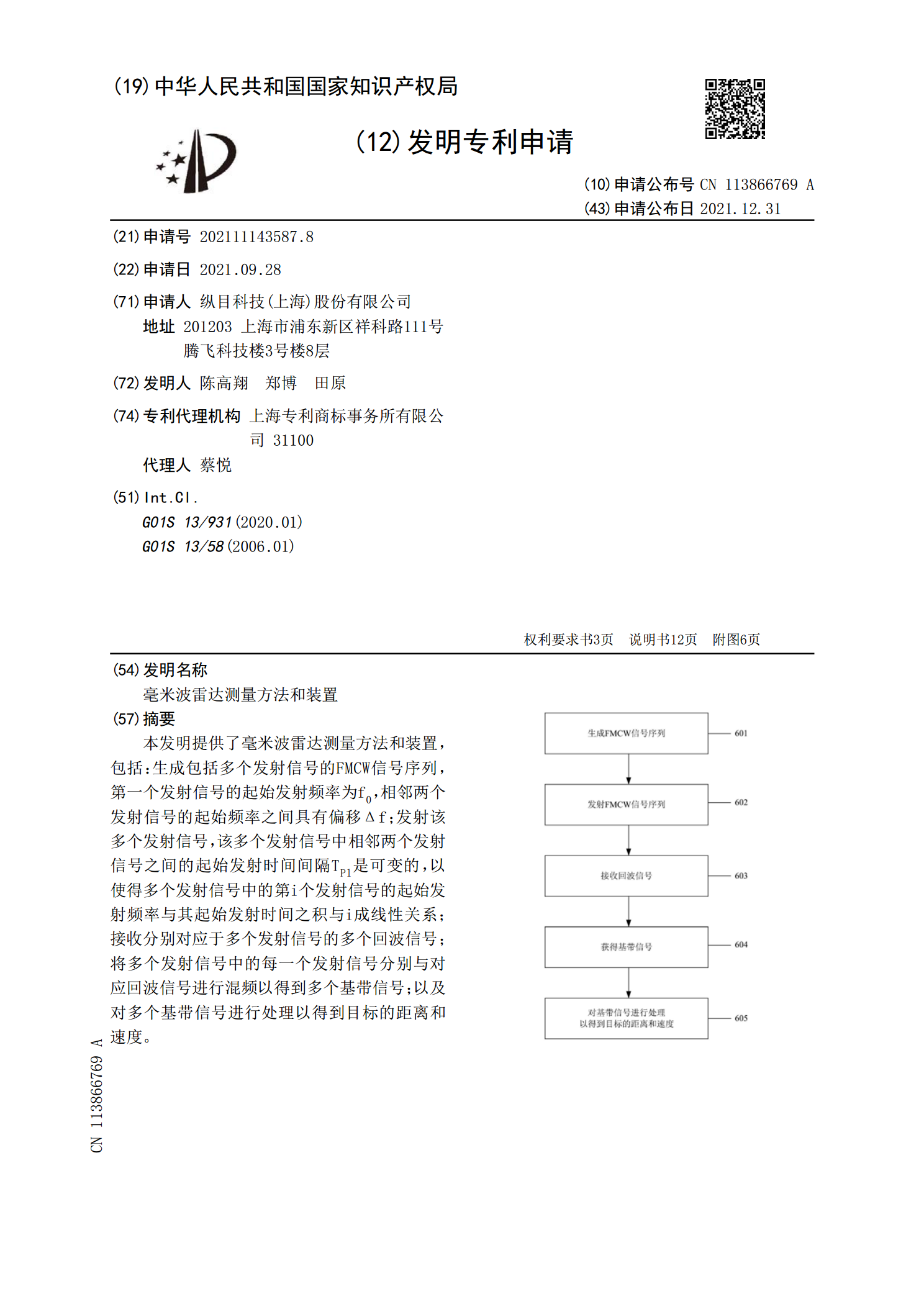
本发明提供了毫米波雷达测量方法和装置,包括:生成包括多个发射信号的FMCW信号序列,第一个发射信号的起始发射频率为f