
AOPA地面站考试.pdf

文库****品店

1/2
2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

AOPA地面站考试.pdf
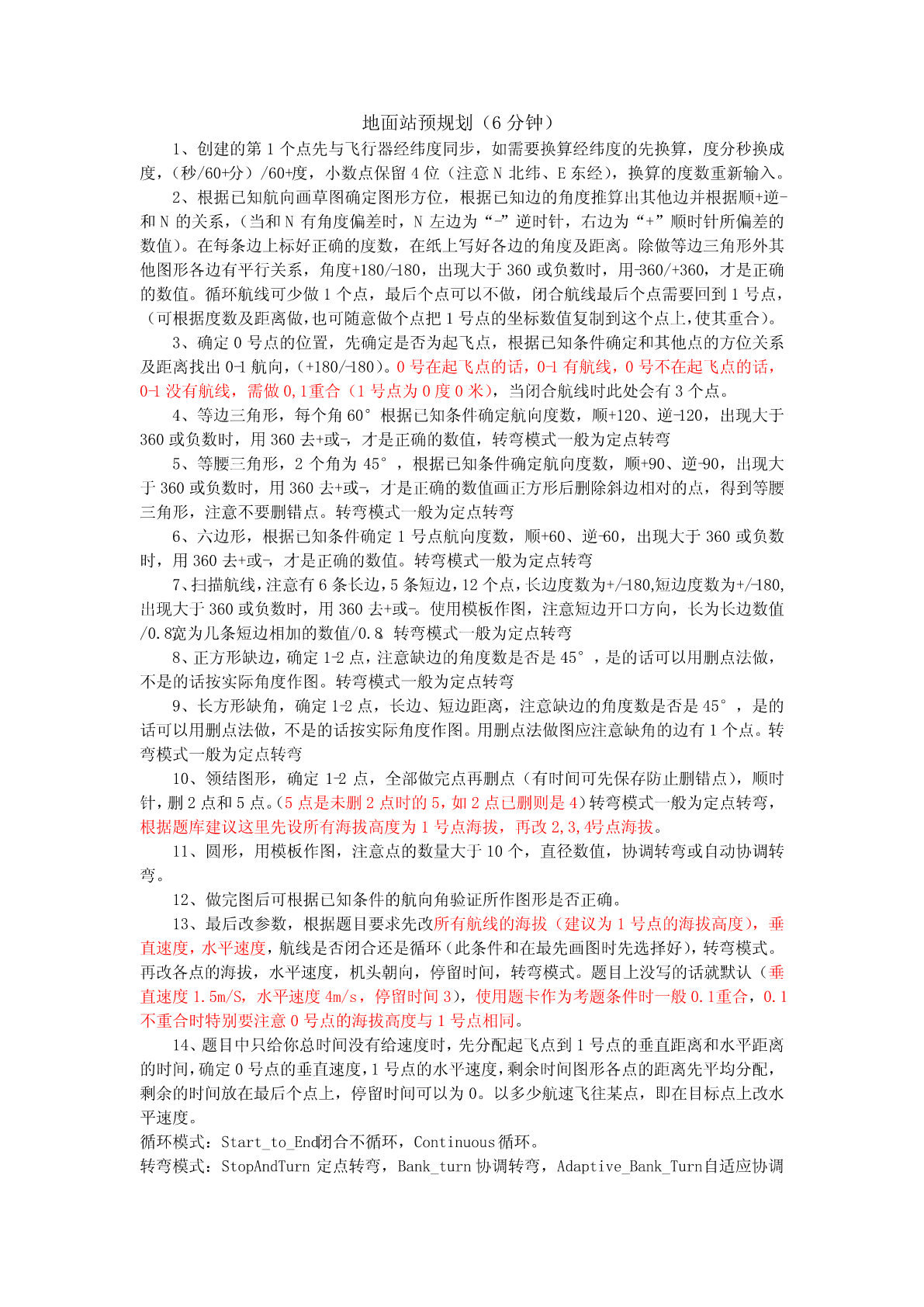
地面站预规划(6分钟)1、创建的第1个点先与飞行器经纬度同步,如需要换算经纬度的先换算,度分秒换成度,(秒/60+分)/60+度,小数点保留4位(注意N北纬、E东经),换算的度数重新输入。2、根据已知航向画草图确定图形方位,根据已知边的角度推算出其他边并根据顺+逆-和N的关系,(当和N有角度偏差时,N左边为“-”逆时针,右边为“+”顺时针所偏差的数值)。在每条边上标好正确的度数,在纸上写好各边的角度及距离。除做等边三角形外其他图形各边有平行关系,角度+180/-180,出现大于360或负数时,用-360/

无人机AOPA地面站考点梳理最全教程.pdf
无人机AOPA地面站考点梳理最全教程为了帮助广大无人机驾驶员顺利通过AOPA地面站考试,以下是一个详细的考点梳理及相关教程,希望对大家备考有所帮助。一、法律法规类考点1.无人机管理规定2.航空器驾驶员执照管理办法教程:查阅《航空器驾驶员执照管理办法》,了解无人机驾驶员执照的申请条件、考试内容等。3.民航安全管理相关法律法规二、技术基础类考点1.空气动力学基础知识教程:学习关于飞行器空气动力学基础知识,包括升力、气动力、机体结构等。2.无人机构造和组成教程:了解无人机的基本构造和组成,包括机身、动力、控制、

无人机AOPA多旋翼地面站考试考点攻略201808.docx
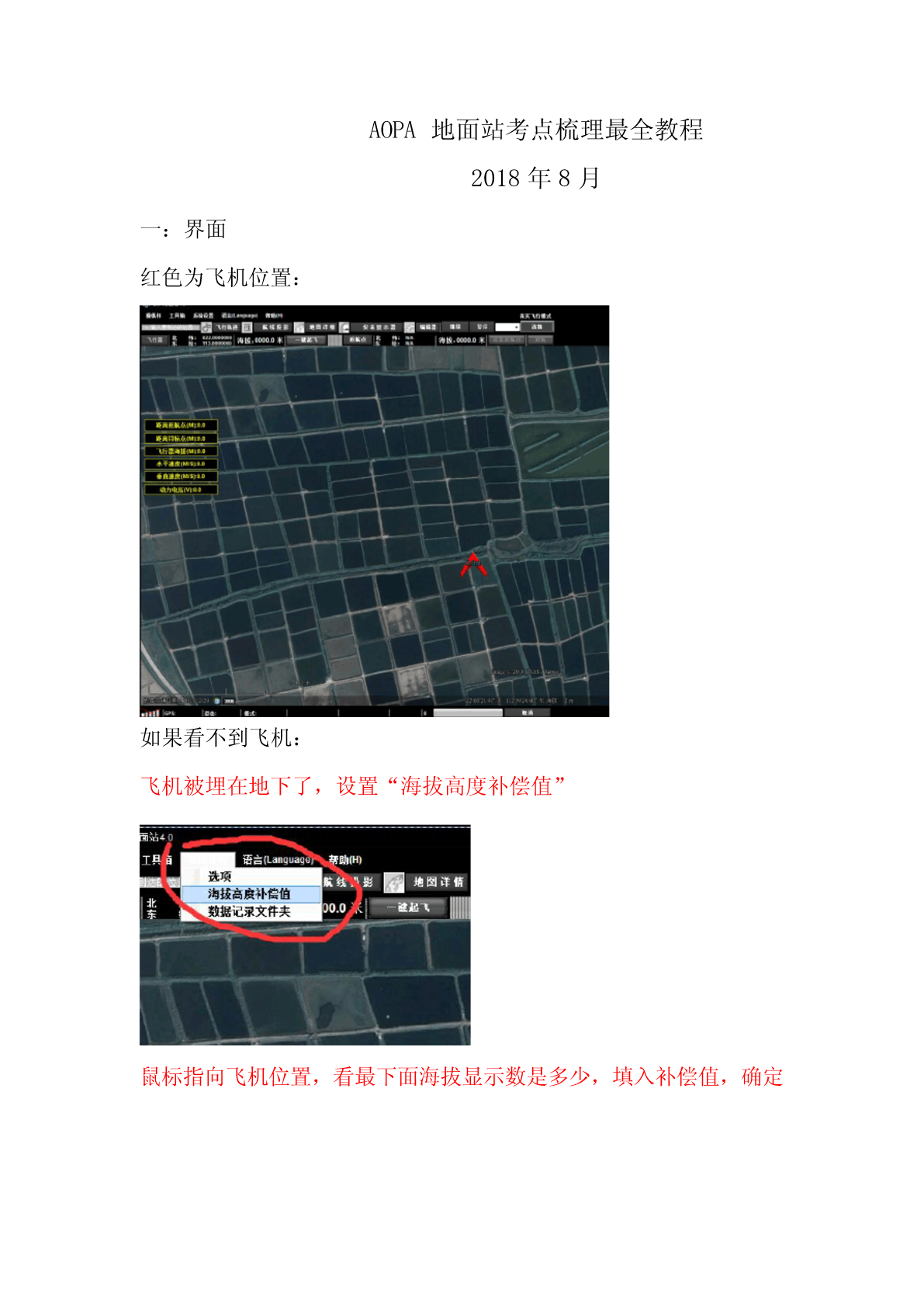
AOPA地面站考点梳理最全教程2018年8月一:界面红色为飞机位置:如果看不到飞机:飞机被埋在地下了,设置“海拔高度补偿值”鼠标指向飞机位置,看最下面海拔显示数是多少,填入补偿值,确定二、启动飞机在右上窗口,插好线后,这里会出现”comp1”,然后选择,点连接就可以了。注意查看左下角的飞机状态如果飞机点连接,没反应,怎么办?可能是设备原因,也可能是考官故意设陷阱刁难。只需重新拔插信号接收器usb再点连接即可,如果仍然不行,多拔插几次试试。二、作图基础知识:首先要区分位置,以机头正前方0度为原点画图,假设正
中国AOPA民用无人机驾驶员地面站科目题库.pdf
中国AOPA民用无人机驾驶员地面站科目题库为维护民用无人机驾驶员考试的公平性公正性与公开性,经中国AOPA无人机管理办公室研究决定,自2018年1月18日起,限定依据《民用无人机驾驶员实践考试标准》实施的民用无人机驾驶员地面站考试航线均取自《AOPA民用无人机驾驶员地面站科目题库》(以下简称:本题库)中。考试员实施实践考试中,在考试飞行前准备阶段由考试员从本题库中随机选取航线,考试员可依据现场实际条件以及无人机系统特性决定航线的方位(本题库中各考题中的航线可依据考试员要求随意旋转角度)以及航线参数中的各项
无人机AOPA多旋翼地面站考试考点攻略201808 精选.pdf
AOPA地面站考点梳理最全教程2018年8月一:界面红色为飞机位置:如果看不到飞机:飞机被埋在地下了,设置“海拔高度补偿值”鼠标指向飞机位置,看最下面海拔显示数是多少,填入补偿值,确定二、启动飞机在右上窗口,插好线后,这里会出现”comp1”,然后选择,点连接就可以了。注意查看左下角的飞机状态如果飞机点连接,没反应,怎么办?可能是设备原因,也可能是考官故意设陷阱刁难。只需重新拔插信号接收器usb再点连接即可,如果仍然不行,多拔插几次试试。二、作图基础知识:首先要区分位置,以机头正前方0度为原点画图,假设正