
主轴-刀柄结合面非线性动态特性参数识别方法.pdf

Jo****34

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
主轴-刀柄结合面非线性动态特性参数识别方法.pdf
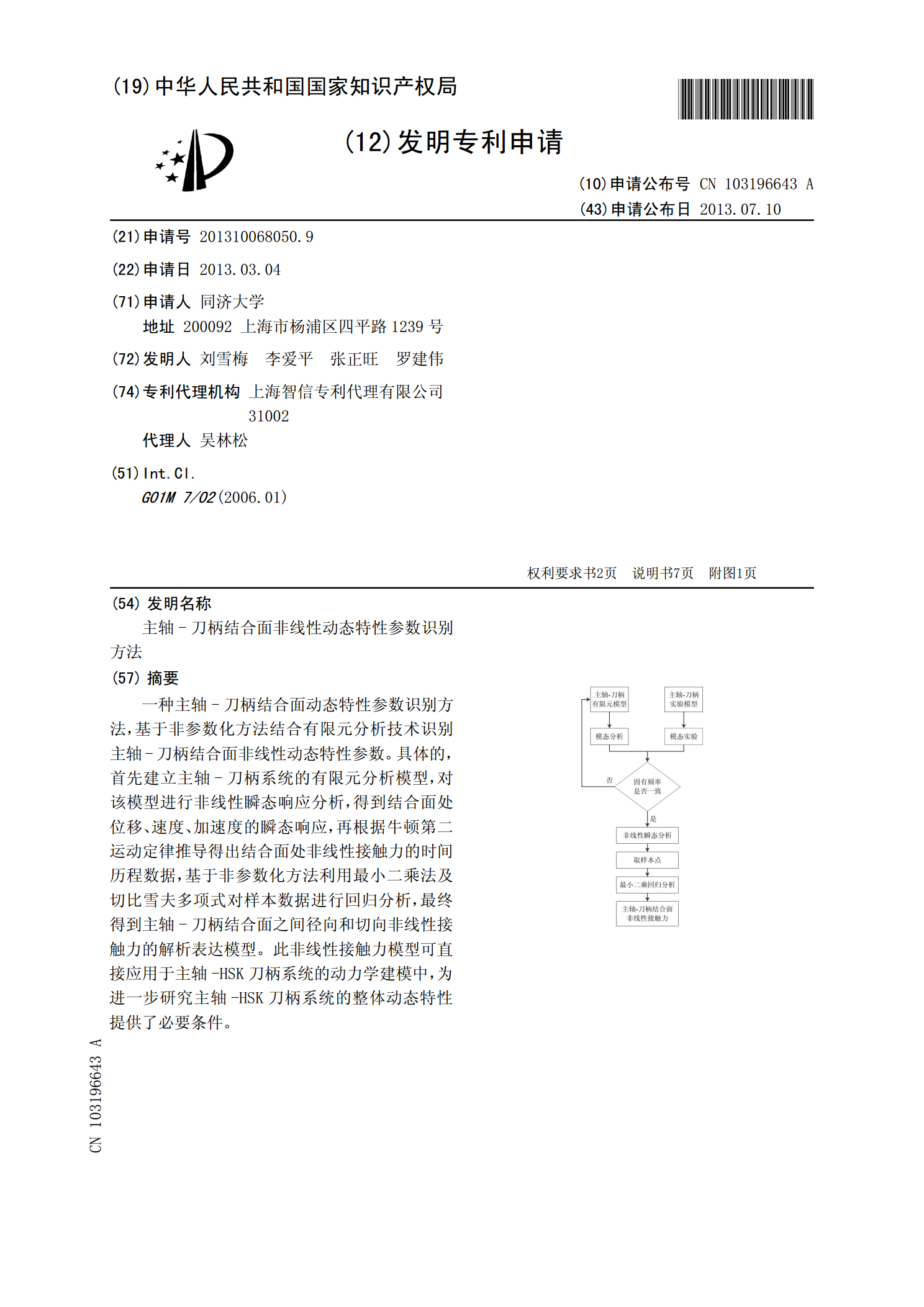
一种主轴-刀柄结合面动态特性参数识别方法,基于非参数化方法结合有限元分析技术识别主轴-刀柄结合面非线性动态特性参数。具体的,首先建立主轴-刀柄系统的有限元分析模型,对该模型进行非线性瞬态响应分析,得到结合面处位移、速度、加速度的瞬态响应,再根据牛顿第二运动定律推导得出结合面处非线性接触力的时间历程数据,基于非参数化方法利用最小二乘法及切比雪夫多项式对样本数据进行回归分析,最终得到主轴-刀柄结合面之间径向和切向非线性接触力的解析表达模型。此非线性接触力模型可直接应用于主轴-HSK刀柄系统的动力学建模中,为进

机床滑动导轨结合面动态特性参数识别试验研究的开题报告.docx
机床滑动导轨结合面动态特性参数识别试验研究的开题报告【背景与研究意义】机床的加工精度和性能直接关系到产品的质量和市场竞争力,而机床导轨作为机床的关键部件之一,其结构和特性对机床的性能有着至关重要的影响。然而,机床导轨的结合面是高度精密制造的表面,且在使用过程中会受到多种因素的影响,例如温度、负载等,导致结合面的动态特性参数不断变化,进而影响机床的加工精度和性能。因此,对机床导轨结合面动态特性参数进行准确地识别与监测研究,有重要实用意义。【研究内容及方案】本研究将针对机床导轨结合面的动态特性参数进行试验研究

数控机床滑动导轨结合面动态特性参数测试及应用研究的任务书.docx
数控机床滑动导轨结合面动态特性参数测试及应用研究的任务书任务书一、任务背景数控机床已经成为现代制造业中不可或缺的重要设备之一。其中,滑动导轨是数控机床的重要组成部分之一,直接影响着机床的精度、稳定性和寿命。为了确保数控机床的高精度、高效率和长寿命,必须对滑动导轨的动态特性参数进行深入研究和测试,以便更好地指导机床的设计、生产和维护。二、任务目标本次任务的目标是针对数控机床的滑动导轨结合面动态特性参数进行测试和研究,探究其影响因素、测试方法和分析技术,并将研究成果应用于实际生产中。具体任务目标如下:1.研究

基于分形理论的接触特性研究及其在刀柄-主轴结合部的应用的任务书.docx
基于分形理论的接触特性研究及其在刀柄-主轴结合部的应用的任务书任务书一、研究背景随着工业化的进步,现代制造工艺也越来越高级和复杂。其中,高速加工是一种常见的加工方式,它可以极大地缩短制造产品所需的时间,并且提高了加工精度和表面质量。然而,高速加工也带来了一些问题,例如切削力过大、表面异常粗糙和刀具磨损等。这些问题无疑制约了高速加工的进一步应用。因此,如何有效地解决这些问题成为了当前的研究重点。接触特性是制约切削性能的重要因素之一,而分形理论是一种有效的分析接触特性的方法。基于分形理论的接触特性研究可以帮助

数控机床结合面动态特性参数数据库管理系统设计与开发的开题报告.docx
数控机床结合面动态特性参数数据库管理系统设计与开发的开题报告一、选题背景随着工业化的发展和科技水平的提高,数控技术在制造业中得到了广泛的应用。数控机床具有高精度、高效率、高稳定性等优点,已成为现代制造业的核心设备之一。在数控机床的工作中,结合面动态特性参数是非常重要的一个参数,它能够反映机床加工时的稳定性,对于提高加工质量、降低成本具有重要的意义。因此,设计一套数控机床结合面动态特性参数数据库管理系统,对于实现对机床加工过程的监控和优化具有重要的意义。二、选题意义(1)数控机床结合面动态特性参数是机床加工