
一种永磁同步电机自适应超螺旋滑模控制方法.pdf

山梅****ai


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种永磁同步电机自适应超螺旋滑模控制方法.pdf
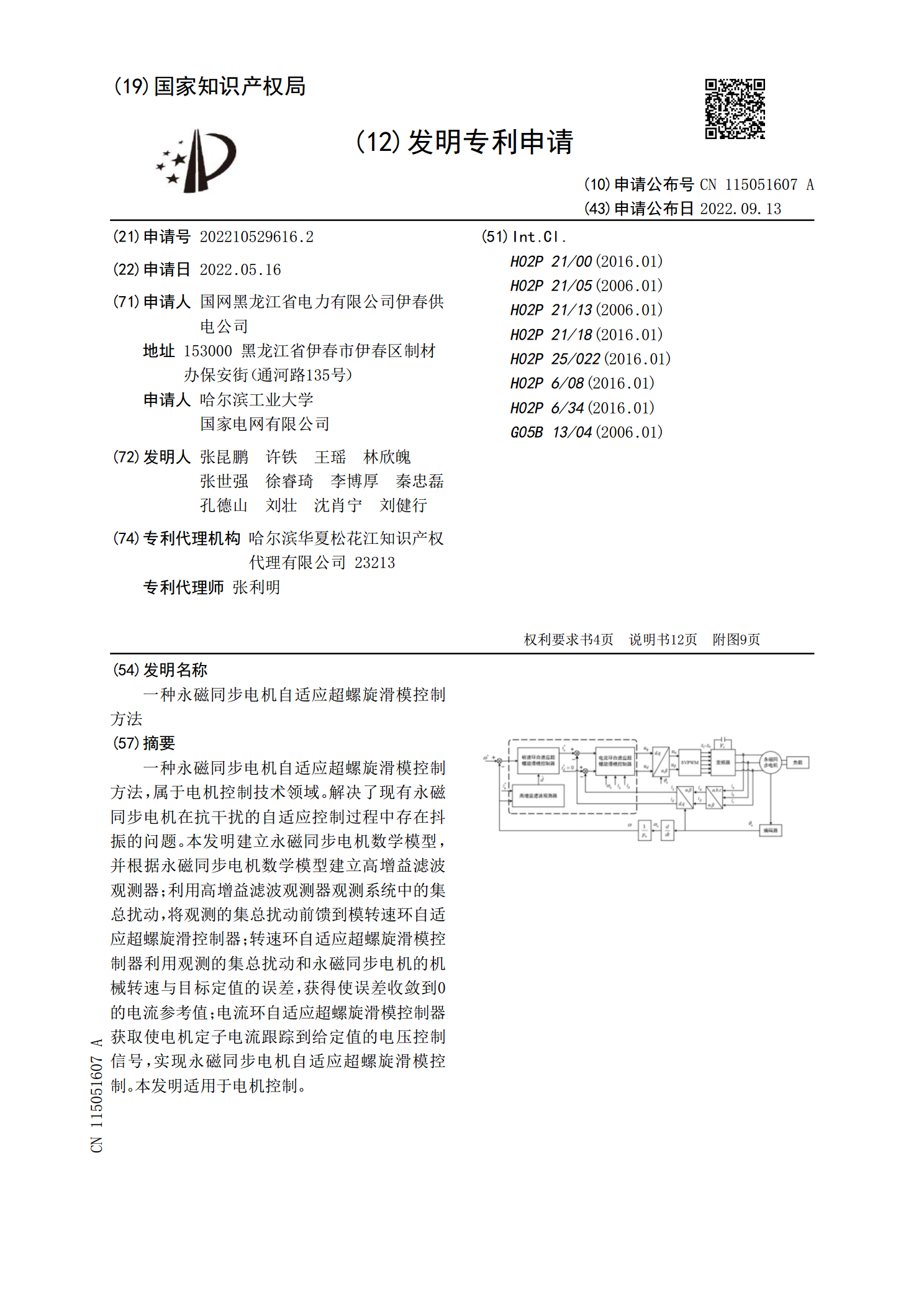
一种永磁同步电机自适应超螺旋滑模控制方法,属于电机控制技术领域。解决了现有永磁同步电机在抗干扰的自适应控制过程中存在抖振的问题。本发明建立永磁同步电机数学模型,并根据永磁同步电机数学模型建立高增益滤波观测器;利用高增益滤波观测器观测系统中的集总扰动,将观测的集总扰动前馈到模转速环自适应超螺旋滑控制器;转速环自适应超螺旋滑模控制器利用观测的集总扰动和永磁同步电机的机械转速与目标定值的误差,获得使误差收敛到0的电流参考值;电流环自适应超螺旋滑模控制器获取使电机定子电流跟踪到给定值的电压控制信号,实现永磁同步电

基于超螺旋滑模变结构永磁同步电机的控制.docx
基于超螺旋滑模变结构永磁同步电机的控制基于超螺旋滑模变结构永磁同步电机的控制摘要:超螺旋滑模变结构是一种应用于永磁同步电机控制中的先进控制方法。本文研究了基于超螺旋滑模变结构的永磁同步电机控制策略,并通过理论分析和仿真验证了其性能优势。研究结果表明,采用超螺旋滑模变结构的控制方法可以有效提高永磁同步电机的动态响应和稳态性能。1.引言永磁同步电机是一种具有高性能和高效率的电机,被广泛应用于电力驱动领域。随着控制技术的不断发展,改进永磁同步电机的控制策略对于提高电机性能具有重要意义。超螺旋滑模变结构作为一种新

永磁同步电机自适应滑模抗扰控制方法研究.docx
永磁同步电机自适应滑模抗扰控制方法研究永磁同步电机(PermanentMagnetSynchronousMotor,PMSM)作为一种新型的电机,具有高功率密度、高效率和优良的动态特性等优点,被广泛应用于各个领域。然而,由于其非线性和复杂的模型,以及外界的扰动等影响因素,提高永磁同步电机的控制精度和鲁棒性一直是一个研究热点。本文将探讨一种基于自适应滑模控制方法的永磁同步电机抗扰控制策略。这种方法将滑模控制与自适应控制相结合,既能实现对系统非线性和不确定性的滑模控制,又能实现对外界扰动的抗干扰能力。首先,介

基于新型超螺旋滑模自适应观测器的永磁同步电机转速估计策略.docx
基于新型超螺旋滑模自适应观测器的永磁同步电机转速估计策略基于新型超螺旋滑模自适应观测器的永磁同步电机转速估计策略摘要:本论文提出了一种基于新型超螺旋滑模自适应观测器的永磁同步电机转速估计策略。该策略采用超螺旋滑模控制理论和自适应观测器相结合,实现了对永磁同步电机转速的准确估计。通过数学建模和仿真实验验证,证明了本策略在提高估计精度和抗干扰能力方面的有效性。关键词:永磁同步电机,转速估计,超螺旋滑模控制理论,自适应观测器1.引言永磁同步电机是一种广泛应用于工业和家庭的电机,其转速估计是控制系统中必不可少的一

基于滑模自适应的永磁同步电机伺服控制研究的中期报告.docx
基于滑模自适应的永磁同步电机伺服控制研究的中期报告本中期报告旨在介绍基于滑模自适应的永磁同步电机伺服控制研究的进展和成果,包括研究背景、目标和方法,研究过程、实验和结果分析等。一、研究背景和目标永磁同步电机具有高效率、高功率密度和响应快等特点,在工业生产和机器人控制等领域中应用广泛。因此,对于永磁同步电机控制的研究具有重要意义。本研究旨在探索基于滑模自适应控制算法的永磁同步电机伺服控制方法,提高永磁同步电机的运行稳定性和控制效果。二、研究方法本研究采用基于滑模自适应控制算法的永磁同步电机伺服控制方法,该方