
一种基于光栅投影测量系统的改进标定方法.pdf

小寄****淑k


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于光栅投影测量系统的改进标定方法.pdf
一种基于光栅投影测量系统的改进标定方法,本发明在传统的光栅投影测量系统中改进了对于模型参数求解的方法,具体采用四步相移法进行相位差值求解,通过所提出的数学方法求解模型参数最后带入相移高度模型实现物体的三维重建,本次实验分为两个部分:面具形貌重建和金属块测量实验。本发明提出了一种无需外物帮助的前提下在投影仪标定过程中和摄像机单目标定过程中提取出投影面和摄像机光心在世界坐标系下的表达式,直接计算投影仪和摄像机两光心之间的距离和投影仪光心(CCD摄像机光心)到参考平面的垂直距离的方法,既简化了系统校准过程中的繁

基于光栅条纹投影的三维测量系统标定方法的研究.docx
基于光栅条纹投影的三维测量系统标定方法的研究概述在现代制造业中,精度是至关重要的事项。这需要使用精确度高的测量设备来验证工件尺寸及形状。因此,开发出一种高精度、高效率的三维测量方法是一个迫切的需求。本文介绍一种利用光栅条纹投影的三维测量系统,在保证高精度的基础上提高了测量速度,同时还提出了一种标定方法来提高系统精度。光栅条纹投影光栅条纹投影是一种通过光的干涉原理来实现三维测量的技术。该技术的基本原理是将光源通过光栅,使得光线成为一系列等距的光栅条形,并通过将这些光栅条直接投影在待测物体表面上来获取三维空间

光栅投影三维测量系统的标定方法.docx
光栅投影三维测量系统的标定方法光栅投影三维测量系统的标定方法摘要光栅投影三维测量系统是一种常用于工业界的三维测量方法。本文将介绍光栅投影三维测量系统的标定方法。首先,介绍了光栅投影三维测量系统的基本原理。然后,详细描述了系统的硬件标定和软件标定方法。硬件标定包括相机标定和光栅投影仪标定,主要通过拍摄标定板和利用棋盘格等方法进行。软件标定主要涉及坐标系的建立和相机畸变校正。最后,给出了实验结果和讨论,验证了所提出的标定方法的有效性。本文的研究对于提高光栅投影三维测量系统的测量精度和可靠性具有重要意义。关键词

基于光栅条纹投影的三维测量系统标定方法的研究的中期报告.docx
基于光栅条纹投影的三维测量系统标定方法的研究的中期报告中期报告一、研究背景光栅投影三维测量技术广泛应用于工业、遥感、医学等领域,在实际应用中取得了良好的效果。该技术主要通过对被测物体的光栅影像进行处理,获取物体表面的三维信息。成像时投射的光栅条纹可以提供物体表面的高度和形态信息,通过对光栅影像进行处理可以得到物体表面的三维坐标值。本研究的目的在于对基于光栅条纹投影的三维测量系统进行标定,提高系统的测量精度和稳定性。二、研究内容1.系统原理分析本研究所涉及的光栅投影三维测量系统主要由光源、光栅投影器、相机等
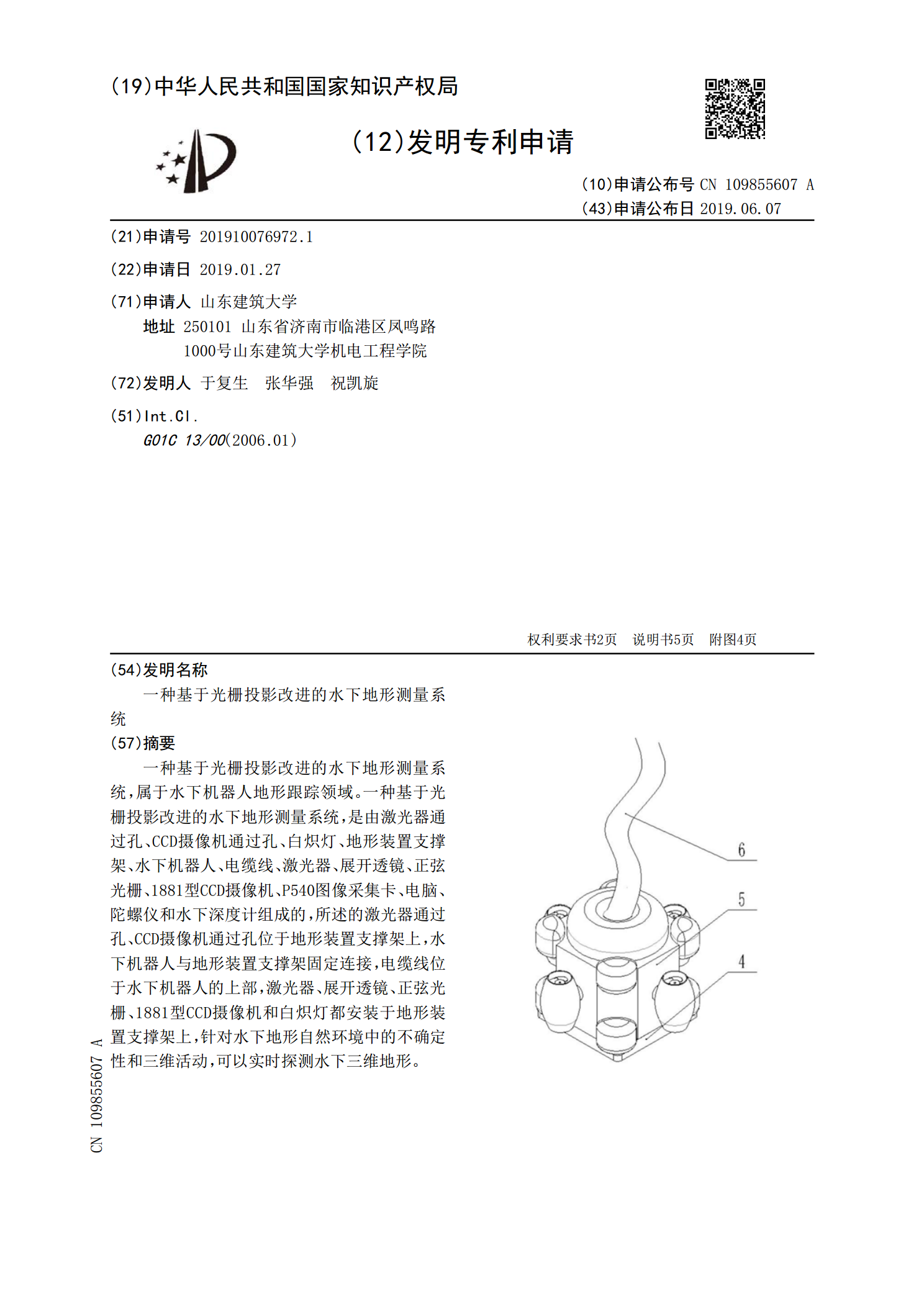
一种基于光栅投影改进的水下地形测量系统.pdf
一种基于光栅投影改进的水下地形测量系统,属于水下机器人地形跟踪领域。一种基于光栅投影改进的水下地形测量系统,是由激光器通过孔、CCD摄像机通过孔、白炽灯、地形装置支撑架、水下机器人、电缆线、激光器、展开透镜、正弦光栅、1881型CCD摄像机、P540图像采集卡、电脑、陀螺仪和水下深度计组成的,所述的激光器通过孔、CCD摄像机通过孔位于地形装置支撑架上,水下机器人与地形装置支撑架固定连接,电缆线位于水下机器人的上部,激光器、展开透镜、正弦光栅、1881型CCD摄像机和白炽灯都安装于地形装置支撑架上,针对水下