
联邦学习参与节点选择优化方法、联邦学习方法及系统.pdf

慧娇****文章

1/10
2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

联邦学习参与节点选择优化方法、联邦学习方法及系统.pdf
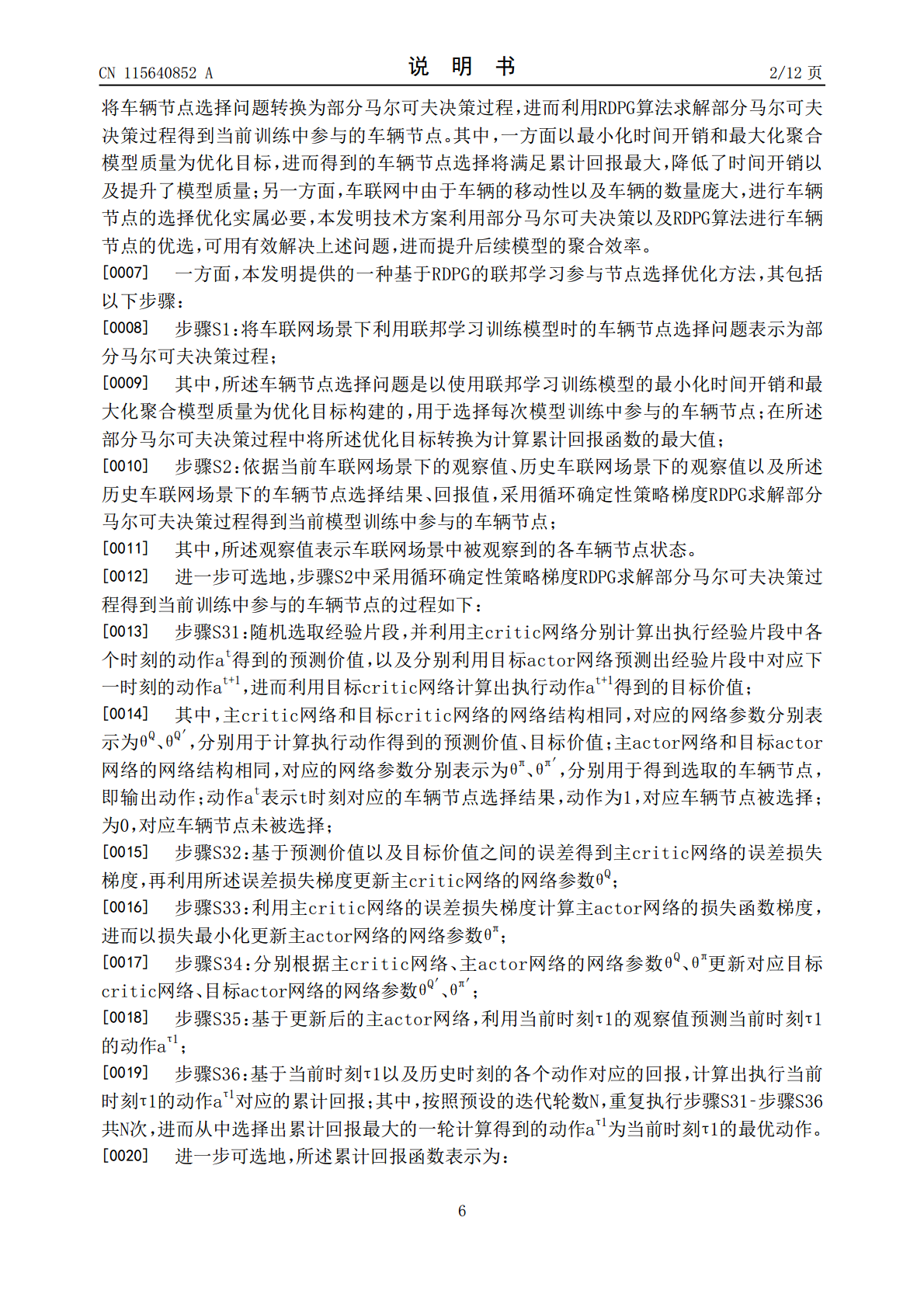
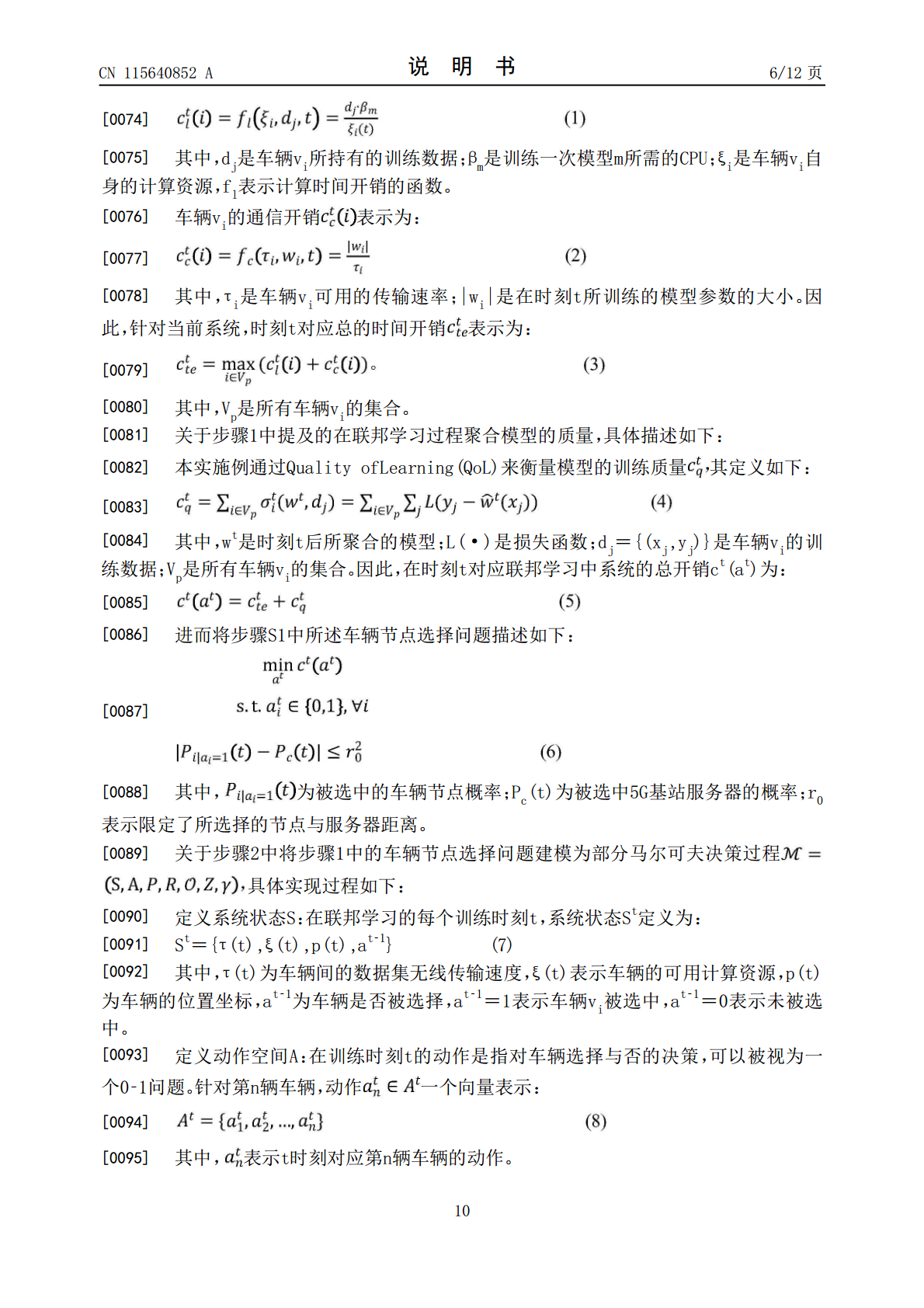
本发明公开了一种联邦学习参与节点选择优化方法、联邦学习方法及系统,本发明技术方案提出将车辆节点选择问题转换为部分马尔可夫决策过程,进而利用循环确定性策略梯度RDPG算法求解部分马尔可夫决策过程得到当前训练中参与的车辆节点。本发明通过所述节点选择优化方法,可以有效解决车联网场景下车辆等参与节点数目急剧增多的问题,此外,利用RDPG算法来寻找联邦学习中节点选择的最优解,提高联邦学习过程中全局聚合的效率与聚合质量。
联邦学习方法、联邦学习装置及联邦学习系统.pdf
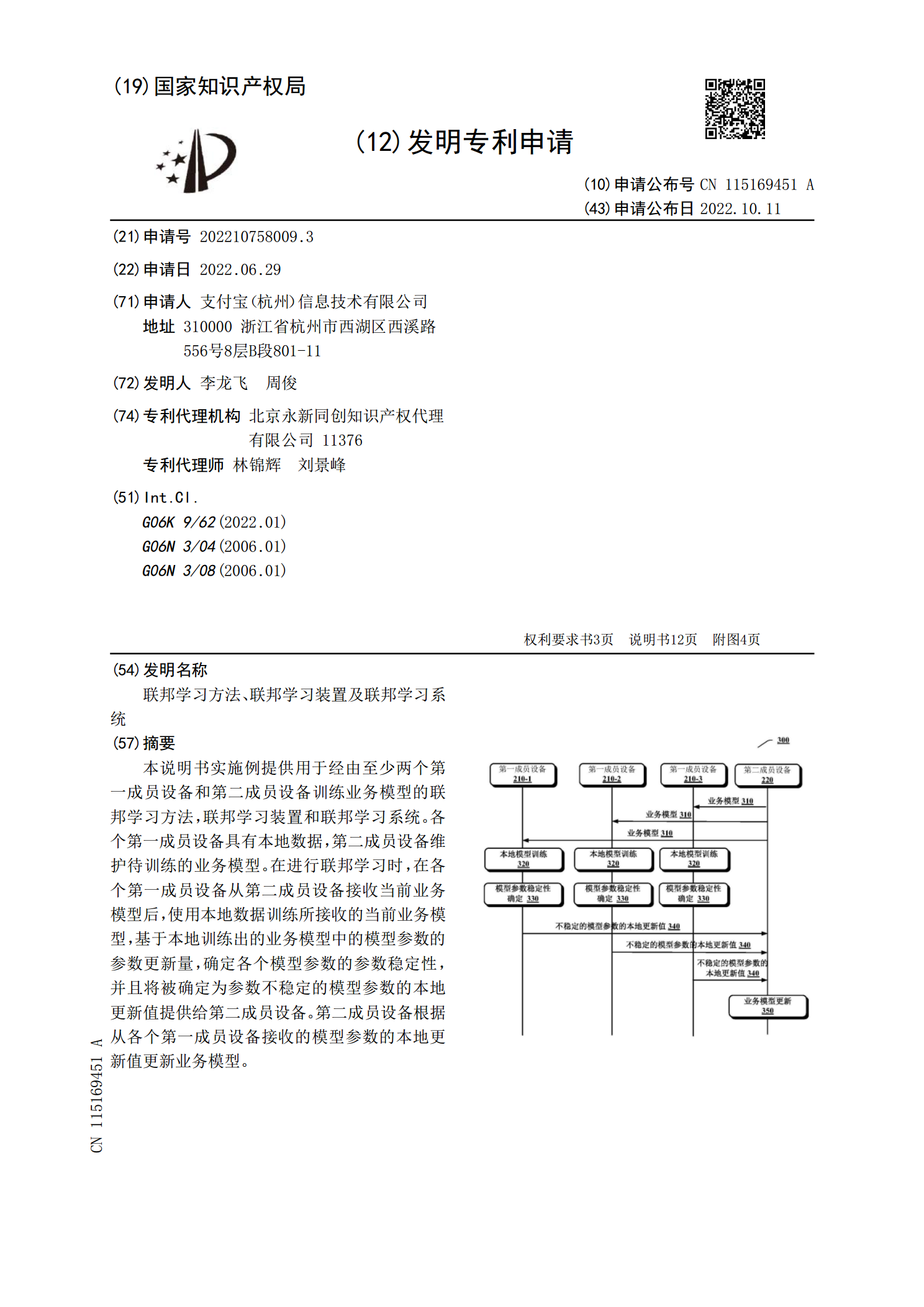
本说明书实施例提供用于经由至少两个第一成员设备和第二成员设备训练业务模型的联邦学习方法,联邦学习装置和联邦学习系统。各个第一成员设备具有本地数据,第二成员设备维护待训练的业务模型。在进行联邦学习时,在各个第一成员设备从第二成员设备接收当前业务模型后,使用本地数据训练所接收的当前业务模型,基于本地训练出的业务模型中的模型参数的参数更新量,确定各个模型参数的参数稳定性,并且将被确定为参数不稳定的模型参数的本地更新值提供给第二成员设备。第二成员设备根据从各个第一成员设备接收的模型参数的本地更新值更新业务模型。
联邦学习方法、联邦学习装置及联邦学习系统.pdf
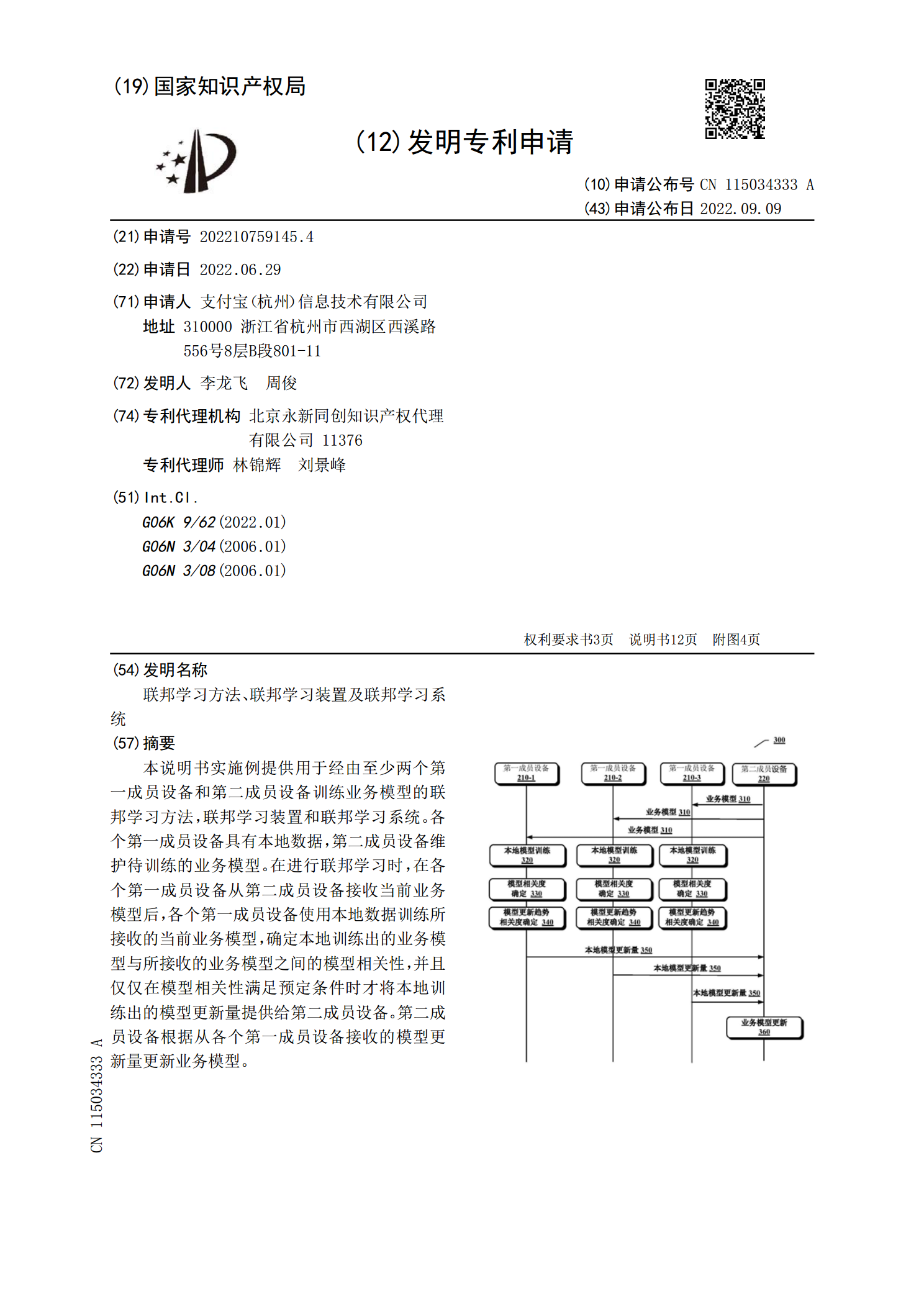
本说明书实施例提供用于经由至少两个第一成员设备和第二成员设备训练业务模型的联邦学习方法,联邦学习装置和联邦学习系统。各个第一成员设备具有本地数据,第二成员设备维护待训练的业务模型。在进行联邦学习时,在各个第一成员设备从第二成员设备接收当前业务模型后,各个第一成员设备使用本地数据训练所接收的当前业务模型,确定本地训练出的业务模型与所接收的业务模型之间的模型相关性,并且仅仅在模型相关性满足预定条件时才将本地训练出的模型更新量提供给第二成员设备。第二成员设备根据从各个第一成员设备接收的模型更新量更新业务模型。
联邦学习方法、装置及联邦学习系统.pdf
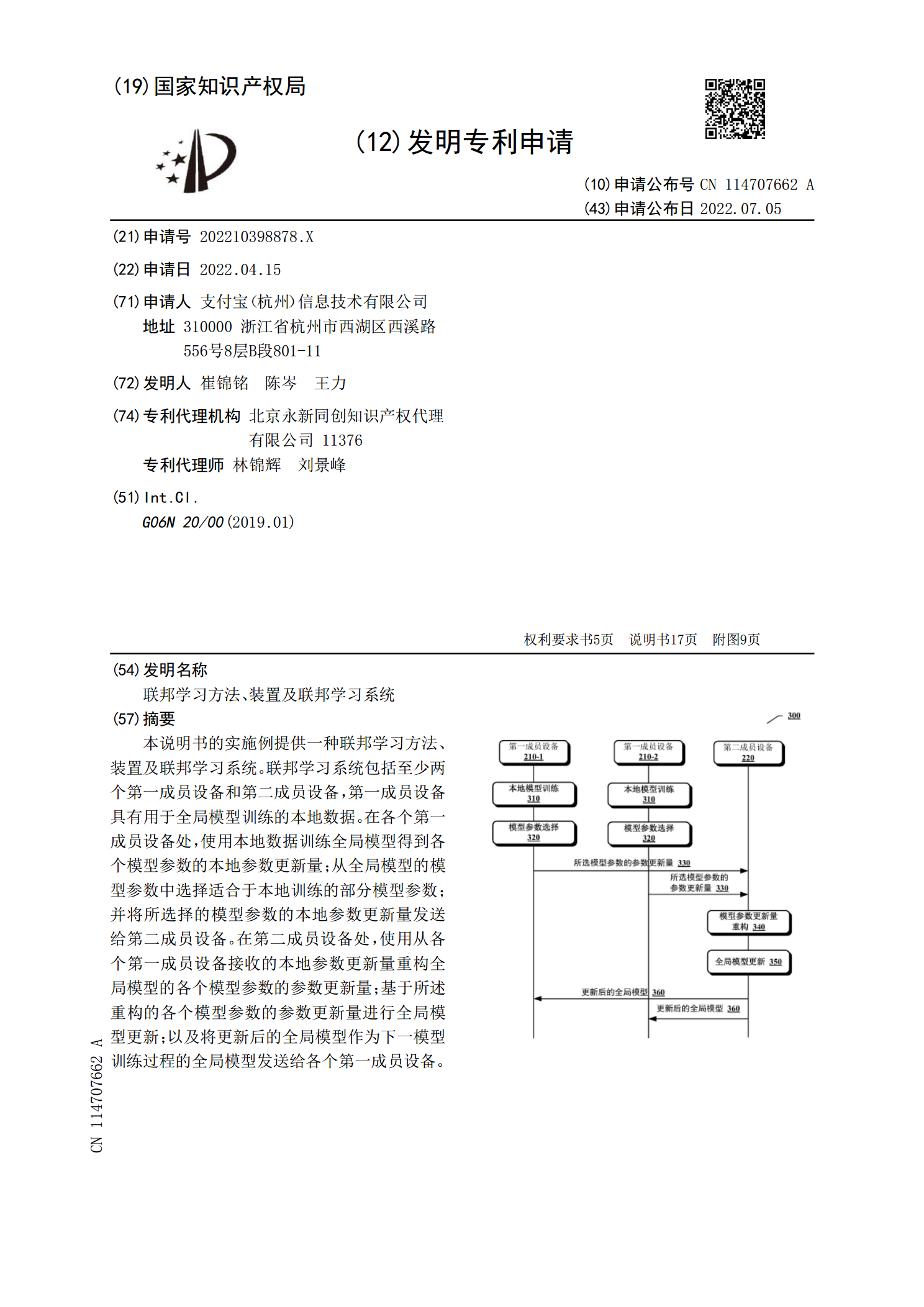
本说明书的实施例提供一种联邦学习方法、装置及联邦学习系统。联邦学习系统包括至少两个第一成员设备和第二成员设备,第一成员设备具有用于全局模型训练的本地数据。在各个第一成员设备处,使用本地数据训练全局模型得到各个模型参数的本地参数更新量;从全局模型的模型参数中选择适合于本地训练的部分模型参数;并将所选择的模型参数的本地参数更新量发送给第二成员设备。在第二成员设备处,使用从各个第一成员设备接收的本地参数更新量重构全局模型的各个模型参数的参数更新量;基于所述重构的各个模型参数的参数更新量进行全局模型更新;以及将更
一种联邦学习方法及联邦学习系统.pdf
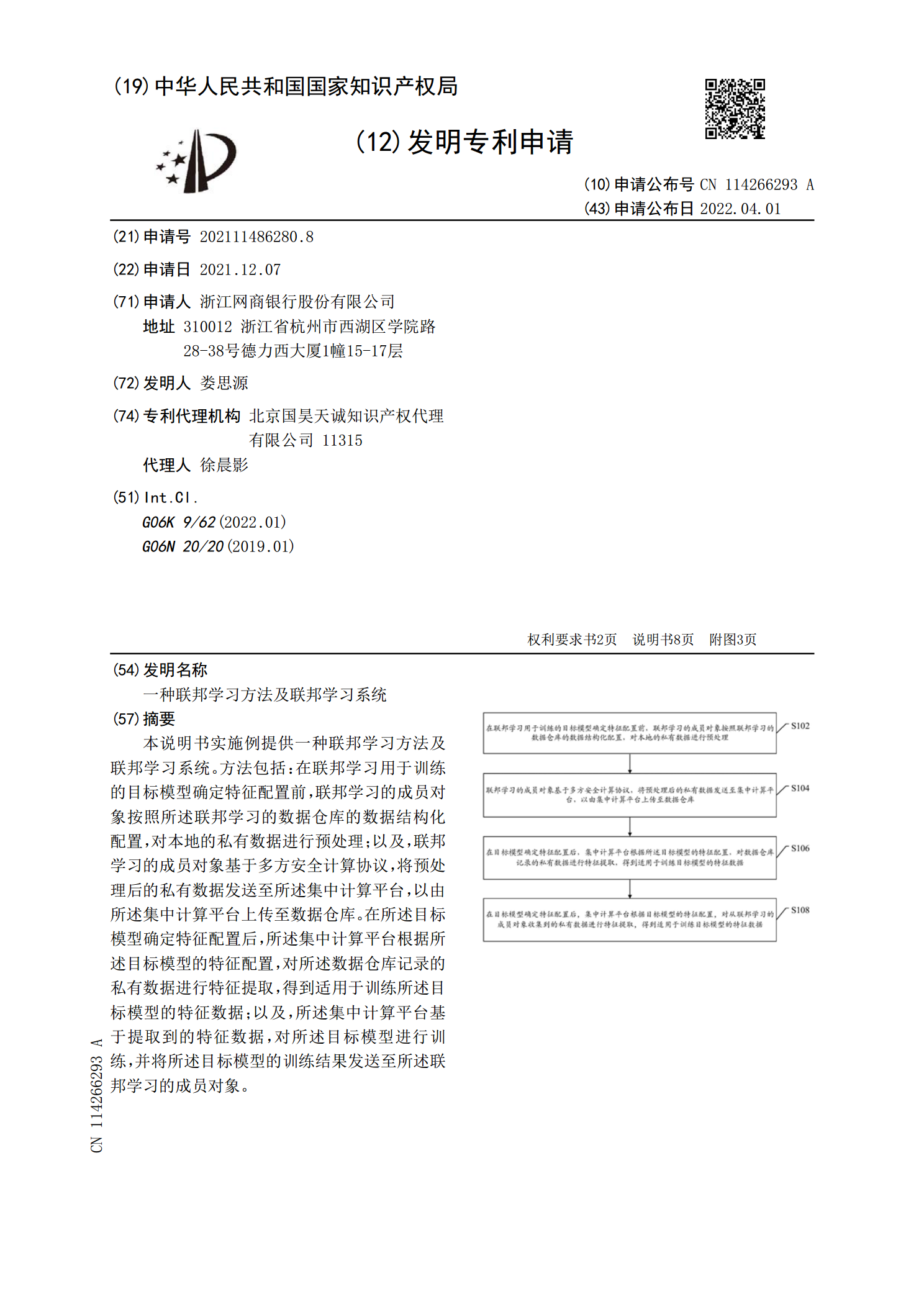
本说明书实施例提供一种联邦学习方法及联邦学习系统。方法包括:在联邦学习用于训练的目标模型确定特征配置前,联邦学习的成员对象按照所述联邦学习的数据仓库的数据结构化配置,对本地的私有数据进行预处理;以及,联邦学习的成员对象基于多方安全计算协议,将预处理后的私有数据发送至所述集中计算平台,以由所述集中计算平台上传至数据仓库。在所述目标模型确定特征配置后,所述集中计算平台根据所述目标模型的特征配置,对所述数据仓库记录的私有数据进行特征提取,得到适用于训练所述目标模型的特征数据;以及,所述集中计算平台基于提取到的特