
作动筒万向接头伺服耐久试验装置.pdf

努力****向丝


1/10

2/10
3/10
4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

作动筒万向接头伺服耐久试验装置.pdf
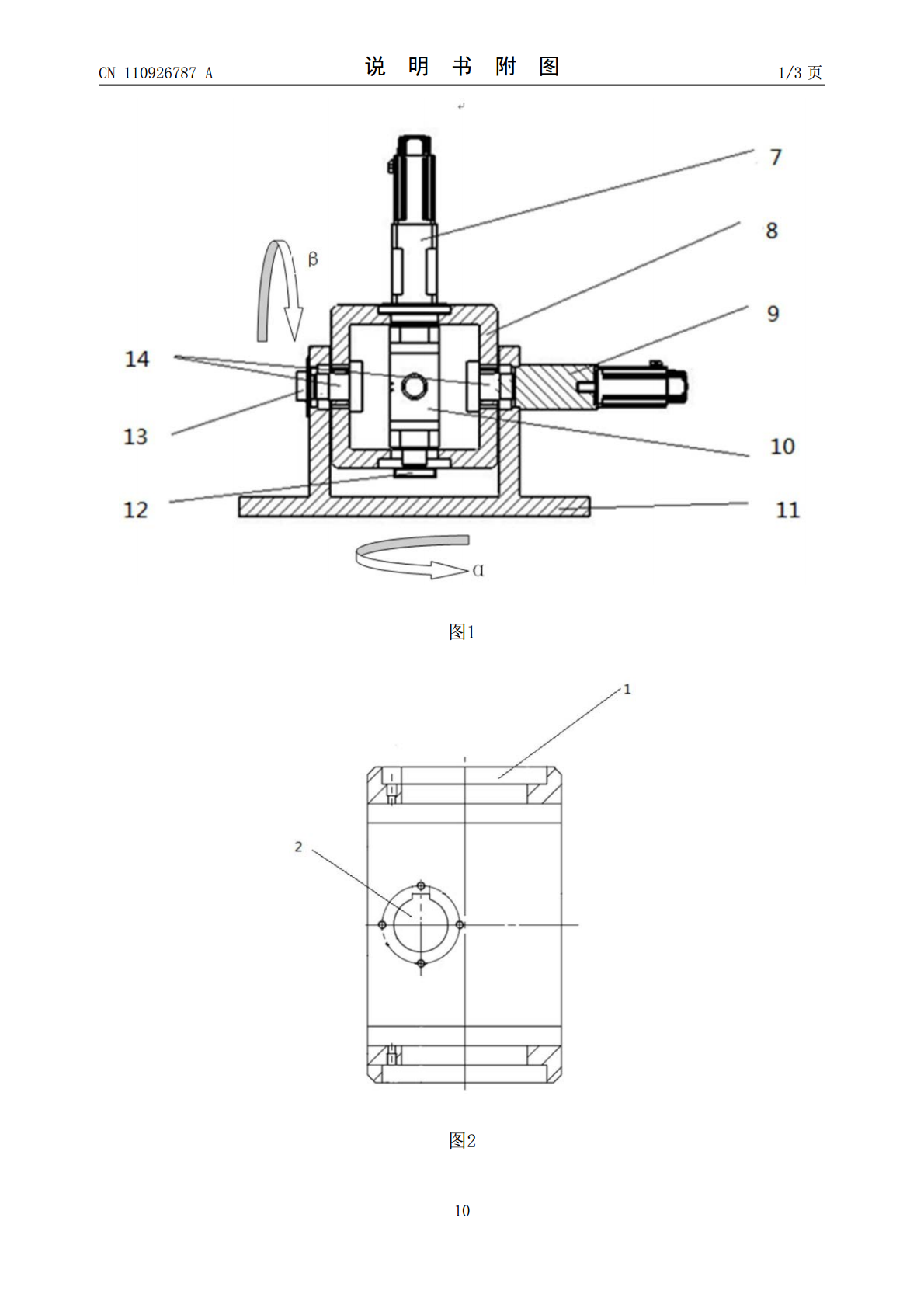
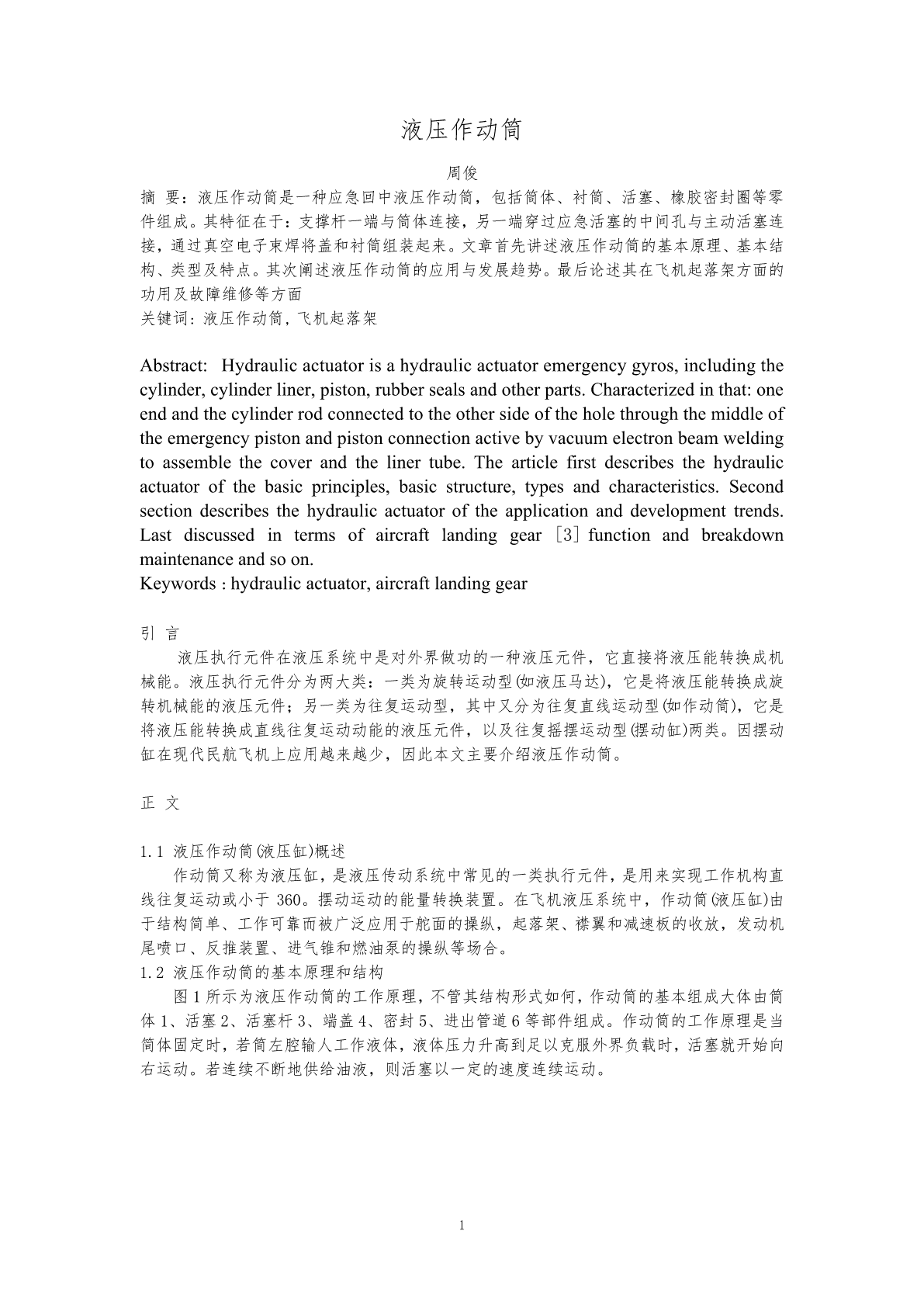
本发明公开的一种作动筒万向接头伺服耐久试验装置,旨在提供一种加载力可控,能够准确模拟作动筒工况的耐久试验装置。本发明通过下述技术方案实现:α角旋转伺服电机通过α、β角旋转夹具安装轴连接α、β角旋转夹具,与α、β角旋转伺服电机在空间上呈互为垂直的耦合结构,伺服电机按照α、β角旋转编码器给定的目标偏转角度进行转动,通过PID算法实现对伺服电机的控制万向接头α和β两个方向的偏转角度,万向接头按照作动筒试验要求进行角度偏转,跟随活塞杆位移进行变化转动角度,产生非线性轨迹角度,两个编码器根据数值分析牛顿插值进行曲线

伺服阀大小对作动筒加载速率的影响研究.docx
伺服阀大小对作动筒加载速率的影响研究伺服阀是一种调节流体压力和流量的控制装置,主要用于液压系统的控制和调节。在液压系统中,关键的液压元件之一是作动筒。作动筒是将液压功力转换为机械功力的液压执行元件,通常用于改变运动方向和增大力量。因此,作动筒的加载速率是影响液压系统性能的关键因素之一。本文将研究伺服阀大小对作动筒加载速率的影响。一、伺服阀的作用和结构伺服阀的作用是调节液压系统中的流体压力和流量,以达到控制液压执行元件(例如作动筒、液压马达和液压缸)动作的目的。伺服阀通常包括一个电磁铁、一个阀芯和一个阀座。
液压作动筒.pdf
液压作动筒周俊摘要:液压作动筒是一种应急回中液压作动筒,包括筒体、衬筒、活塞、橡胶密封圈等零件组成。其特征在于:支撑杆一端与筒体连接,另一端穿过应急活塞的中间孔与主动活塞连接,通过真空电子束焊将盖和衬筒组装起来。文章首先讲述液压作动筒的基本原理、基本结构、类型及特点。其次阐述液压作动筒的应用与发展趋势。最后论述其在飞机起落架方面的功用及故障维修等方面关键词:液压作动筒,飞机起落架Abstract:Hydraulicactuatorisahydraulicactuatoremergencygyros,inc
飞机作动筒耐久循环加载试验计算机控制系统设计.pdf
【一

液压作动筒裂纹分析.docx
液压作动筒裂纹分析液压作动筒裂纹分析摘要液压作动筒是一种常见的用于转换液压能为机械能的设备。然而,在长时间运行过程中,液压作动筒往往会出现裂纹问题。本文以液压作动筒裂纹分析为题目,对裂纹的形成原因、影响因素以及裂纹评估方法进行研究和分析,旨在提供对液压作动筒裂纹问题的全面理解。1.引言液压作动筒是液压系统中的重要组成部分,用于转换液压能为机械能,驱动各种机械装置。然而,长时间运行后,液压作动筒往往会出现裂纹问题,严重影响设备的运行性能和寿命。因此,对液压作动筒裂纹的形成原因和分析方法进行研究具有重要意义。