
基于改进的CPA算法的阵列天线方向图综合设计方法.pdf

是你****韵呀


1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于改进的CPA算法的阵列天线方向图综合设计方法.pdf
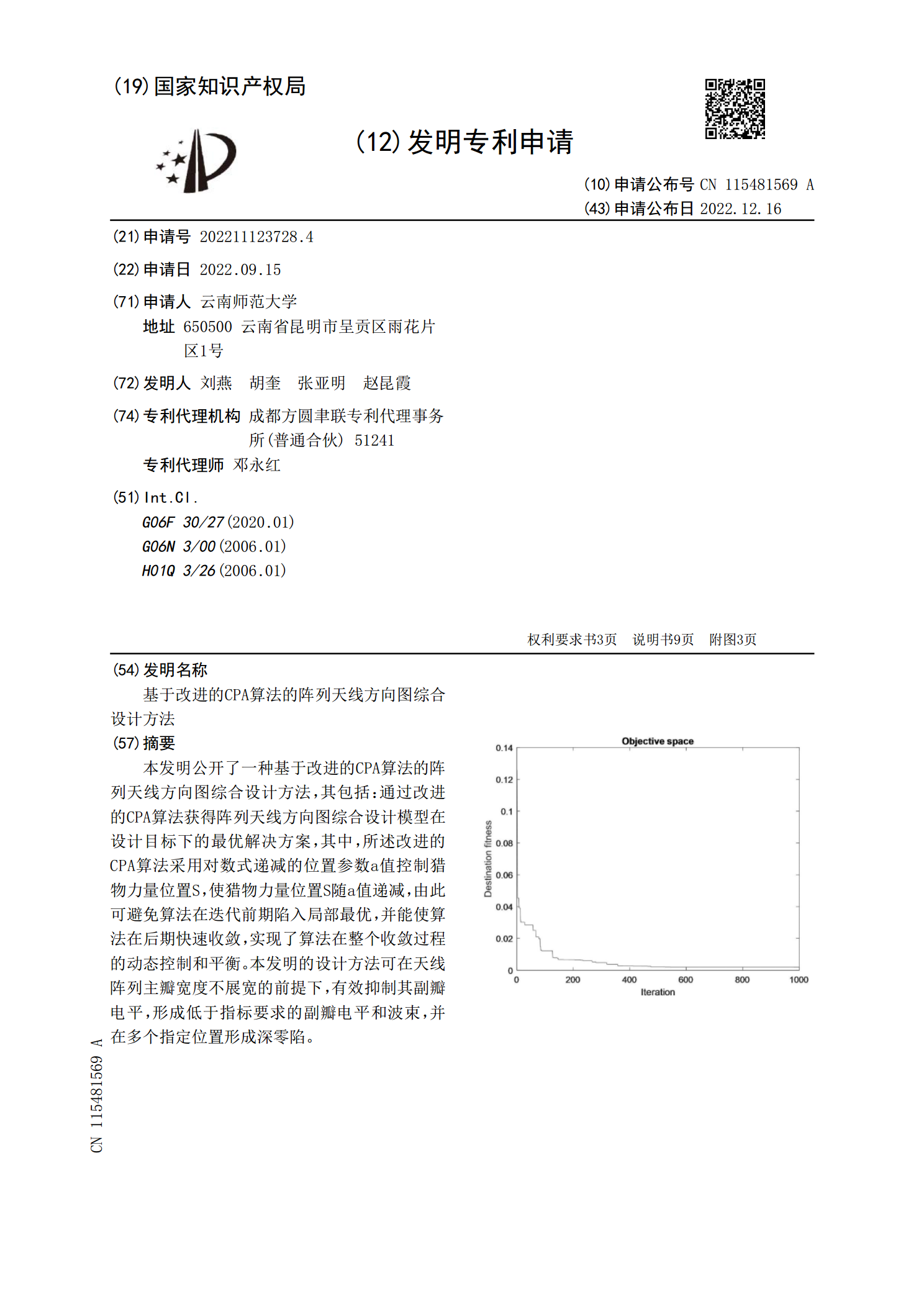
本发明公开了一种基于改进的CPA算法的阵列天线方向图综合设计方法,其包括:通过改进的CPA算法获得阵列天线方向图综合设计模型在设计目标下的最优解决方案,其中,所述改进的CPA算法采用对数式递减的位置参数a值控制猎物力量位置S,使猎物力量位置S随a值递减,由此可避免算法在迭代前期陷入局部最优,并能使算法在后期快速收敛,实现了算法在整个收敛过程的动态控制和平衡。本发明的设计方法可在天线阵列主瓣宽度不展宽的前提下,有效抑制其副瓣电平,形成低于指标要求的副瓣电平和波束,并在多个指定位置形成深零陷。
基于免疫算法的阵列天线方向图综合.pptx
汇报人:目录PARTONEPARTTWO阵列天线方向图综合的意义免疫算法的原理和特点PARTTHREE阵列天线方向图综合的数学模型免疫算法在阵列天线方向图综合中的应用算法流程:介绍免疫算法的基本流程,包括初始化、选择、交叉、变异等步骤阵列天线模型:建立阵列天线的数学模型,为后续的算法实现提供基础适应度函数设计:根据问题需求,设计合适的适应度函数,用于评估解的质量算法参数设置:介绍免疫算法中的重要参数,如种群大小、变异率等,并说明如何调整这些参数以获得更好的性能结果展示结果展示仿真结果:展示基于免疫算法的阵

基于免疫算法的阵列天线方向图综合的开题报告.docx
基于免疫算法的阵列天线方向图综合的开题报告一、研究背景及意义随着通信技术的发展,天线阵列已经成为无线通信系统中重要的部分。天线阵列通过控制其相位和振幅等参数,可以提高通信系统的信号质量和抗干扰能力。而天线阵列的方向图对其性能起着重要的作用,因此如何优化阵列天线的方向图已成为天线阵列技术的研究热点之一。现有的阵列天线方向图优化方法主要包括纯数学方法和优化算法方法。纯数学方法主要是基于数学模型对阵列天线的方向图进行求解,具有较高的计算精度和可信度。但是由于涉及到大量的数值计算,计算复杂度较高,难以实现在线调整

基于免疫算法的阵列天线方向图综合的中期报告.docx
基于免疫算法的阵列天线方向图综合的中期报告本文的研究主要是基于免疫算法的阵列天线方向图综合,旨在通过优化天线阵列指向性,提高天线阵列的工作效率和性能。本研究采用了免疫算法(IA)来解决阵列天线方向图综合的问题。IA是一种模拟人类免疫系统的计算方法,其主要特点是自适应性、学习能力和适应性。在本研究中,我们首先确定了天线阵列的优化目标,即最小化阵列指向性的旁瓣,并同时提高主瓣的功率。然后,我们设计了一个适应性函数,用于评价每个阵列的指向性性能。该适应性函数根据特定的权重系数和阵列中各个天线元素的水平和垂直极化

基于变异田口算法的阵列天线方向图综合.docx
基于变异田口算法的阵列天线方向图综合随着科技的进步和应用的需求,阵列天线在通信、雷达和卫星等领域中得到越来越广泛的应用。阵列天线由于具有方向性、增益高、干扰抑制等优点,因此成为通信系统和雷达系统中主要的天线选择。然而,随着天线阵列发展至复杂和大规模的情况下,天线的方向图设计问题也变得越来越复杂。为了解决这个问题,许多算法被提出并得到了广泛的应用。其中,基于变异田口算法的阵列天线方向图综合是比较热门的一种方法。变异田口算法(MMGA)是一种浓度分布的遗传算法,在对阵列天线的方向图优化中具有广泛的应用。该算法