
一种多源异构感知信息多层级融合表征与目标识别方法.pdf

佳宁****么啦

1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多源异构感知信息多层级融合表征与目标识别方法.pdf
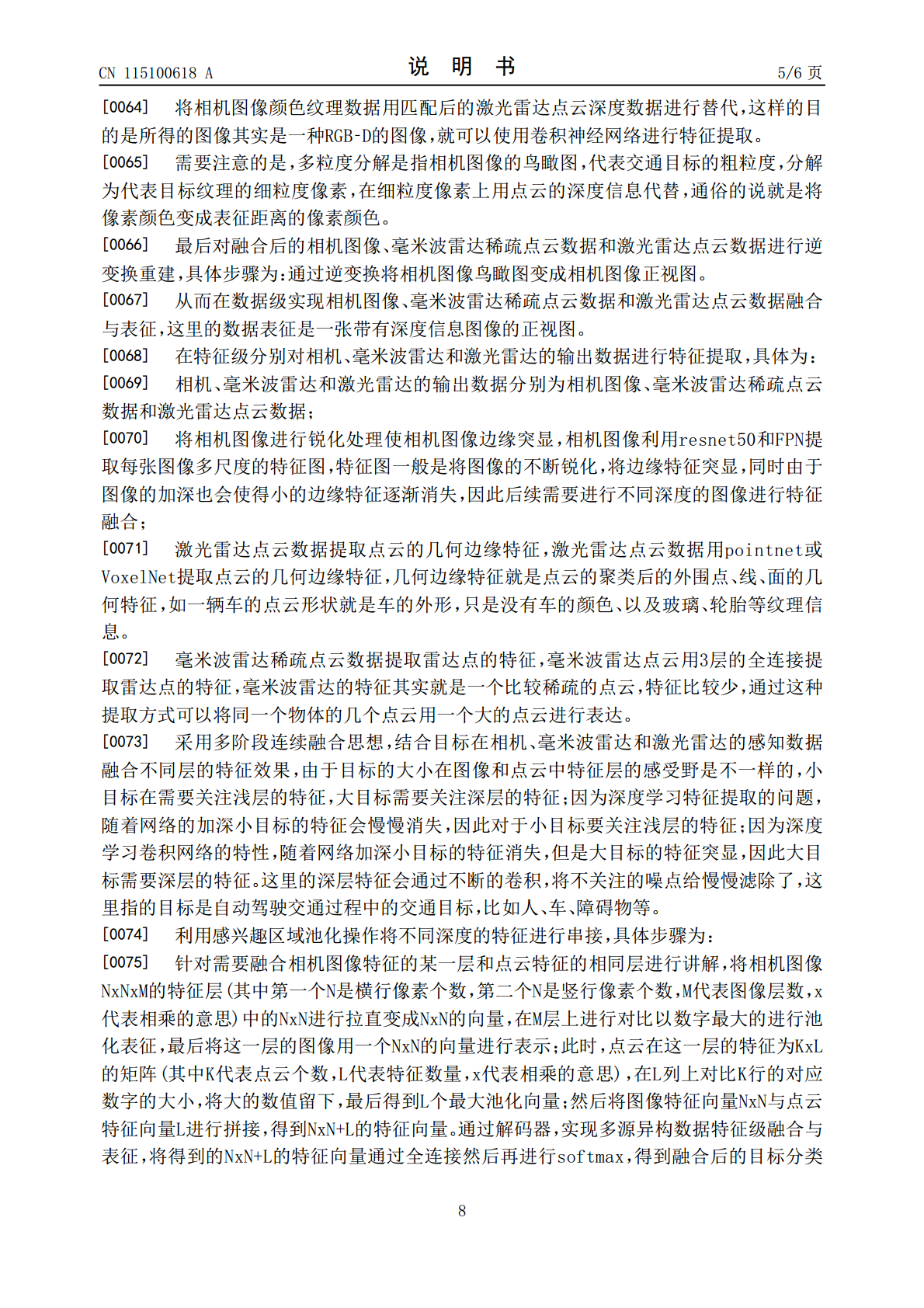
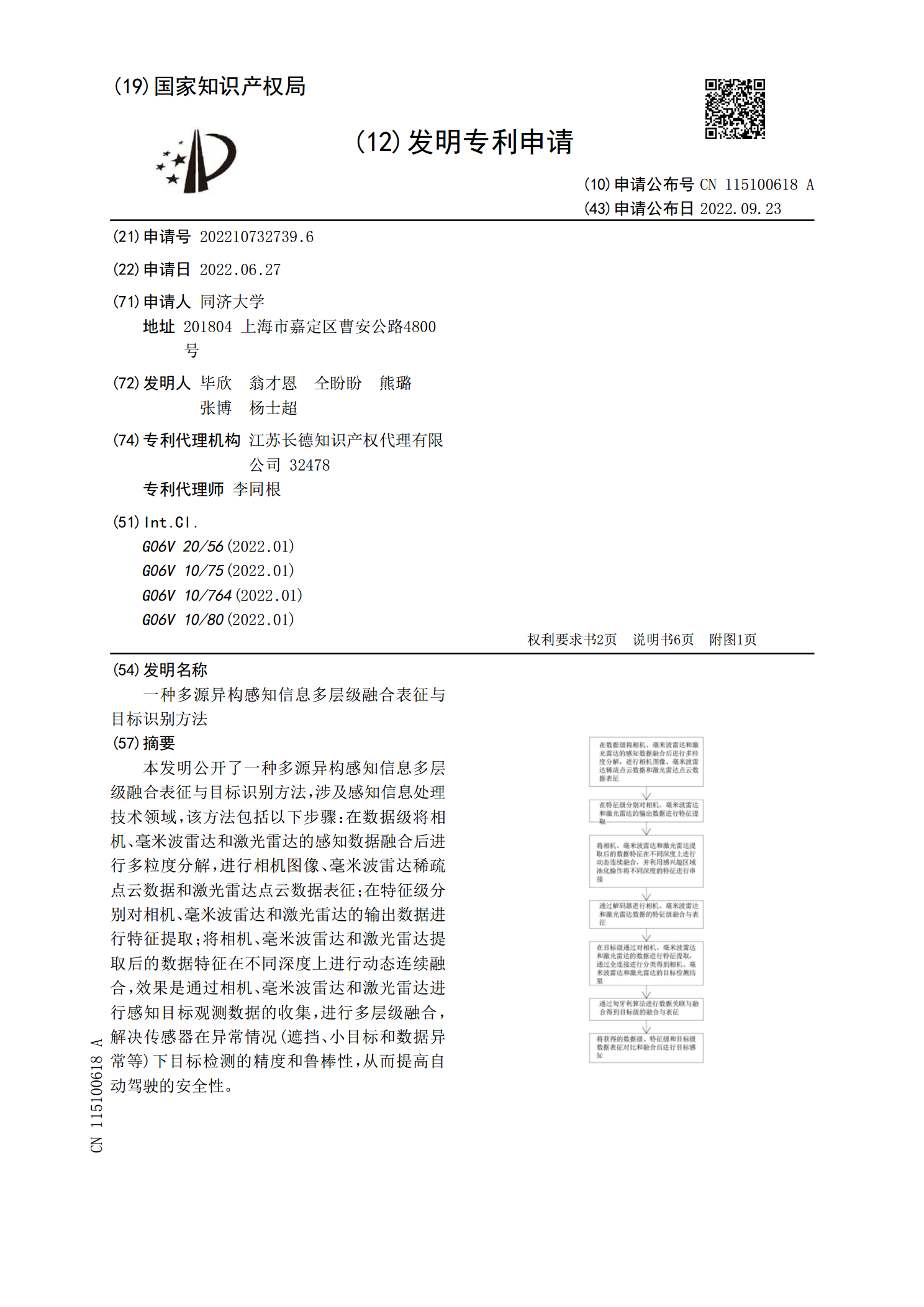
本发明公开了一种多源异构感知信息多层级融合表征与目标识别方法,涉及感知信息处理技术领域,该方法包括以下步骤:在数据级将相机、毫米波雷达和激光雷达的感知数据融合后进行多粒度分解,进行相机图像、毫米波雷达稀疏点云数据和激光雷达点云数据表征;在特征级分别对相机、毫米波雷达和激光雷达的输出数据进行特征提取;将相机、毫米波雷达和激光雷达提取后的数据特征在不同深度上进行动态连续融合,效果是通过相机、毫米波雷达和激光雷达进行感知目标观测数据的收集,进行多层级融合,解决传感器在异常情况(遮挡、小目标和数据异常等)下目标检
一种多感知源信息融合视频方法.pdf
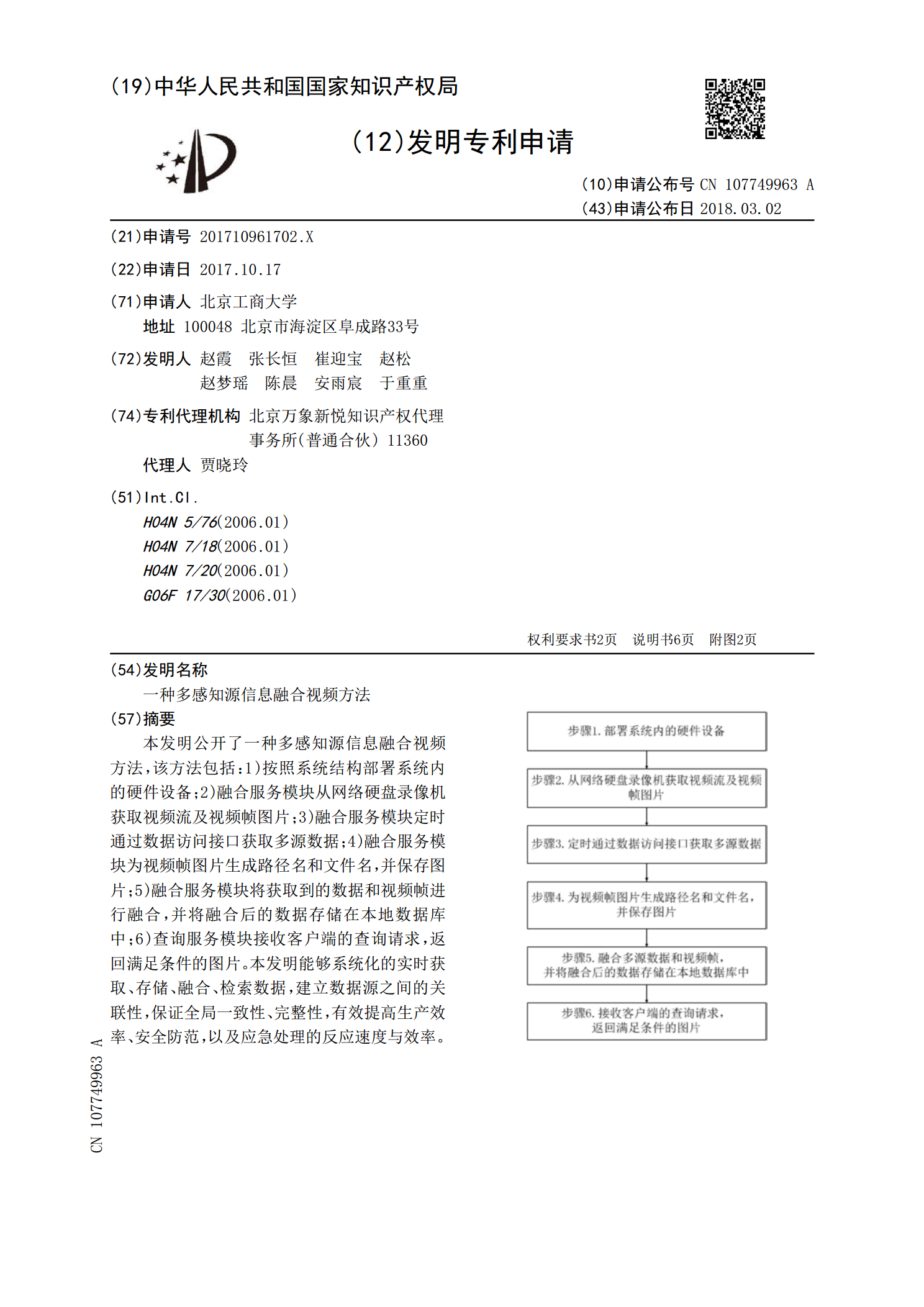
本发明公开了一种多感知源信息融合视频方法,该方法包括:1)按照系统结构部署系统内的硬件设备;2)融合服务模块从网络硬盘录像机获取视频流及视频帧图片;3)融合服务模块定时通过数据访问接口获取多源数据;4)融合服务模块为视频帧图片生成路径名和文件名,并保存图片;5)融合服务模块将获取到的数据和视频帧进行融合,并将融合后的数据存储在本地数据库中;6)查询服务模块接收客户端的查询请求,返回满足条件的图片。本发明能够系统化的实时获取、存储、融合、检索数据,建立数据源之间的关联性,保证全局一致性、完整性,有效提高生产

基于多源异构数据融合的城市感知计算的开题报告.docx
基于多源异构数据融合的城市感知计算的开题报告一、研究背景及意义城市感知计算(UrbanSensingComputing)是指通过感知技术将城市中大量的物理信息转换成数字信息,并用计算机进行简化与处理,最终为城市管理、服务提供以及社会决策等领域提供决策分析的一种技术方法。而数据融合技术作为城市感知计算的重要组成部分,可以将多源异构数据进行整合,形成更加全面、准确的数据表达。当前,我国城市化进程仍在快速发展当中,城市人口规模和数量都呈现出不同程度的增长趋势,对城市管理和社会服务的需求也愈加迫切。在这种背景下,

一种基于多源信息融合的植物识别方法.docx
一种基于多源信息融合的植物识别方法摘要植物识别技术在现代农业、园艺、生态环境保护等领域具有广泛应用价值。本文提出基于多源信息融合的植物识别方法,利用机器学习算法将不同来源的植物图像进行特征提取和分类,从而提高了植物识别的准确性和普适性。本文还介绍了该方法的实现过程和结果,在多个实验数据集上取得了较好的识别效果。关键词:植物识别、机器学习、特征提取、多源信息融合AbstractPlantrecognitiontechnologyhaswideapplicationvaluesinmodernagricult

融合多源图像信息的果实识别方法.docx
融合多源图像信息的果实识别方法标题:基于融合多源图像信息的果实识别方法摘要:果实识别在农业领域具有广泛的应用和重要意义。由于果实的形状、颜色、纹理等特征多变且相似度较高,传统的果实识别方法存在一定的挑战。本论文提出了一种基于融合多源图像信息的果实识别方法。该方法利用多种特征提取方法,并将它们融合起来以实现更准确、鲁棒度更高的果实识别。1.引言果实识别在农业生产和果实贸易中起到至关重要的作用。传统的果实识别方法通常仅仅依靠图像的颜色特征进行识别,但这种方法容易受到照明条件和果实成熟度的影响,导致识别准确率较