
一种基于总线舵机控制的智能机器人控制系统.pdf

猫巷****奕声

1/6

2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于总线舵机控制的智能机器人控制系统.pdf
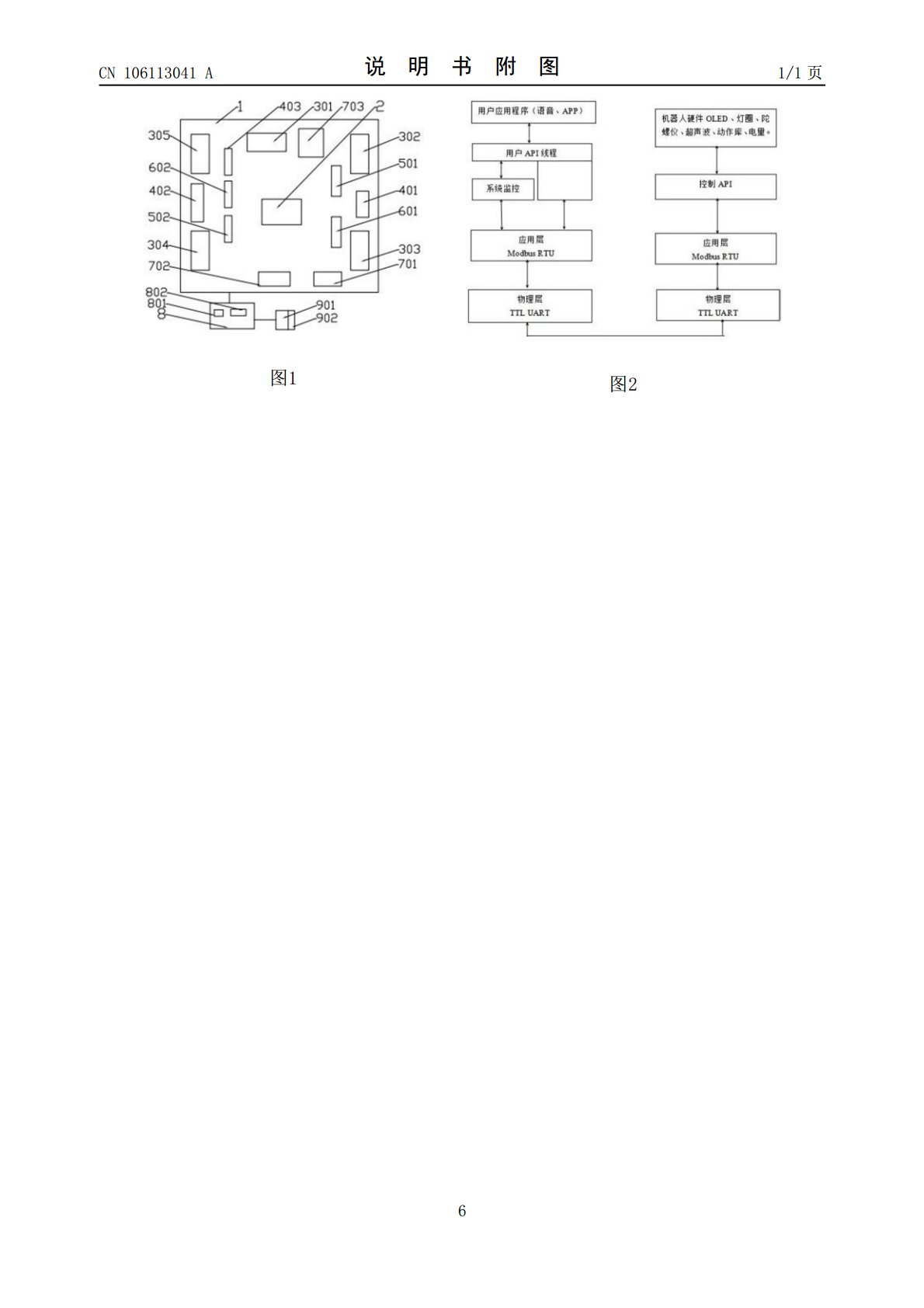
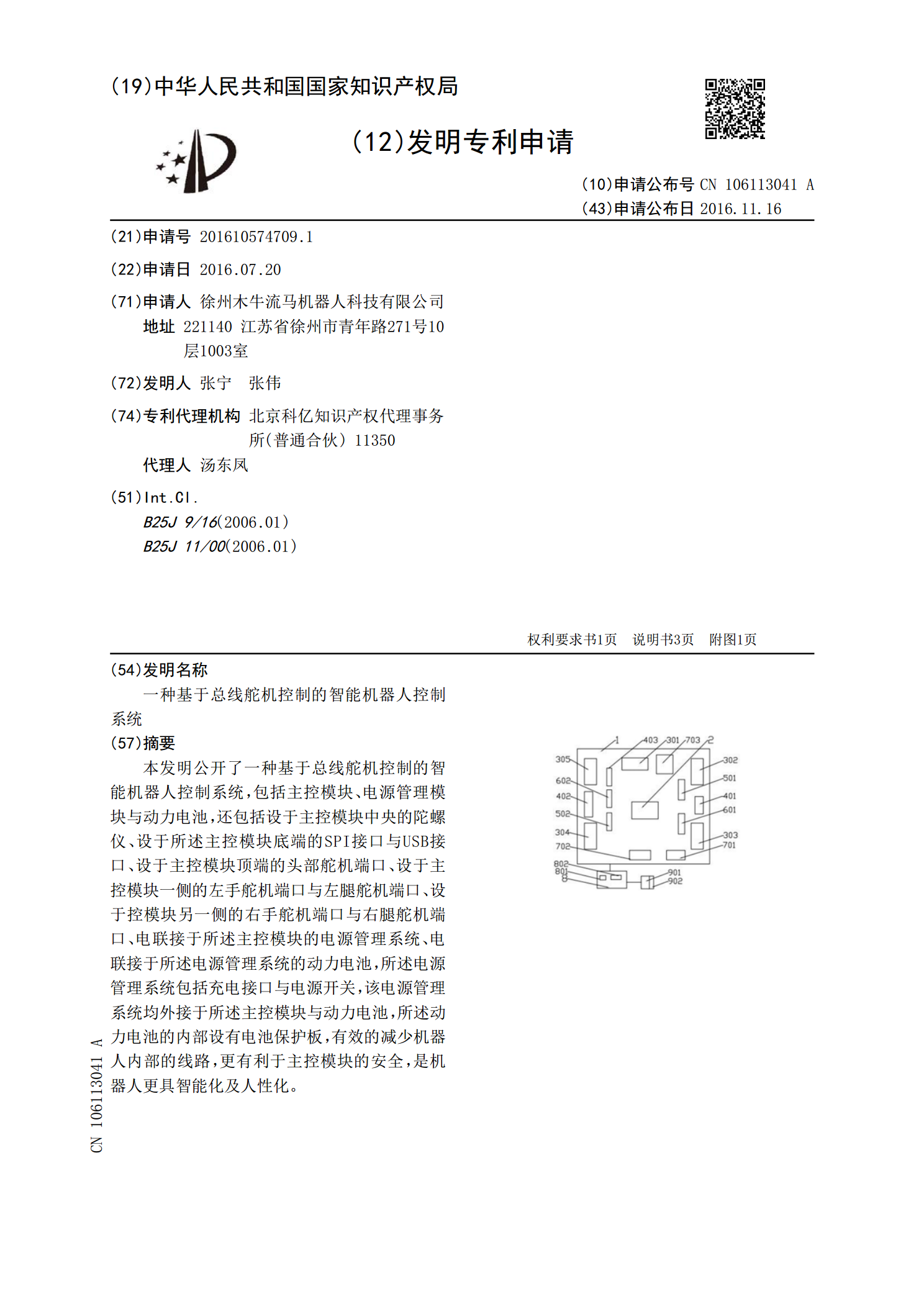
本发明公开了一种基于总线舵机控制的智能机器人控制系统,包括主控模块、电源管理模块与动力电池,还包括设于主控模块中央的陀螺仪、设于所述主控模块底端的SPI接口与USB接口、设于主控模块顶端的头部舵机端口、设于主控模块一侧的左手舵机端口与左腿舵机端口、设于控模块另一侧的右手舵机端口与右腿舵机端口、电联接于所述主控模块的电源管理系统、电联接于所述电源管理系统的动力电池,所述电源管理系统包括充电接口与电源开关,该电源管理系统均外接于所述主控模块与动力电池,所述动力电池的内部设有电池保护板,有效的减少机器人内部的线
一种基于CAN总线的两余度舵机控制系统.pdf
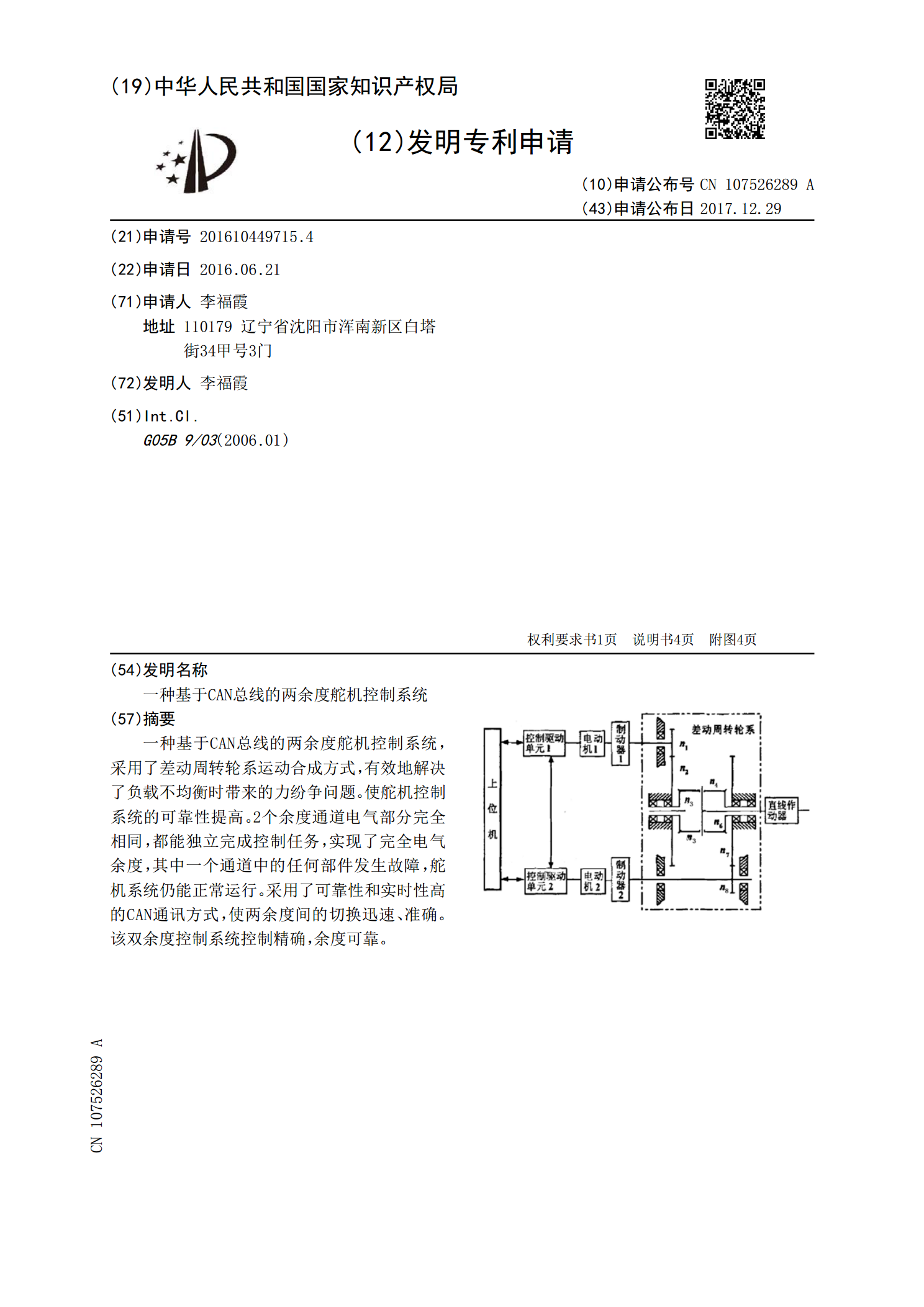
一种基于CAN总线的两余度舵机控制系统,采用了差动周转轮系运动合成方式,有效地解决了负载不均衡时带来的力纷争问题。使舵机控制系统的可靠性提高。2个余度通道电气部分完全相同,都能独立完成控制任务,实现了完全电气余度,其中一个通道中的任何部件发生故障,舵机系统仍能正常运行。采用了可靠性和实时性高的CAN通讯方式,使两余度间的切换迅速、准确。该双余度控制系统控制精确,余度可靠。

基于CAN总线的智能拆除机器人控制系统设计的任务书.docx
基于CAN总线的智能拆除机器人控制系统设计的任务书任务书任务名称:基于CAN总线的智能拆除机器人控制系统设计任务背景:近几年来,随着城市建设的不断发展以及旧城改造的深入推进,对建筑物的拆除和重建需求日益增加。传统的拆除方式往往需要大量的人力和物力投入,而且存在一定的安全隐患。因此,如何有效地提高拆除效率,保障工人的安全,已经成为当前急需解决的问题。智能拆除机器人作为一种新型的拆除设备,具有操作简便、效率高、安全性强等优点,逐渐得到了广泛的关注和应用。目前,拆除机器人的控制系统主要采用了串行总线通讯技术,但
一种基于KNX总线接入设备的智能控制系统.pdf
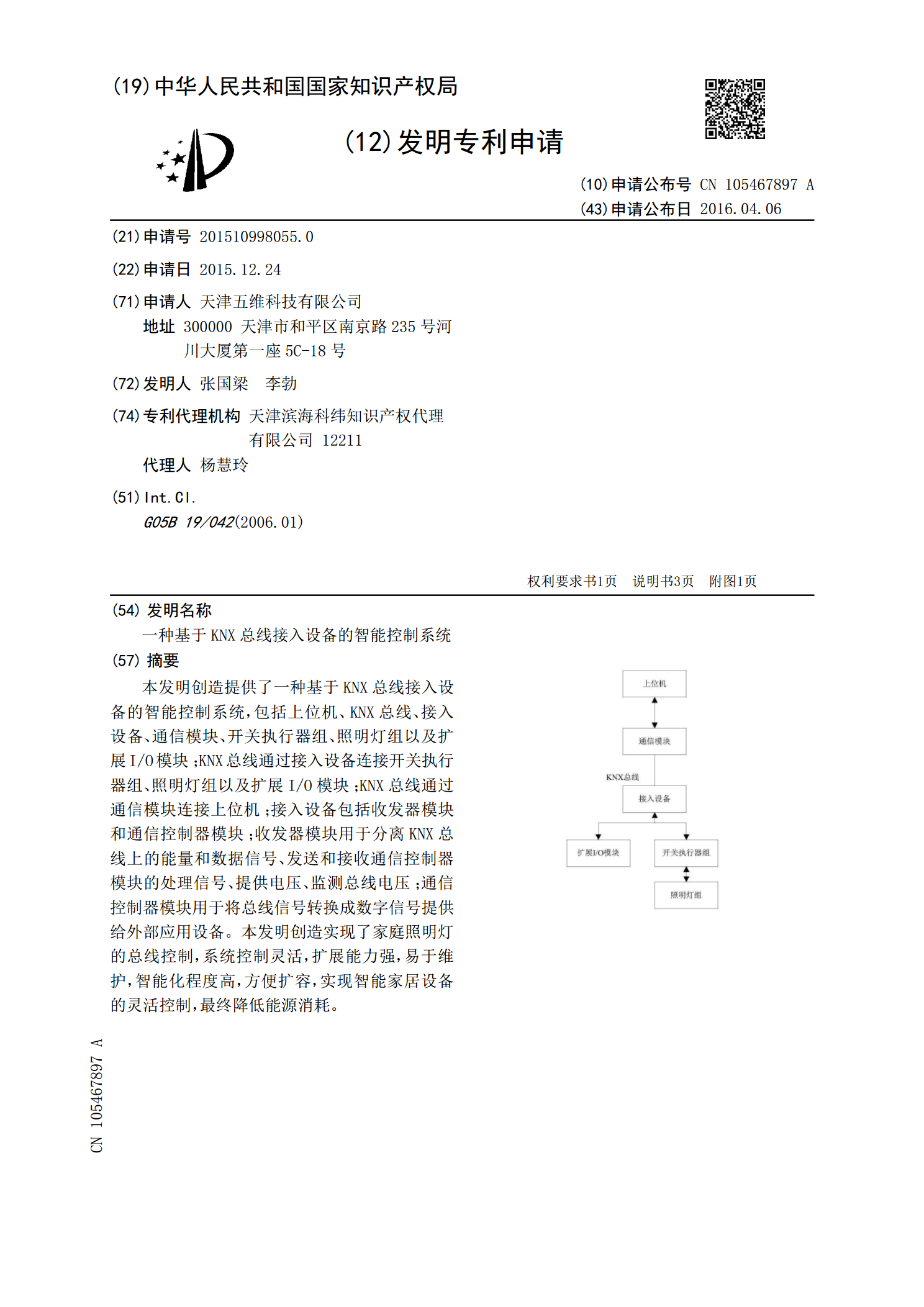
本发明创造提供了一种基于KNX总线接入设备的智能控制系统,包括上位机、KNX总线、接入设备、通信模块、开关执行器组、照明灯组以及扩展I/O模块;KNX总线通过接入设备连接开关执行器组、照明灯组以及扩展I/O模块;KNX总线通过通信模块连接上位机;接入设备包括收发器模块和通信控制器模块;收发器模块用于分离KNX总线上的能量和数据信号、发送和接收通信控制器模块的处理信号、提供电压、监测总线电压;通信控制器模块用于将总线信号转换成数字信号提供给外部应用设备。本发明创造实现了家庭照明灯的总线控制,系统控制灵活,扩
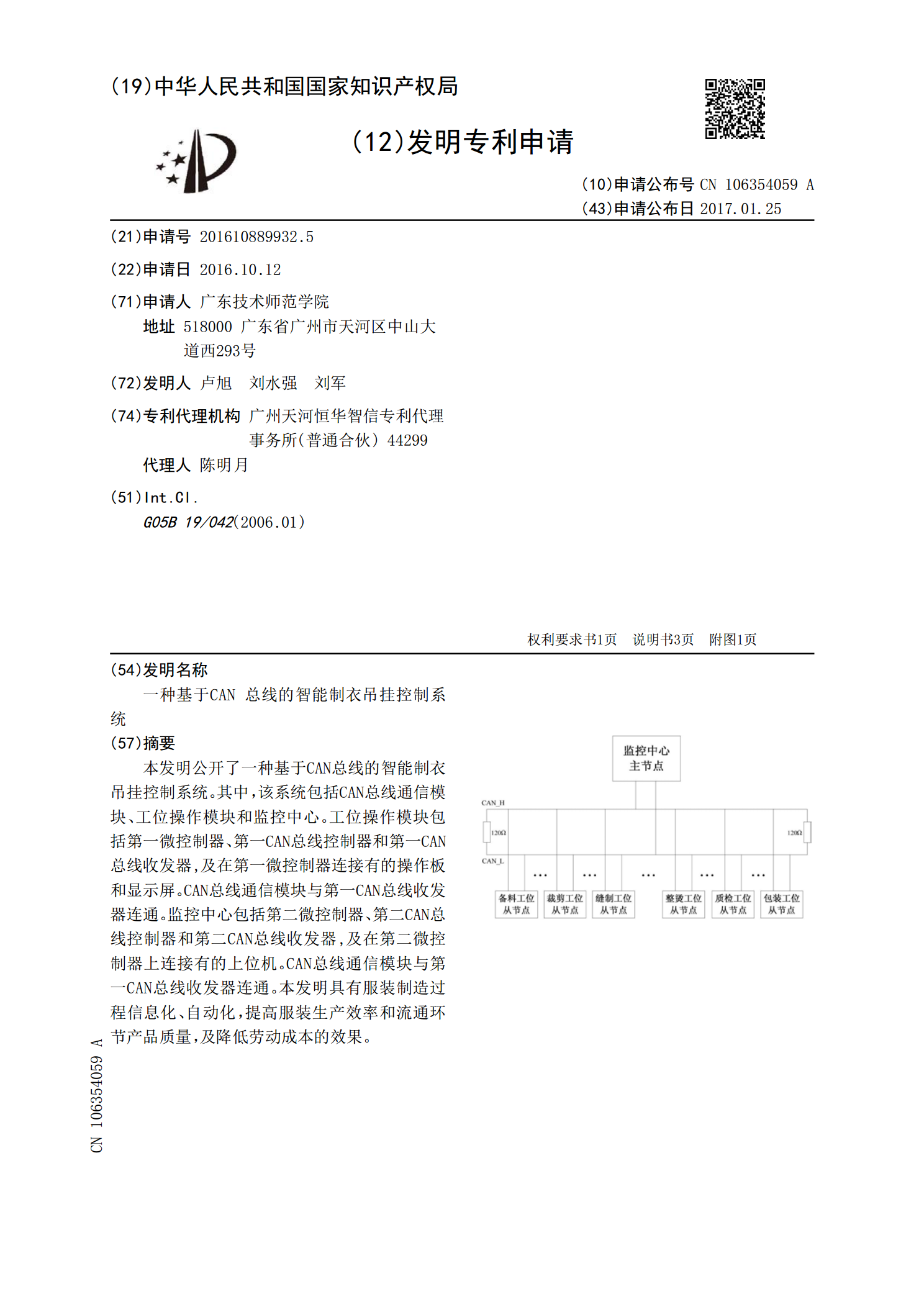
一种基于CAN 总线的智能制衣吊挂控制系统.pdf
本发明公开了一种基于CAN总线的智能制衣吊挂控制系统。其中,该系统包括CAN总线通信模块、工位操作模块和监控中心。工位操作模块包括第一微控制器、第一CAN总线控制器和第一CAN总线收发器,及在第一微控制器连接有的操作板和显示屏。CAN总线通信模块与第一CAN总线收发器连通。监控中心包括第二微控制器、第二CAN总线控制器和第二CAN总线收发器,及在第二微控制器上连接有的上位机。CAN总线通信模块与第一CAN总线收发器连通。本发明具有服装制造过程信息化、自动化,提高服装生产效率和流通环节产品质量,及降低劳动成