
一种面向智能驾驶车辆的多传感器融合方法及系统.pdf

雨巷****轶丽

1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种面向智能驾驶车辆的多传感器融合方法及系统.pdf
本发明属于智能驾驶车辆技术领域,具体涉及一种面向智能驾驶车辆的多传感器融合方法及系统;该方法包括:根据GM‑PHD算法和探测物体的矩形目标模型构建扩展目标跟踪器;采用扩展目标跟踪器对毫米波雷达的探测信息进行处理,得到探测物体的毫米波雷达航迹信息;采用构建的边界框探测器和配置有IMM‑UKF的JPDA跟踪器对激光雷达的探测信息进行处理,得到探测物体的激光雷达航迹信息;采用时空间转换将毫米波雷达航迹信息和激光雷达航迹信息进行处理,得到中心融合节点;采用IMF算法对中心融合节点进行处理,得到全局航迹信息;本发明
智能驾驶车辆的多传感器下线标定系统及其方法.pdf
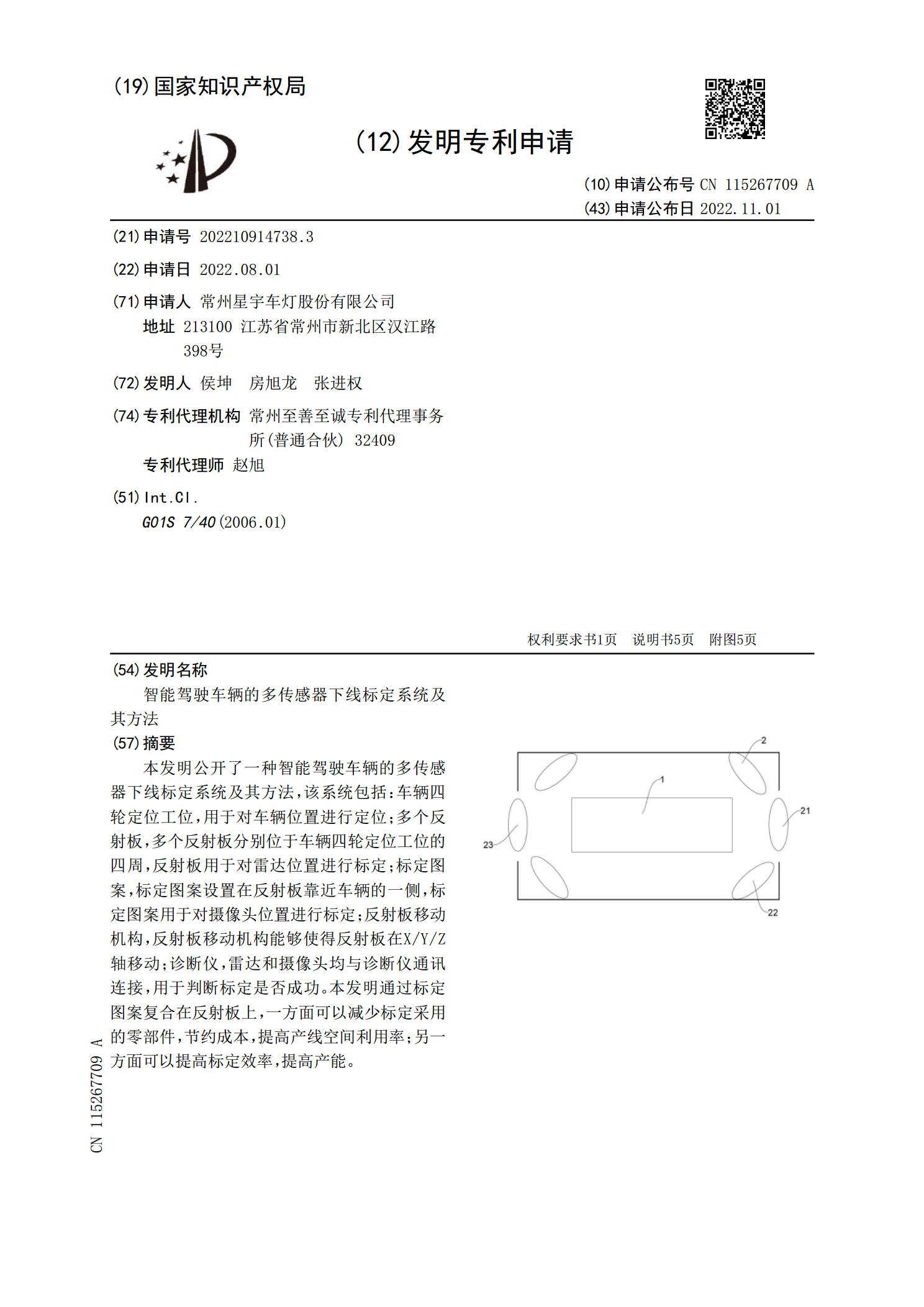
本发明公开了一种智能驾驶车辆的多传感器下线标定系统及其方法,该系统包括:车辆四轮定位工位,用于对车辆位置进行定位;多个反射板,多个反射板分别位于车辆四轮定位工位的四周,反射板用于对雷达位置进行标定;标定图案,标定图案设置在反射板靠近车辆的一侧,标定图案用于对摄像头位置进行标定;反射板移动机构,反射板移动机构能够使得反射板在X/Y/Z轴移动;诊断仪,雷达和摄像头均与诊断仪通讯连接,用于判断标定是否成功。本发明通过标定图案复合在反射板上,一方面可以减少标定采用的零部件,节约成本,提高产线空间利用率;另一方面可

多传感器信息融合技术在智能驾驶系统中的应用.docx
多传感器信息融合技术在智能驾驶系统中的应用摘要:介绍了当今国际上流行的几种智能驾驶系统并分析了采用单一传感器的驾驶系统中存在的问题给出了信息融合技术的原理和结构。讨论了多传感器信息融合技术在智能驾驶系统(ITS)中的应用算法及其有待进一步解决的问题。关键词:贝叶斯估计信息融合障碍探测智能驾驶随着传感器技术、信息处理技术、测量技术与计算机技术的发展智能驾驶系统(辅助驾驶系统一无人驾驶系统)也得了飞速的发展。消费者越来越注重驾驶的安全性与舒适性这就要求传感器能识
多传感器信息融合技术在智能驾驶系统中的应用.docx
多传感器信息融合技术在智能驾驶系统中的应用摘要:介绍了当今国际上流行的几种智能驾驶系统并分析了采用单一传感器的驾驶系统中存在的问题给出了信息融合技术的原理和结构。讨论了多传感器信息融合技术在智能驾驶系统(ITS)中的应用算法及其有待进一步解决的问题。关键词:贝叶斯估计信息融合障碍探测智能驾驶随着传感器技术、信息处理技术、测量技术与计算机技术的发展智能驾驶系统(辅助驾驶系统一无人驾驶系统)也得了飞速的发展。消费者越来越注重驾驶的安全性与舒适性这就要求传感器能识

一种面向自动驾驶的多传感器融合SLAM框架.docx
一种面向自动驾驶的多传感器融合SLAM框架一种面向自动驾驶的多传感器融合SLAM框架摘要:自动驾驶技术的发展对于安全、高效和智能的交通系统有着重要的作用。同时,多传感器融合的SimultaneousLocalizationandMapping(SLAM)技术在自动驾驶中起着关键的作用,能够实现车辆在未知环境中的自主定位和地图构建。本文提出了一种面向自动驾驶的多传感器融合SLAM框架,用于实时的环境建模和自主定位,以提高自动驾驶车辆的定位准确性和鲁棒性。关键词:自动驾驶;多传感器融合;SLAM;环境建模;自