
一种基于特征点识别的系统及抓取方法.pdf

邻家****ng

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于特征点识别的系统及抓取方法.pdf
本发明公开了一种基于特征点识别的系统及抓取方法,抓取系统包括:采集端;识别端,用于存储多个角度模板,同时接受采集的图像,将采集的图像与多个角度模板逐一进行识别匹配,判断采集的图像是否为目标对象,若是,选择与采集的图像相匹配的角度模板作为识别模板,从图像中获取目标对象的实际特征点以及从识别模板中获取识别特征点,通过比对目标对象的实际特征点和识别模板的识别特征点;多个机械臂;本发明旨在提供一种基于特征点识别的系统及抓取方法,使识别模板的识别特征点靠近于实际特征点,通过识别模板的识别特征生成的机械臂的移动轨迹和
一种基于特征点识别的牙齿正畸结果预测方法及系统.pdf
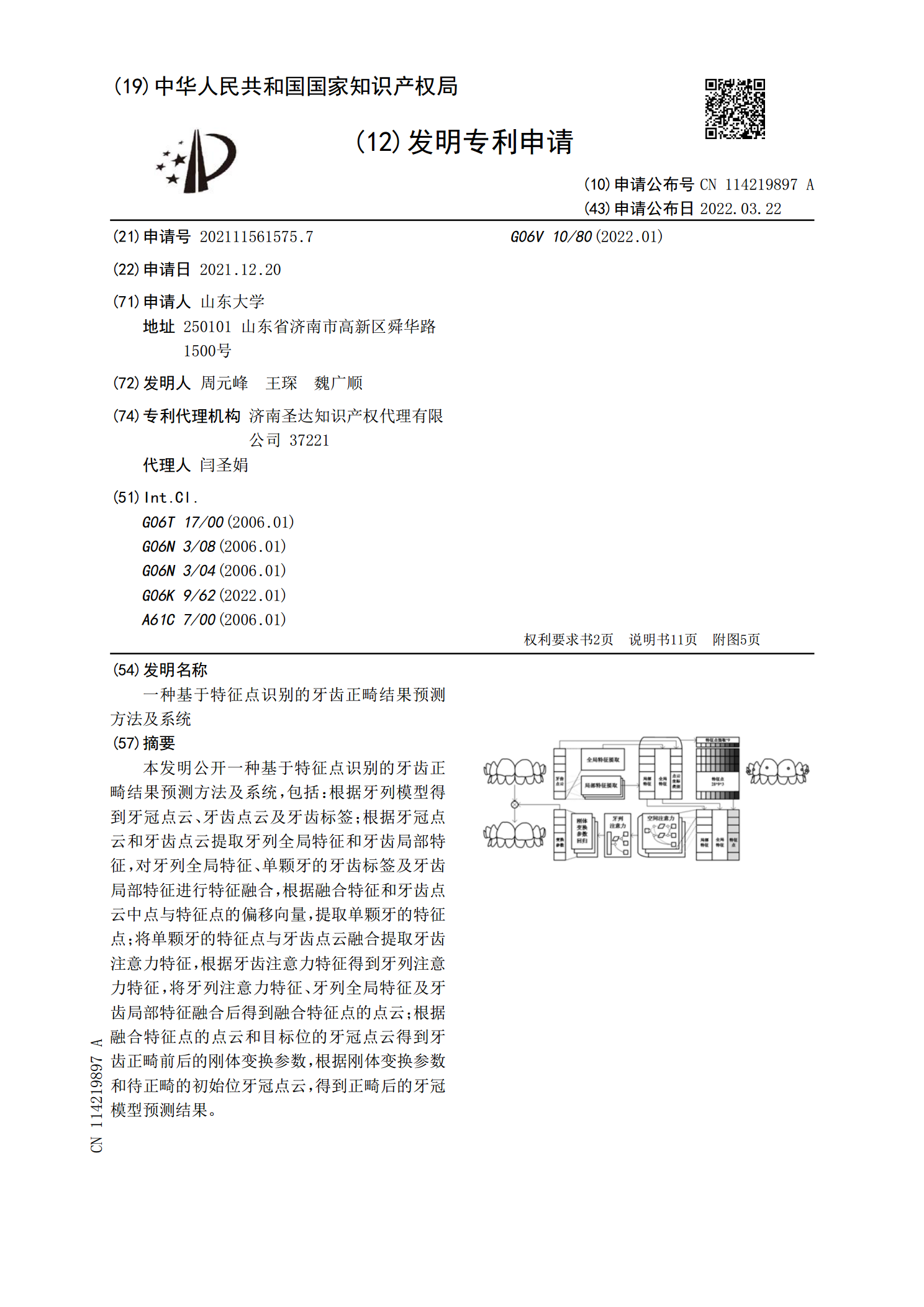
本发明公开一种基于特征点识别的牙齿正畸结果预测方法及系统,包括:根据牙列模型得到牙冠点云、牙齿点云及牙齿标签;根据牙冠点云和牙齿点云提取牙列全局特征和牙齿局部特征,对牙列全局特征、单颗牙的牙齿标签及牙齿局部特征进行特征融合,根据融合特征和牙齿点云中点与特征点的偏移向量,提取单颗牙的特征点;将单颗牙的特征点与牙齿点云融合提取牙齿注意力特征,根据牙齿注意力特征得到牙列注意力特征,将牙列注意力特征、牙列全局特征及牙齿局部特征融合后得到融合特征点的点云;根据融合特征点的点云和目标位的牙冠点云得到牙齿正畸前后的刚体
一种基于特征点的平面跟踪方法、系统.pdf
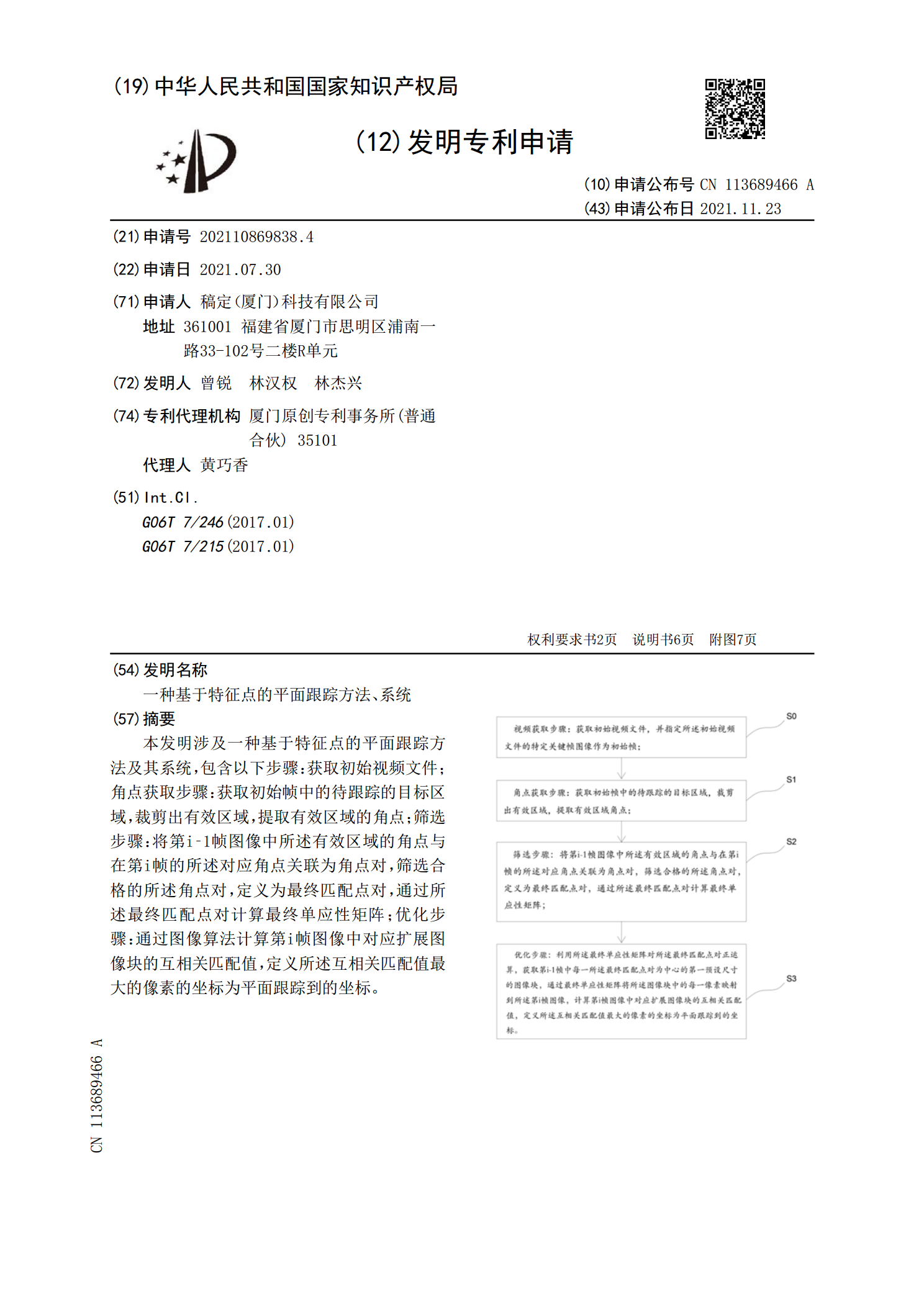
本发明涉及一种基于特征点的平面跟踪方法及其系统,包含以下步骤:获取初始视频文件;角点获取步骤:获取初始帧中的待跟踪的目标区域,裁剪出有效区域,提取有效区域的角点;筛选步骤:将第i‑1帧图像中所述有效区域的角点与在第i帧的所述对应角点关联为角点对,筛选合格的所述角点对,定义为最终匹配点对,通过所述最终匹配点对计算最终单应性矩阵;优化步骤:通过图像算法计算第i帧图像中对应扩展图像块的互相关匹配值,定义所述互相关匹配值最大的像素的坐标为平面跟踪到的坐标。
一种基于生物特征识别的智慧票务售票验票方法及系统.pdf
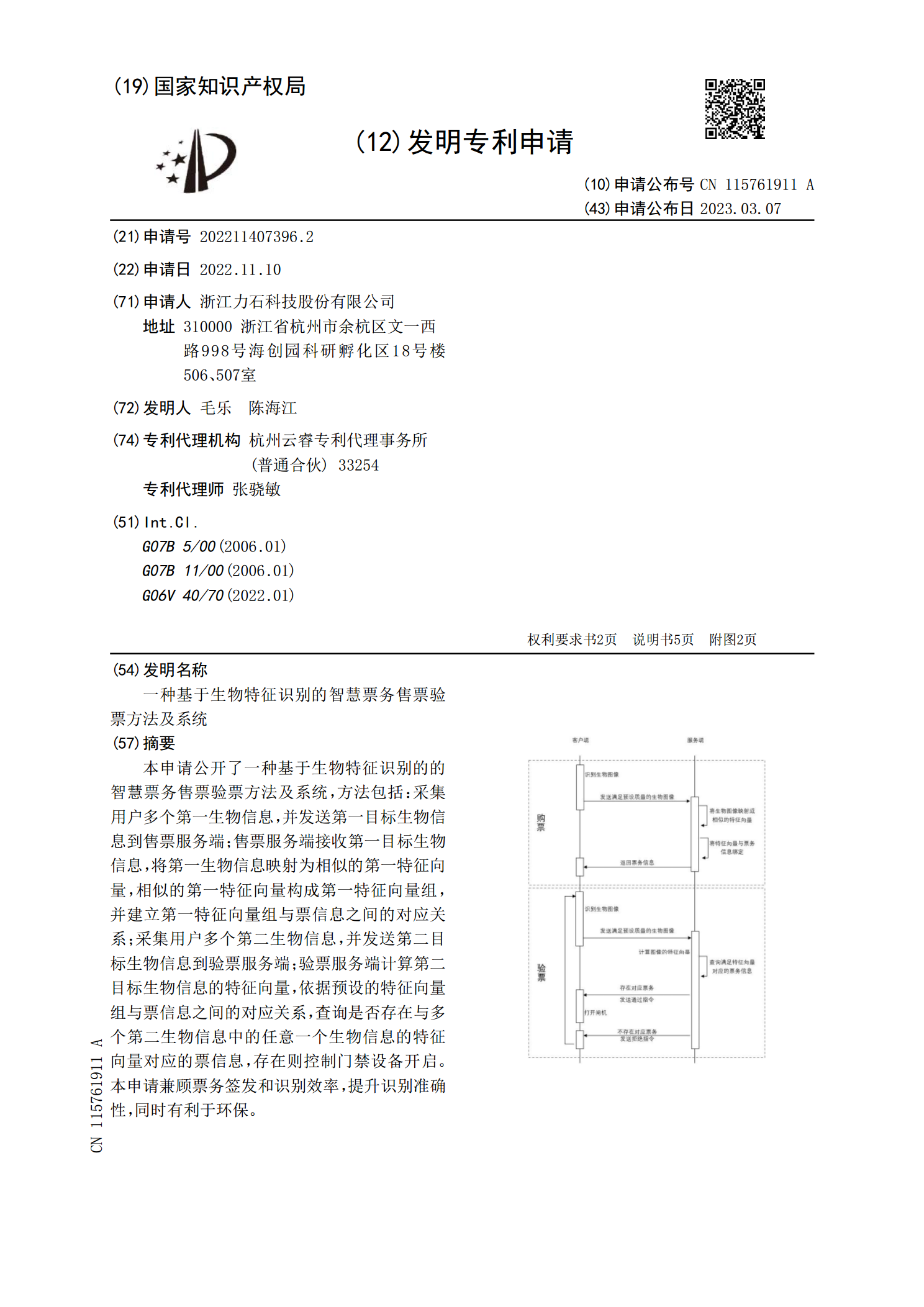
本申请公开了一种基于生物特征识别的的智慧票务售票验票方法及系统,方法包括:采集用户多个第一生物信息,并发送第一目标生物信息到售票服务端;售票服务端接收第一目标生物信息,将第一生物信息映射为相似的第一特征向量,相似的第一特征向量构成第一特征向量组,并建立第一特征向量组与票信息之间的对应关系;采集用户多个第二生物信息,并发送第二目标生物信息到验票服务端;验票服务端计算第二目标生物信息的特征向量,依据预设的特征向量组与票信息之间的对应关系,查询是否存在与多个第二生物信息中的任意一个生物信息的特征向量对应的票信息

一种基于特征点的异物检测方法和系统.pdf
一种基于特征点的异物检测方法和系统,包括以下步骤:对电力隧道内的多个巡检点环境进行拍摄,获取模板图片,并对模板图片进行sift特征点提取,其中模板图片不包含除电力装置以外的异常;获取巡检时的检查图片,对检查图片进行sift特征点提取;根据第一特征点与第二特征点对检查图片与模板图片进行对齐操作;重新对对齐后的模板图片和检测图片进行sift特征点提取,比较对齐后的检测图片以及检测图片,获取两者之间不能相互匹配的特征点;获取模板图片与匹配图片中对应聚类区域的相似度,若相似度低于相似度阈值,则将该聚类区域标记为异