
基于AM算法的多视角高分辨MIMO雷达关联成像方法及装置.pdf

努力****骞北


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于AM算法的多视角高分辨MIMO雷达关联成像方法及装置.pdf
本发明公开一种基于AM算法的多视角高分辨MIMO雷达关联成像方法及装置,所述方法同时考虑收发阵元位置误差的影响,将其等效为收发相位误差,并借鉴AM算法交替迭代思想,分别对收发阵元位置误差和目标散射系数进行联合估计,并通过估计的阵元位置误差更新参考信号,经过不断迭代,实现对阵元位置误差修正,得到高分辨多视角MIMO雷达关联成像结果。本发明可对收发阵元位置误差修正,得到高分辨的多视角综合成像结果。
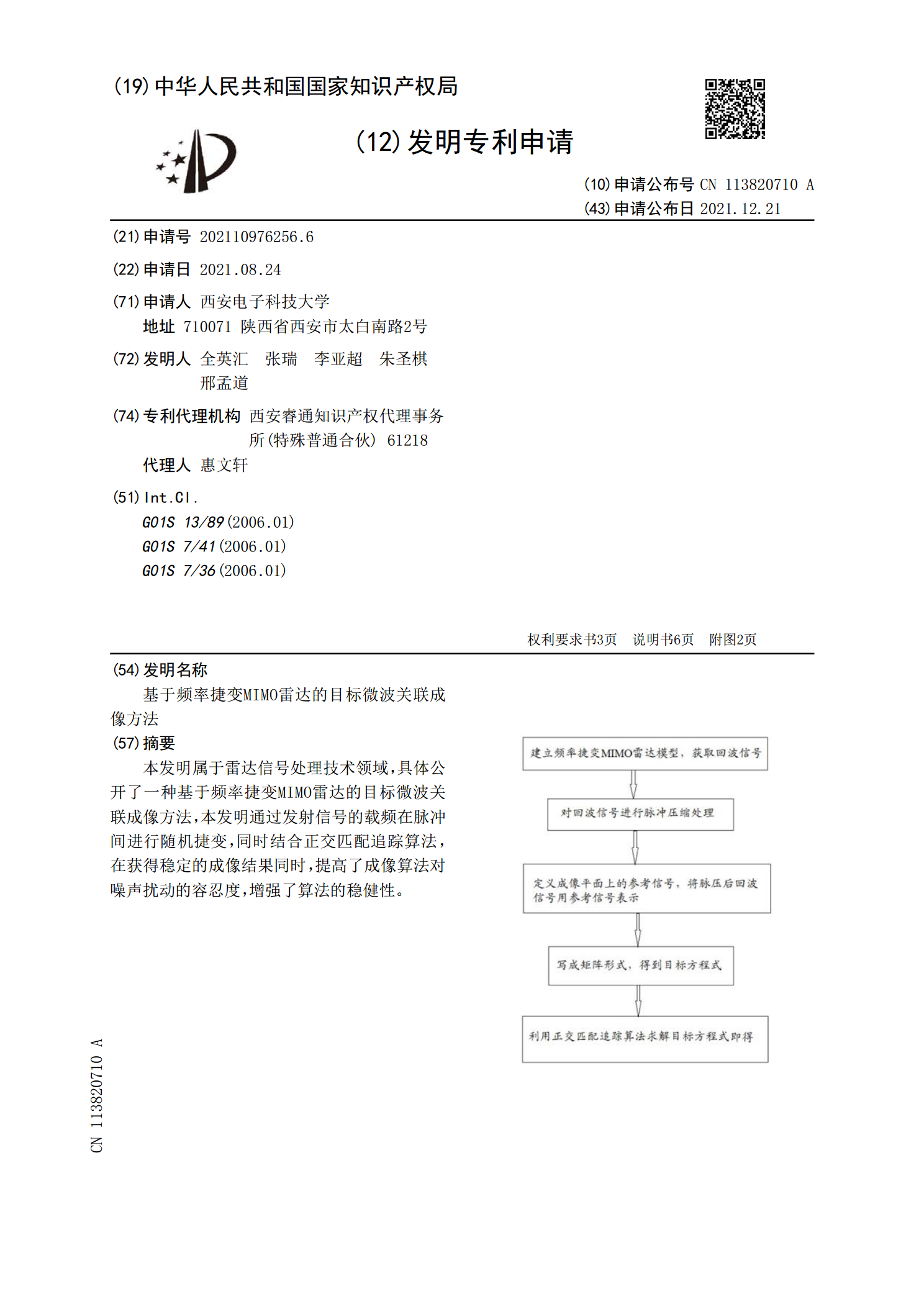
基于频率捷变MIMO雷达的目标微波关联成像方法.pdf
本发明属于雷达信号处理技术领域,具体公开了一种基于频率捷变MIMO雷达的目标微波关联成像方法,本发明通过发射信号的载频在脉冲间进行随机捷变,同时结合正交匹配追踪算法,在获得稳定的成像结果同时,提高了成像算法对噪声扰动的容忍度,增强了算法的稳健性。

基于MIMO阵列与压缩感知的雷达前视超分辨成像方法研究.docx
基于MIMO阵列与压缩感知的雷达前视超分辨成像方法研究基于MIMO阵列与压缩感知的雷达前视超分辨成像方法研究摘要:随着科技的不断进步,雷达成像技术得到了广泛应用。其中,超分辨成像是提高雷达分辨率的一种有效方法。然而,传统的雷达超分辨成像方法在资源利用率和成像质量方面存在一定的局限性。针对这个问题,本文提出了一种基于MIMO阵列与压缩感知相结合的雷达前视超分辨成像方法。该方法通过利用MIMO阵列的多通道信息和压缩感知的理论,实现了对目标物体的高分辨成像。实验结果表明,该方法在保证成像质量的同时,还显著提高了
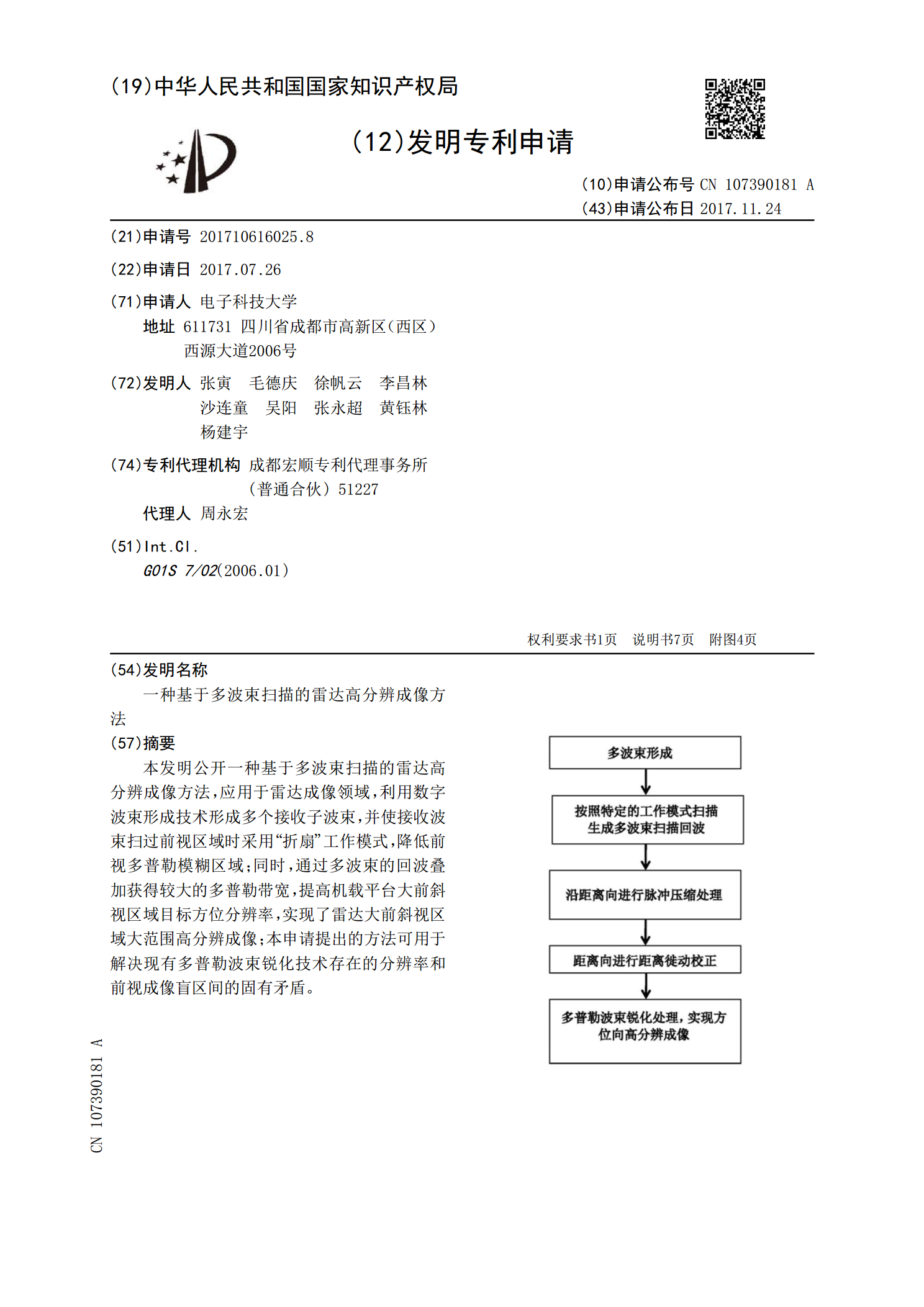
一种基于多波束扫描的雷达高分辨成像方法.pdf
本发明公开一种基于多波束扫描的雷达高分辨成像方法,应用于雷达成像领域,利用数字波束形成技术形成多个接收子波束,并使接收波束扫过前视区域时采用“折扇”工作模式,降低前视多普勒模糊区域;同时,通过多波束的回波叠加获得较大的多普勒带宽,提高机载平台大前斜视区域目标方位分辨率,实现了雷达大前斜视区域大范围高分辨成像;本申请提出的方法可用于解决现有多普勒波束锐化技术存在的分辨率和前视成像盲区间的固有矛盾。

基于压缩感知的雷达目标距离超分辨成像算法.pptx
,目录PartOnePartTwo压缩感知基本概念信号的稀疏表示测量矩阵的设计PartThree雷达信号处理概述距离分辨率的概念超分辨成像算法原理PartFour算法流程实验结果与分析算法优势与局限性PartFive优化测量矩阵迭代优化算法算法性能评估PartSix在雷达探测领域的应用在其他领域的应用前景未来研究方向与挑战THANKS