
一种基于带有移动基站的分布式粒子群优化算法.pdf

盼易****君a


1/10

2/10

3/10

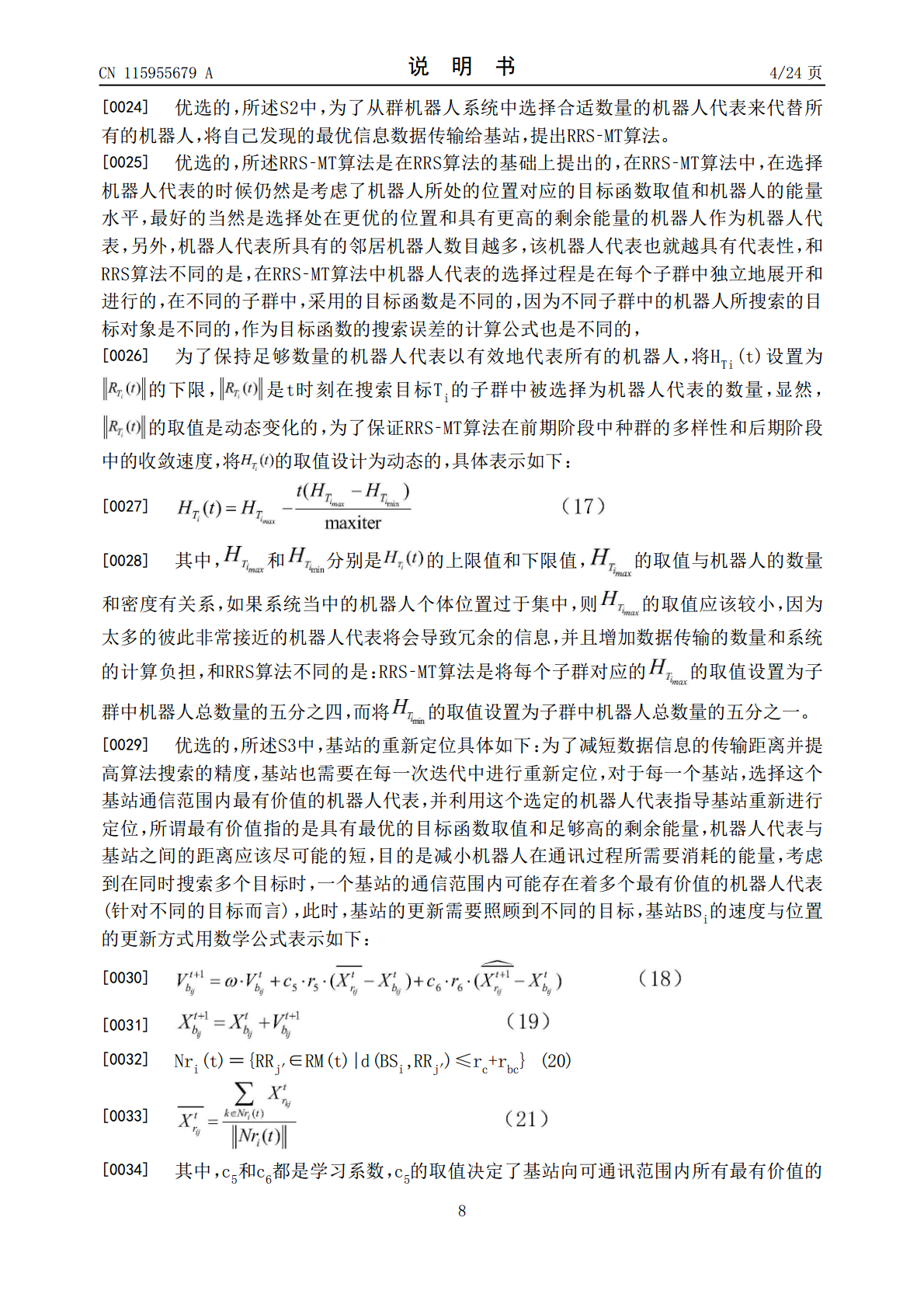
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共39页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于带有移动基站的分布式粒子群优化算法.pdf
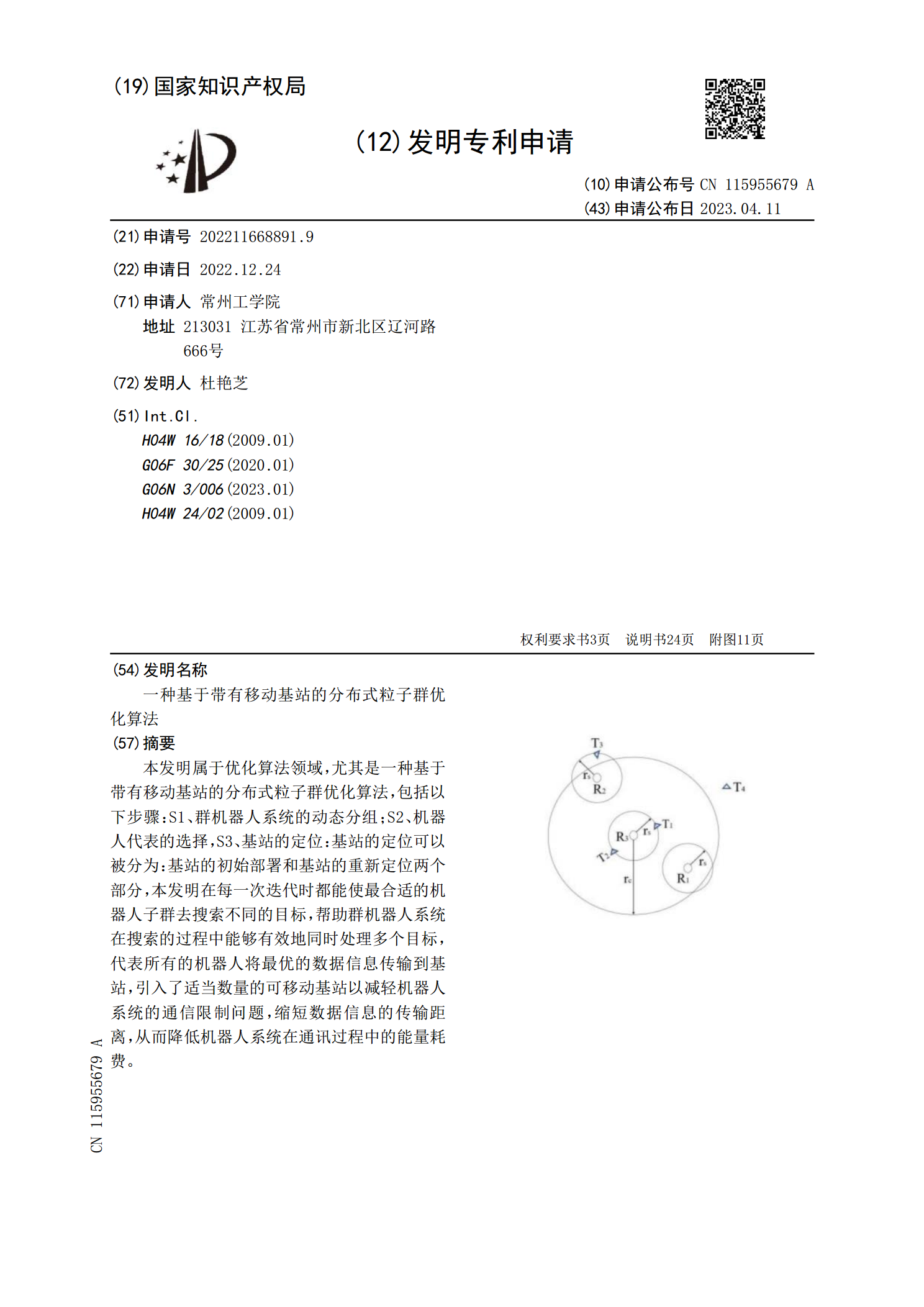
本发明属于优化算法领域,尤其是一种基于带有移动基站的分布式粒子群优化算法,包括以下步骤:S1、群机器人系统的动态分组;S2、机器人代表的选择,S3、基站的定位:基站的定位可以被分为:基站的初始部署和基站的重新定位两个部分,本发明在每一次迭代时都能使最合适的机器人子群去搜索不同的目标,帮助群机器人系统在搜索的过程中能够有效地同时处理多个目标,代表所有的机器人将最优的数据信息传输到基站,引入了适当数量的可移动基站以减轻机器人系统的通信限制问题,缩短数据信息的传输距离,从而降低机器人系统在通讯过程中的能量耗费。

基于粒子群算法的分布式电源优化配置.docx
基于粒子群算法的分布式电源优化配置随着先进技术的快速发展和能源需求的不断增长,分布式电源(DistributedGeneration,简称DG)已经成为一个热门话题。但是,DG的优化配置一直是一个复杂而困难的问题。近年来,粒子群算法(ParticleSwarmOptimization,简称PSO)被广泛应用于各种优化问题,包括电力系统中DG的优化配置。本文旨在介绍基于PSO算法的分布式电源优化配置的方法,探讨其在不同应用场景中的适应性和优缺点。一、分布式电源优化配置的问题及意义传统的电力系统主要由大型发电

一种基于双子群的改进粒子群优化算法.docx
一种基于双子群的改进粒子群优化算法基于双子群的改进粒子群优化算法摘要:粒子群优化算法是一种基于群体智能的全局优化算法,具有简单、易于实现、快速收敛等优点。然而,在处理复杂问题时,传统的粒子群优化算法存在收敛速度慢、易陷入局部最优等问题。为了克服这些问题,本文提出了一种基于双子群的改进粒子群优化算法。该算法通过引入双子群概念,将种群分为两个子群,以促进多样性和探索能力。通过实验结果的对比分析,证明了该算法在解决复杂问题上的优越性。关键词:粒子群优化算法;双子群;多样性;探索能力;局部最优1.引言粒子群优化算

一种基于浓度的粒子群优化算法.docx
一种基于浓度的粒子群优化算法基于浓度的粒子群优化算法摘要:粒子群优化算法(ParticleSwarmOptimization,PSO)是一种基于群体智能的优化算法,模拟了鸟群或鱼群的行为规律。然而,传统的PSO算法存在着收敛速度慢、易陷入局部最优等问题。为了解决这些问题,本论文提出了一种基于浓度的粒子群优化算法,通过引入浓度机制,改善了粒子群的搜索性能与收敛速度。实验结果表明,所提算法在解决优化问题时具有较好的性能和鲁棒性。1.引言粒子群优化算法是一种全局优化算法,基于群体智能的思想,模拟了鸟群或鱼群等群

基于粒子群算法的带有运输衔接的应急物资运输路径优化问题.docx
基于粒子群算法的带有运输衔接的应急物资运输路径优化问题随着社会的不断发展,自然灾害及其他紧急事件频发,因此设计一个高效的应急物资运输路径显得尤为重要。在无人驾驶物流背景下,如何保证应急物资的快速运送,是关键人们所关心的问题。本文旨在通过粒子群算法来进行应急物资运输路径优化。1.粒子群算法粒子群算法又称为PSO算法,是一种群体智能算法。其具有收敛速度快、全局搜索能力强等特点,在各种优化问题中得到了广泛应用。PSO算法主要是通过模拟群体中领头羊和随从羊的坐标移动过程,在搜索空间中快速找到全局最优解。2.应急物