
数据处理方法、设备及存储介质.pdf

Ro****44

1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
数据处理方法、设备及存储介质.pdf
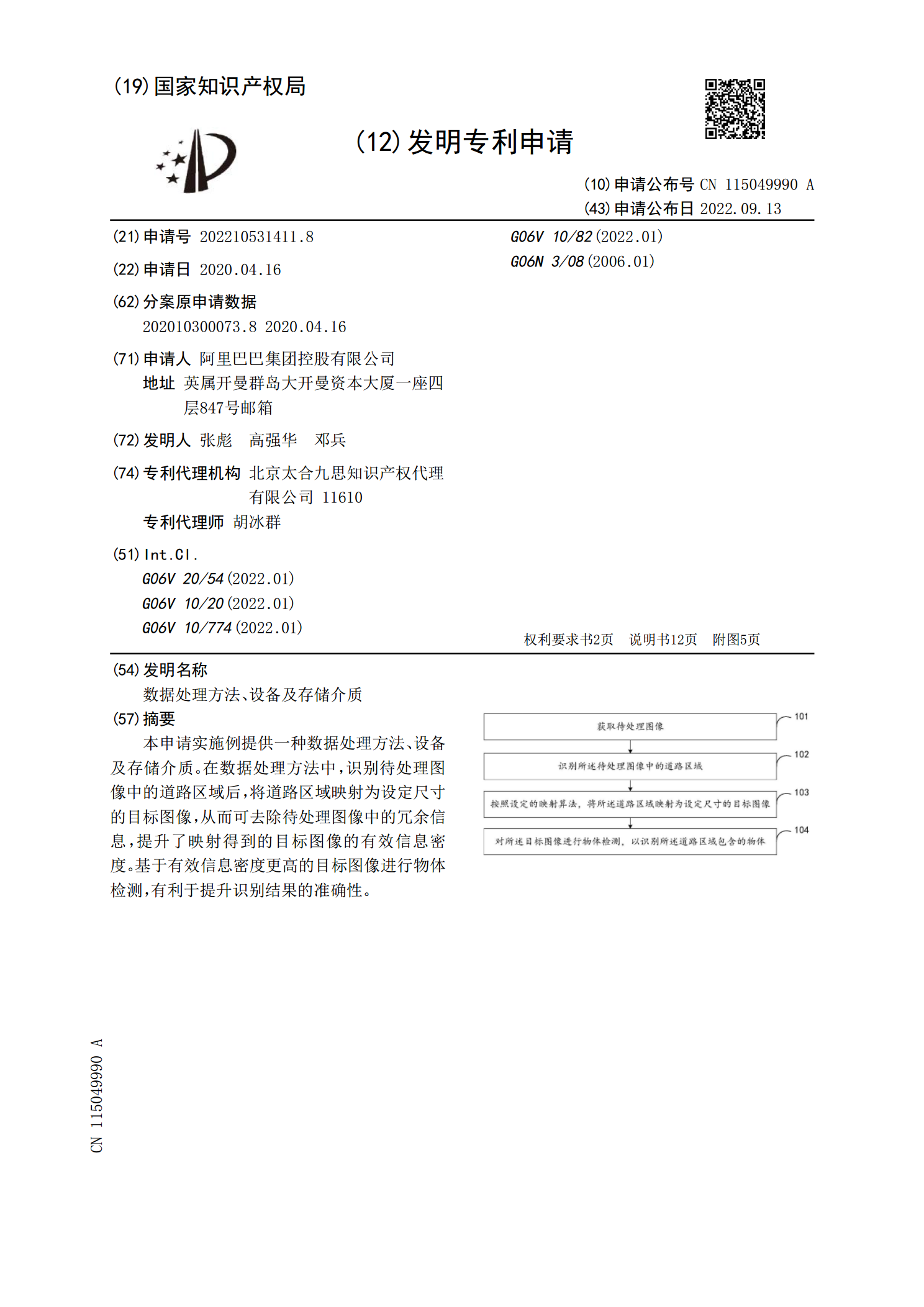
本申请实施例提供一种数据处理方法、设备及存储介质。在数据处理方法中,识别待处理图像中的道路区域后,将道路区域映射为设定尺寸的目标图像,从而可去除待处理图像中的冗余信息,提升了映射得到的目标图像的有效信息密度。基于有效信息密度更高的目标图像进行物体检测,有利于提升识别结果的准确性。
数据处理方法、设备和存储介质.pdf
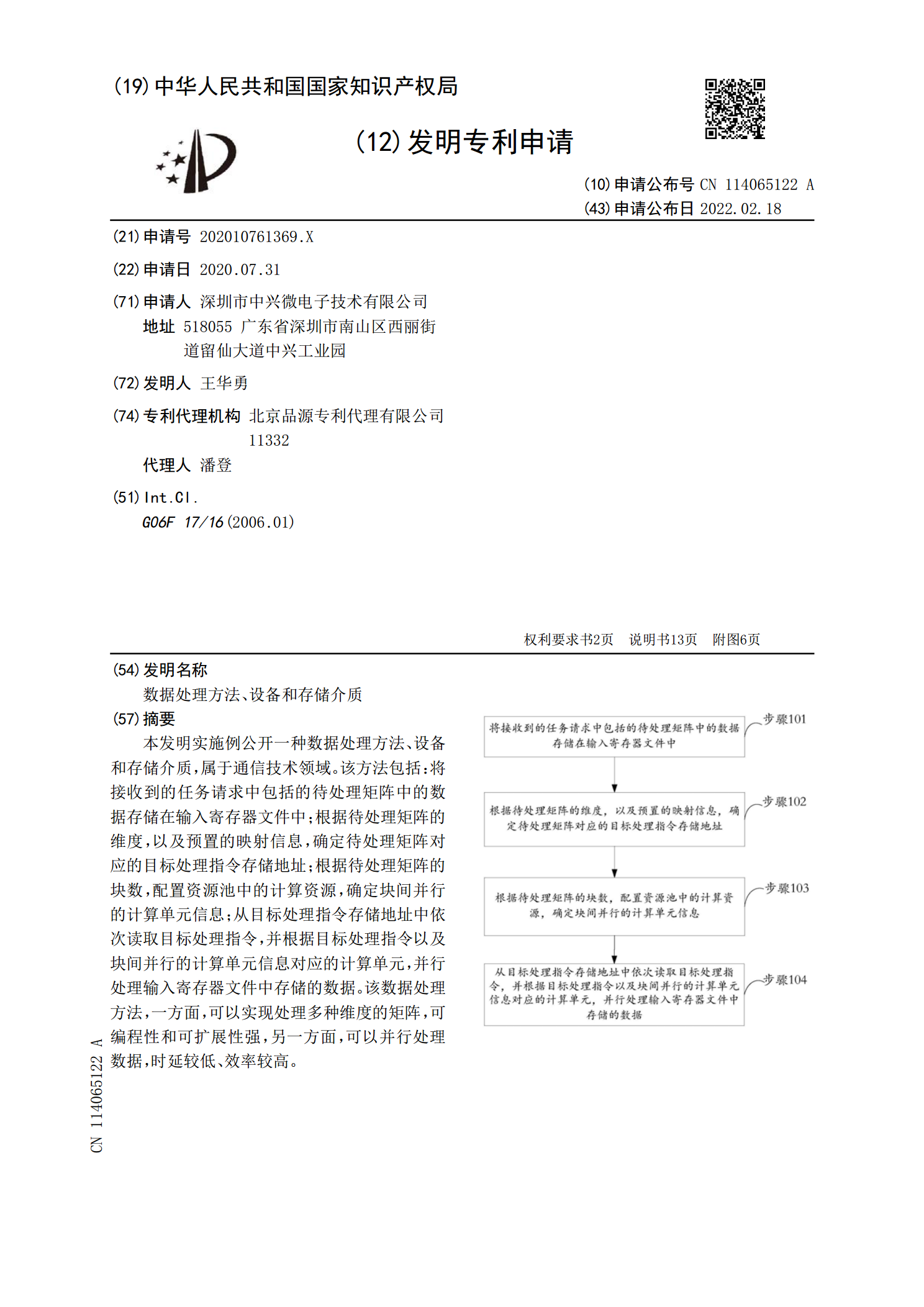
本发明实施例公开一种数据处理方法、设备和存储介质,属于通信技术领域。该方法包括:将接收到的任务请求中包括的待处理矩阵中的数据存储在输入寄存器文件中;根据待处理矩阵的维度,以及预置的映射信息,确定待处理矩阵对应的目标处理指令存储地址;根据待处理矩阵的块数,配置资源池中的计算资源,确定块间并行的计算单元信息;从目标处理指令存储地址中依次读取目标处理指令,并根据目标处理指令以及块间并行的计算单元信息对应的计算单元,并行处理输入寄存器文件中存储的数据。该数据处理方法,一方面,可以实现处理多种维度的矩阵,可编程性和
数据处理方法、设备与存储介质.pdf
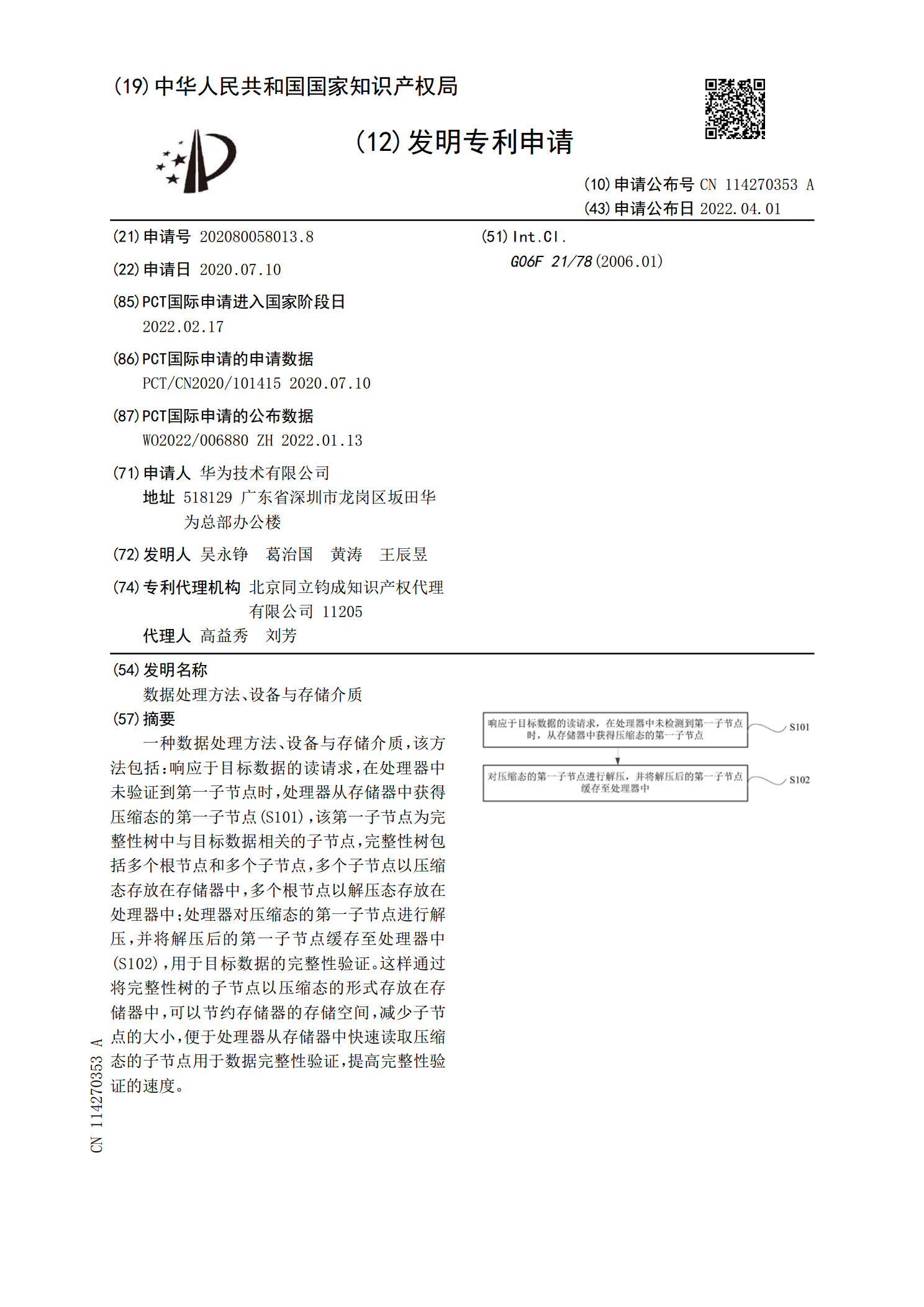
一种数据处理方法、设备与存储介质,该方法包括:响应于目标数据的读请求,在处理器中未验证到第一子节点时,处理器从存储器中获得压缩态的第一子节点(S101),该第一子节点为完整性树中与目标数据相关的子节点,完整性树包括多个根节点和多个子节点,多个子节点以压缩态存放在存储器中,多个根节点以解压态存放在处理器中;处理器对压缩态的第一子节点进行解压,并将解压后的第一子节点缓存至处理器中(S102),用于目标数据的完整性验证。这样通过将完整性树的子节点以压缩态的形式存放在存储器中,可以节约存储器的存储空间,减少子节点

数据处理方法、设备和存储介质.pdf
本申请实施例提供了一种数据处理方法、设备和存储介质,从原始图像中得到待处理图像数据,基于第一预设编码规则对基本层图像数据进行编码,基于第二预设编码规则对增强层图像数据进行编码,从而对待处理图像数据的精度尽可能地进行保留,保证待处理图像数据的动态范围和后期编辑空间,再通过根据基本层图像码流以及增强层图像码流,生成最终的目标图像码流,达到兼容的目的。

数据处理方法、设备及存储介质.pdf
本发明实施例提供一种数据处理方法、设备及存储介质,该方法包括:接收后端服务器通过第一门店中的下属网关发送的电子标签所属第一门店的标识信息;将第一门店的标识信息永久写入到预设存储区域;根据第一门店的标识信息拒绝与第二门店中的下属网关建立网络连接。电子标签将第一门店的标识信息永久写入到该电子标签中,来证明该电子标签归属于第一门店,则在电子标签与网关建立网络连接时,只能与第一门店中的下属网关建立网络连接,并连接到第一门店的网络中,第二门店中的下属网关不能将该电子标签连接入网,有效防止电子标签串店的事件发生,并且