
基于动力学参数辨识的工业机器人力/位柔顺控制方法.pdf

Ch****91

1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于动力学参数辨识的工业机器人力/位柔顺控制方法.pdf
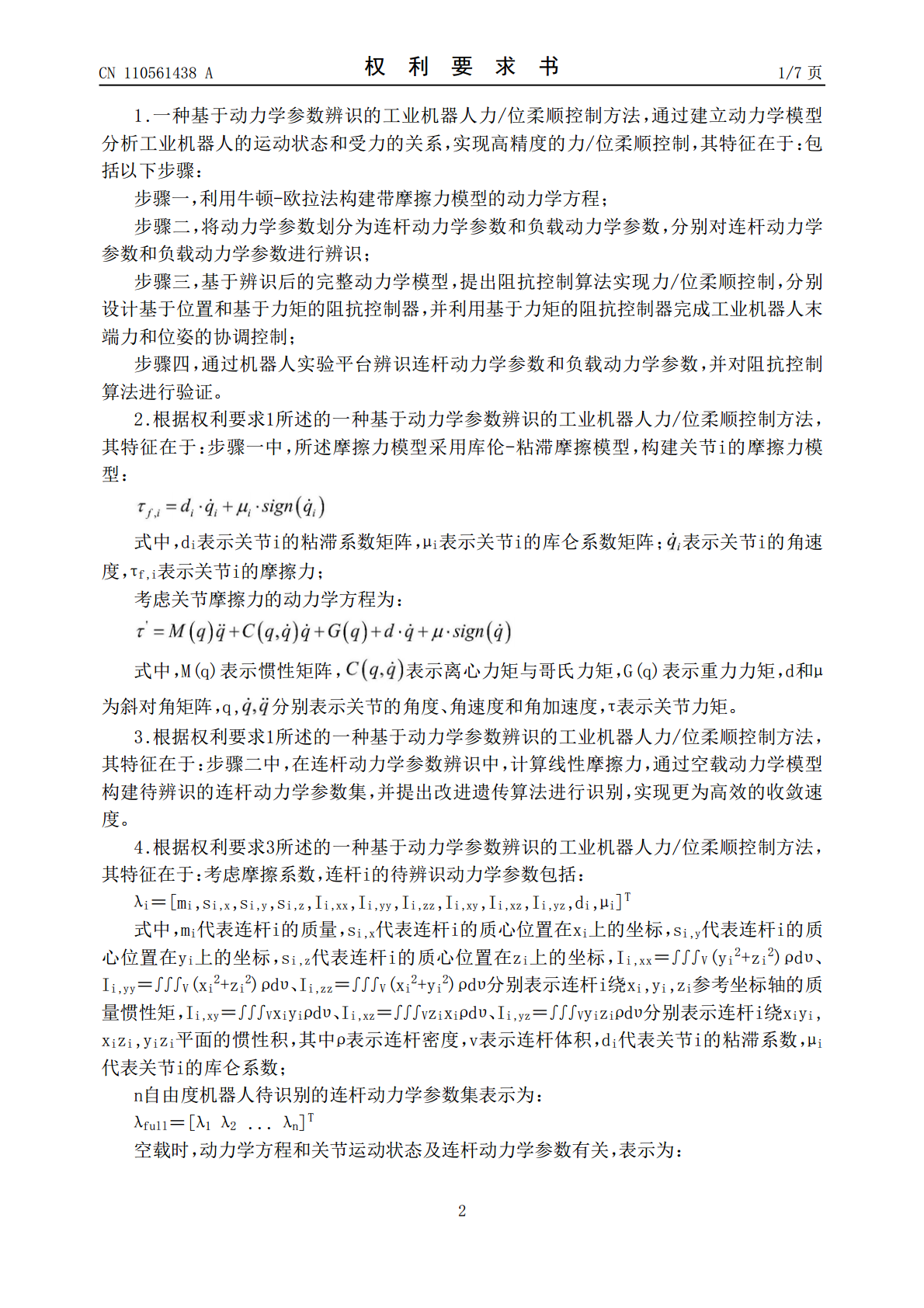
本发明公开了一种基于动力学参数辨识的工业机器人力/位柔顺控制方法,包括以下步骤:利用牛顿‑欧拉法构建带摩擦力模型的动力学方程;将动力学参数划分为连杆动力学参数和负载动力学参数;基于辨识后的完整动力学模型,提出阻抗控制算法实现力/位柔顺控制;通过机器人实验平台辨识连杆动力学参数和负载动力学参数,并对阻抗控制算法进行验证。本发明实现了工业机器人末端力/位柔顺控制,通过六连杆机器人实验平台辨识了连杆动力学参数和负载动力学参数,并对阻抗控制算法进行验证,在机器人通过有障碍轨迹时产生了最大为0.05mm的位置误差,

工业机器人动力学参数辨识与自适应控制方法研究.docx
工业机器人动力学参数辨识与自适应控制方法研究摘要本文针对工业机器人动力学参数辨识与自适应控制方法研究进行了探讨。首先,介绍了工业机器人的概念及应用,重点描述了机器人运动学和动力学模型的建立方法。然后,基于机器人动力学模型,对机器人动力学参数辨识进行了研究,阐述了常用的参数辨识方法,并进行了比较和分析。最后,针对动力学参数辨识结果的质量不稳定以及工业机器人在复杂工况下的控制难题,提出了基于自适应控制算法的控制方案,将自适应控制算法集成到机器人控制器中,实现了对机器人动态性能的控制和优化。关键词:工业机器人,

工业机器人动力学参数辨识方法研究.docx
工业机器人动力学参数辨识方法研究一、内容简述本文主要研究了工业机器人的动力学参数辨识问题。介绍了研究背景和意义,然后对现有的动力学参数辨识方法进行了综述,并分析了它们的优缺点。在此基础上,提出了一种基于支持向量机的工业机器人动力学参数辨识方法。通过实验验证了该方法的有效性和实用性。研究背景:随着工业自动化的发展,工业机器人在制造业中的应用越来越广泛。为了保证工业机器人的性能和精度,需要对工业机器人的动力学参数进行精确辨识。动力学参数辨识是了解机器人动态特性、优化控制系统的重要手段。研究意义:通过对工业机器

基于遗传算法的工业机器人动力学参数辨识.docx
基于遗传算法的工业机器人动力学参数辨识基于遗传算法的工业机器人动力学参数辨识摘要:工业机器人在现代制造业中发挥着重要作用,但是由于机器人动力学参数的复杂性和机器人本身的非线性特性,正确辨识机器人的动力学参数是一项具有挑战性的任务。遗传算法作为一种优化算法具有全局搜索能力和对问题空间的隐式建模能力,被广泛应用于机器人动力学参数辨识中。本文基于遗传算法的工业机器人动力学参数辨识方法进行了研究和总结,并通过仿真实验验证了该方法的有效性。关键词:工业机器人,动力学参数辨识,遗传算法,全局搜索1.引言工业机器人是一
2017102500053 基于特定关节运动的工业机器人负载动力学参数辨识方法.pdf
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号CN107016207A(43)申请公布日2017.08.04(21)申请号201710250005.3(22)申请日2017.04.17(71)申请人珞石(北京)科技有限公司地址100000北京市海淀区清华园内的清华大学学研综合楼八层B801-004号(72)发明人于文进刘文礼曹华庹华汤中华(74)专利代理机构北京世誉鑫诚专利代理事务所(普通合伙)11368代理人孙国栋(51)Int.Cl.G06F17/50(2006.01)权利