
散焦深度测量方法、装置、电子设备及存储介质.pdf

论文****酱吖

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
散焦深度测量方法、装置、电子设备及存储介质.pdf
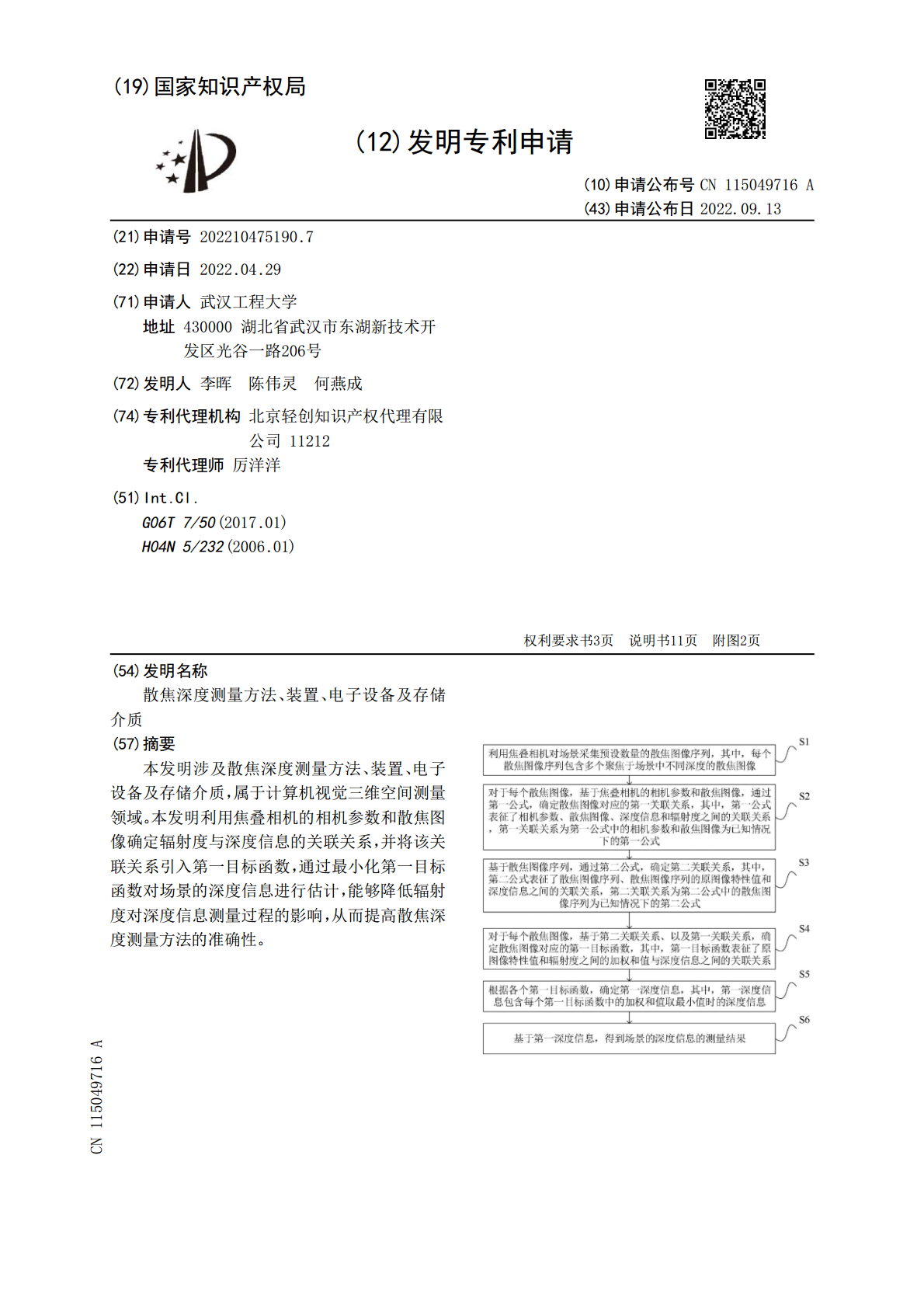
本发明涉及散焦深度测量方法、装置、电子设备及存储介质,属于计算机视觉三维空间测量领域。本发明利用焦叠相机的相机参数和散焦图像确定辐射度与深度信息的关联关系,并将该关联关系引入第一目标函数,通过最小化第一目标函数对场景的深度信息进行估计,能够降低辐射度对深度信息测量过程的影响,从而提高散焦深度测量方法的准确性。
形变测量方法、装置、电子设备及存储介质.pdf
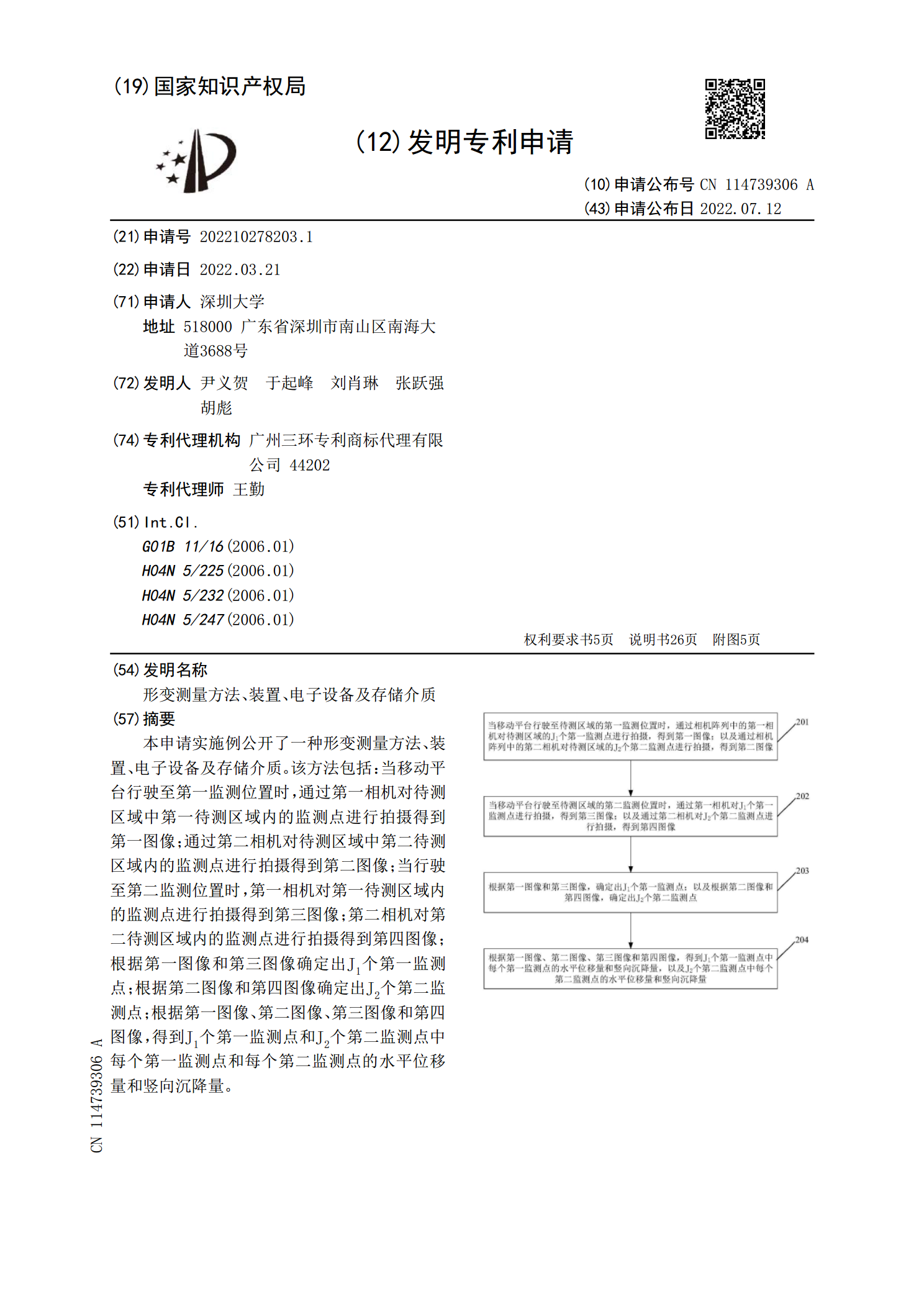
本申请实施例公开了一种形变测量方法、装置、电子设备及存储介质。该方法包括:当移动平台行驶至第一监测位置时,通过第一相机对待测区域中第一待测区域内的监测点进行拍摄得到第一图像;通过第二相机对待测区域中第二待测区域内的监测点进行拍摄得到第二图像;当行驶至第二监测位置时,第一相机对第一待测区域内的监测点进行拍摄得到第三图像;第二相机对第二待测区域内的监测点进行拍摄得到第四图像;根据第一图像和第三图像确定出J<base:Sub>1</base:Sub>个第一监测点;根据第二图像和第四图像确定出J<base:Sub
温度测量方法、装置、存储介质及电子设备.pdf
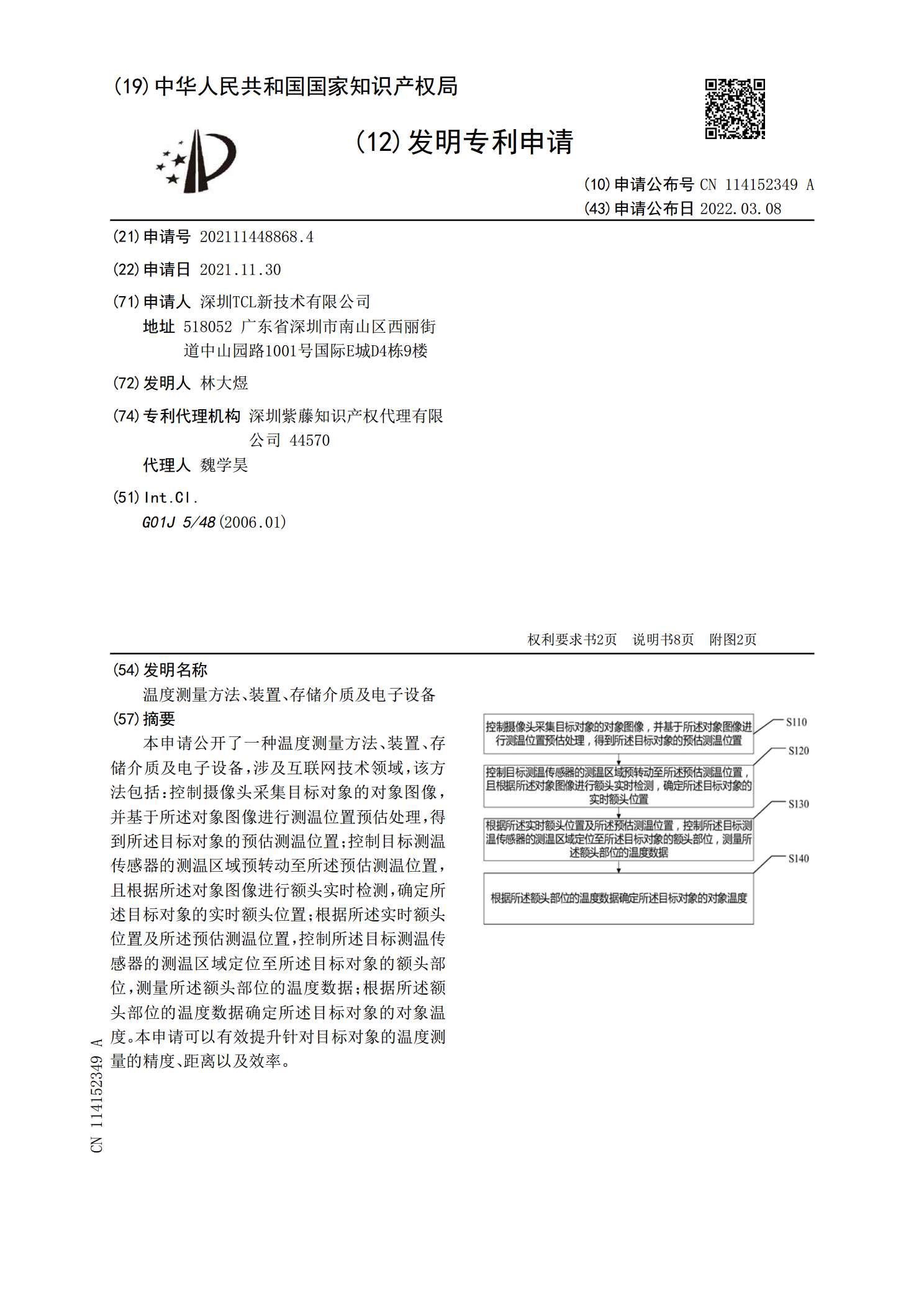
本申请公开了一种温度测量方法、装置、存储介质及电子设备,涉及互联网技术领域,该方法包括:控制摄像头采集目标对象的对象图像,并基于所述对象图像进行测温位置预估处理,得到所述目标对象的预估测温位置;控制目标测温传感器的测温区域预转动至所述预估测温位置,且根据所述对象图像进行额头实时检测,确定所述目标对象的实时额头位置;根据所述实时额头位置及所述预估测温位置,控制所述目标测温传感器的测温区域定位至所述目标对象的额头部位,测量所述额头部位的温度数据;根据所述额头部位的温度数据确定所述目标对象的对象温度。本申请可以
网络测量方法、装置、电子设备及存储介质.pdf
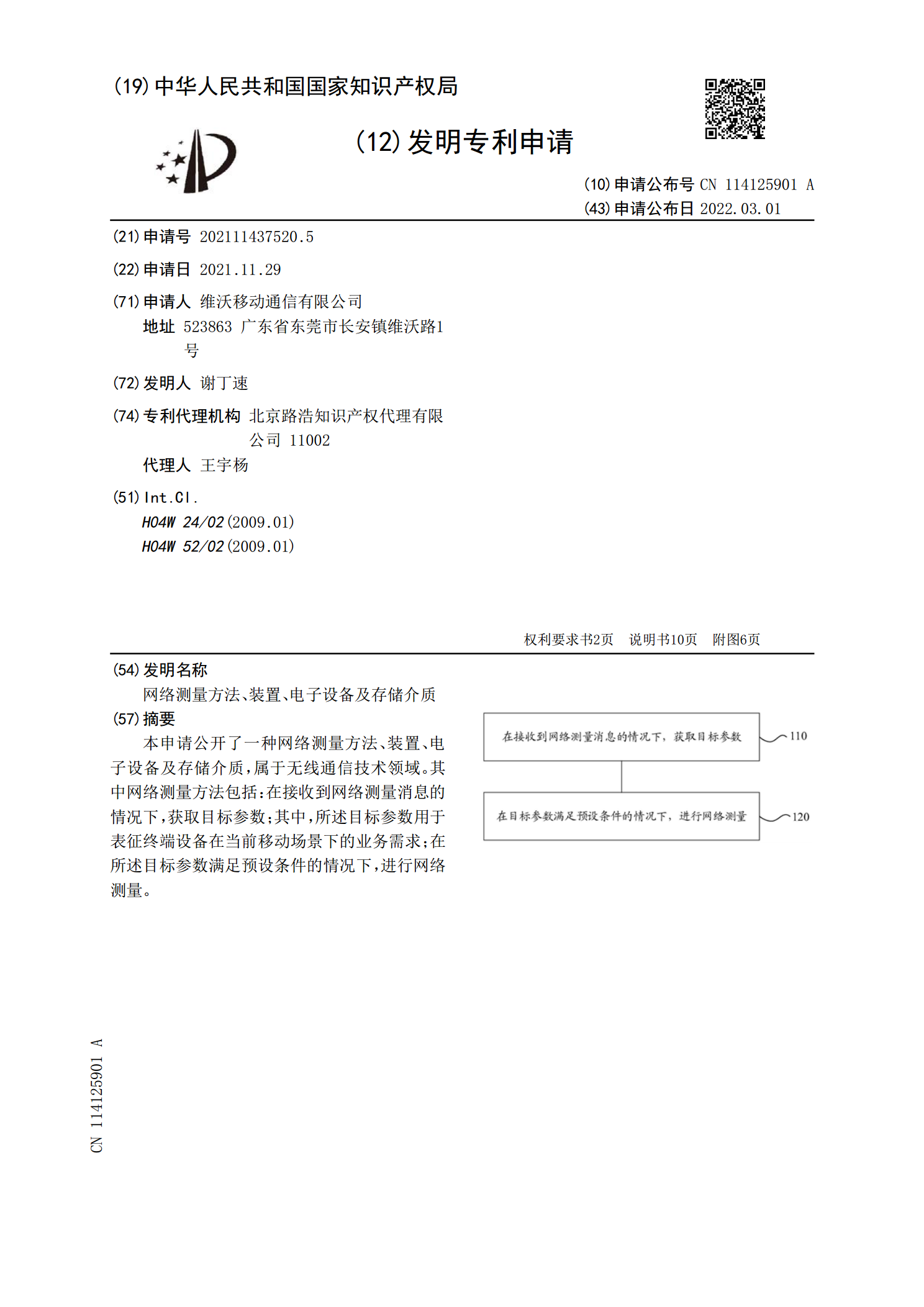
本申请公开了一种网络测量方法、装置、电子设备及存储介质,属于无线通信技术领域。其中网络测量方法包括:在接收到网络测量消息的情况下,获取目标参数;其中,所述目标参数用于表征终端设备在当前移动场景下的业务需求;在所述目标参数满足预设条件的情况下,进行网络测量。
血压测量方法、装置、电子设备及存储介质.pdf
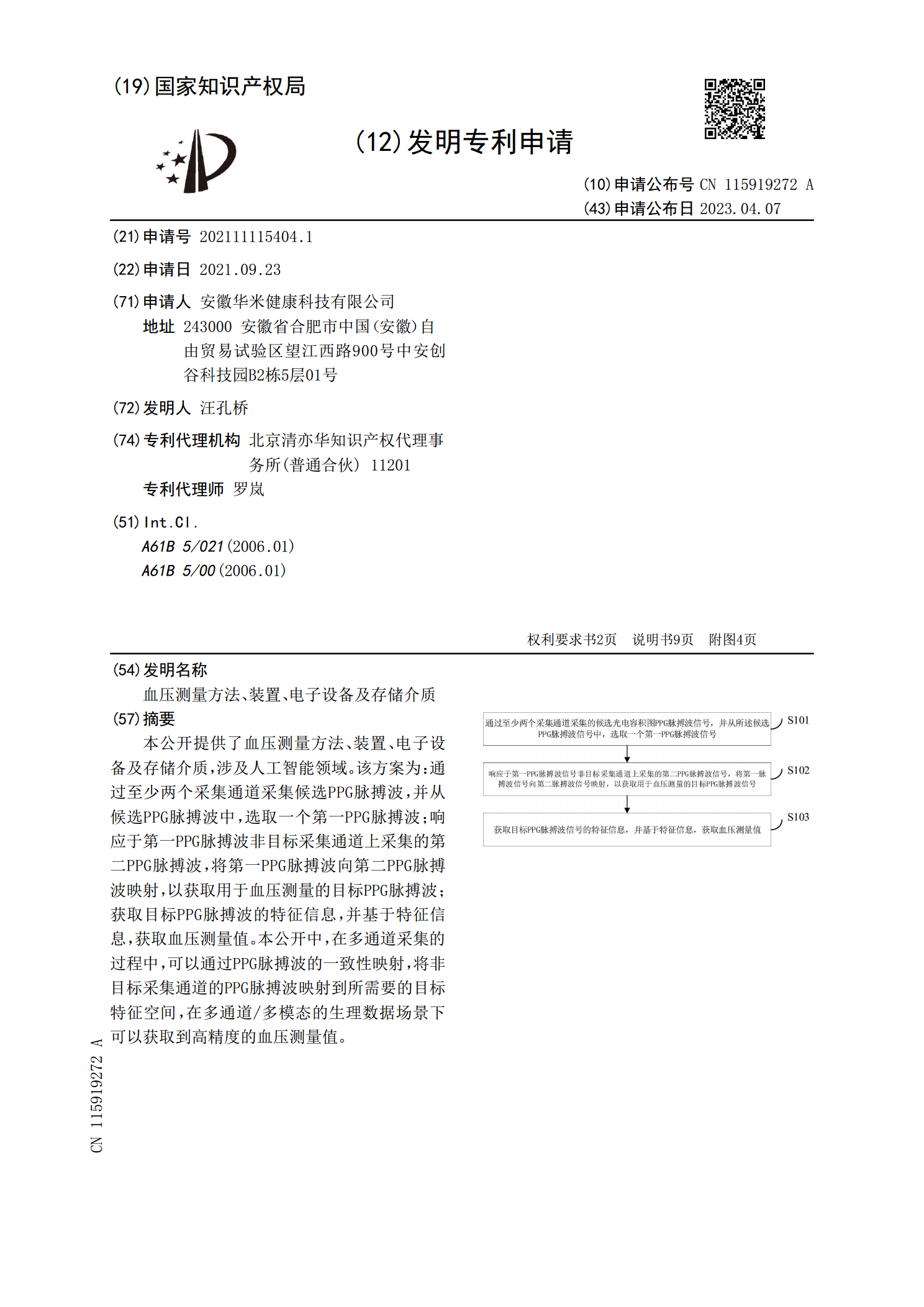
本公开提供了血压测量方法、装置、电子设备及存储介质,涉及人工智能领域。该方案为:通过至少两个采集通道采集候选PPG脉搏波,并从候选PPG脉搏波中,选取一个第一PPG脉搏波;响应于第一PPG脉搏波非目标采集通道上采集的第二PPG脉搏波,将第一PPG脉搏波向第二PPG脉搏波映射,以获取用于血压测量的目标PPG脉搏波;获取目标PPG脉搏波的特征信息,并基于特征信息,获取血压测量值。本公开中,在多通道采集的过程中,可以通过PPG脉搏波的一致性映射,将非目标采集通道的PPG脉搏波映射到所需要的目标特征空间,在多通道