
开关磁阻电机控制系统的研发与应用.pdf

文库****品店

1/3
2/3
3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
开关磁阻电机控制系统的研发与应用.pdf
测控航空发动机、电动工具、离心机等),伺服与调速系统等,精确解析式。由于电机结构参数、控制参数、控制方式的功率范围从10W(转速为10000r/min)到5MW(转速为不同。相电流波形也将出现不同形状,开关器件的额定电50r/min),转速上限高达1000( ̄r/min。尤其是SRD在矿流也随之变化。随着SRM运行的范围不断扩大,针对特山机械领域已得到了较为广泛的应用,并取得了较好的经定系统开发的功率变换器的种类也越来越多,从目前的文济效益。目前国内已有一些公司专注于SRD在矿山领域中献资料来看,不同线路

开关磁阻电机控制系统研发综述报告.pptx
,CONTENTS01.02.开关磁阻电机控制系统的定义开关磁阻电机控制系统的基本组成开关磁阻电机控制系统的特点03.开关磁阻电机控制系统的起源开关磁阻电机控制系统的发展历程开关磁阻电机控制系统的现状与趋势04.开关磁阻电机的设计技术控制算法的设计与实现驱动电路的设计与实现系统集成与优化技术05.工业自动化领域的应用电动车领域的应用航空航天领域的应用其他领域的应用06.开关磁阻电机控制系统的发展前景开关磁阻电机控制系统面临的挑战未来研究方向与展望07.对开关磁阻电机控制系统的总结评价对未来发展的建议与展望

开关磁阻电机控制系统研发开题报告.docx
开关磁阻电机控制系统研发开题报告一、研究背景随着现代工业的不断发展,越来越多的机械设备开始采用电机作为动力源,在多种电机控制方案中,开关磁阻电机是近年来备受关注的一种,其具有高效、低噪音、高转矩等优点,用途广泛且优势明显。由于开关磁阻电机的控制需要精准的电力电子技术和信号处理技术支持,因此如何提高其控制精度和可靠性成为该领域研究的重点方向之一。二、研究目的本研究旨在设计一种开关磁阻电机的控制系统,该系统基于嵌入式硬件平台和控制算法,实现对开关磁阻电机的高效、精准控制,提高其可靠性和使用效率,解决该领域的核

开关磁阻电机控制系统研发综述报告.docx
开关磁阻电机控制系统研发综述报告随着电机技术的不断发展,很多新型的电机控制系统被应用于各个领域,其中开关磁阻电机控制系统是一种值得关注的技术。开关磁阻电机(SwitchedReluctanceMotor,SRM)是指将铁心(转子)上的铁芯面上开凿一个或多个磁阻槽,将定子的线圈分别通以交流电源,使转子在电磁力作用下转动的电机。本文将对开关磁阻电机控制系统做一个综述。一、开关磁阻电机的优势1.结构简单开关磁阻电机不需要恒磁场激励,因此不需要永磁体或者励磁线圈,铁芯设计简单,不仅方便制造,而且节省了成本。2.效
开关磁阻电机控制系统.pdf
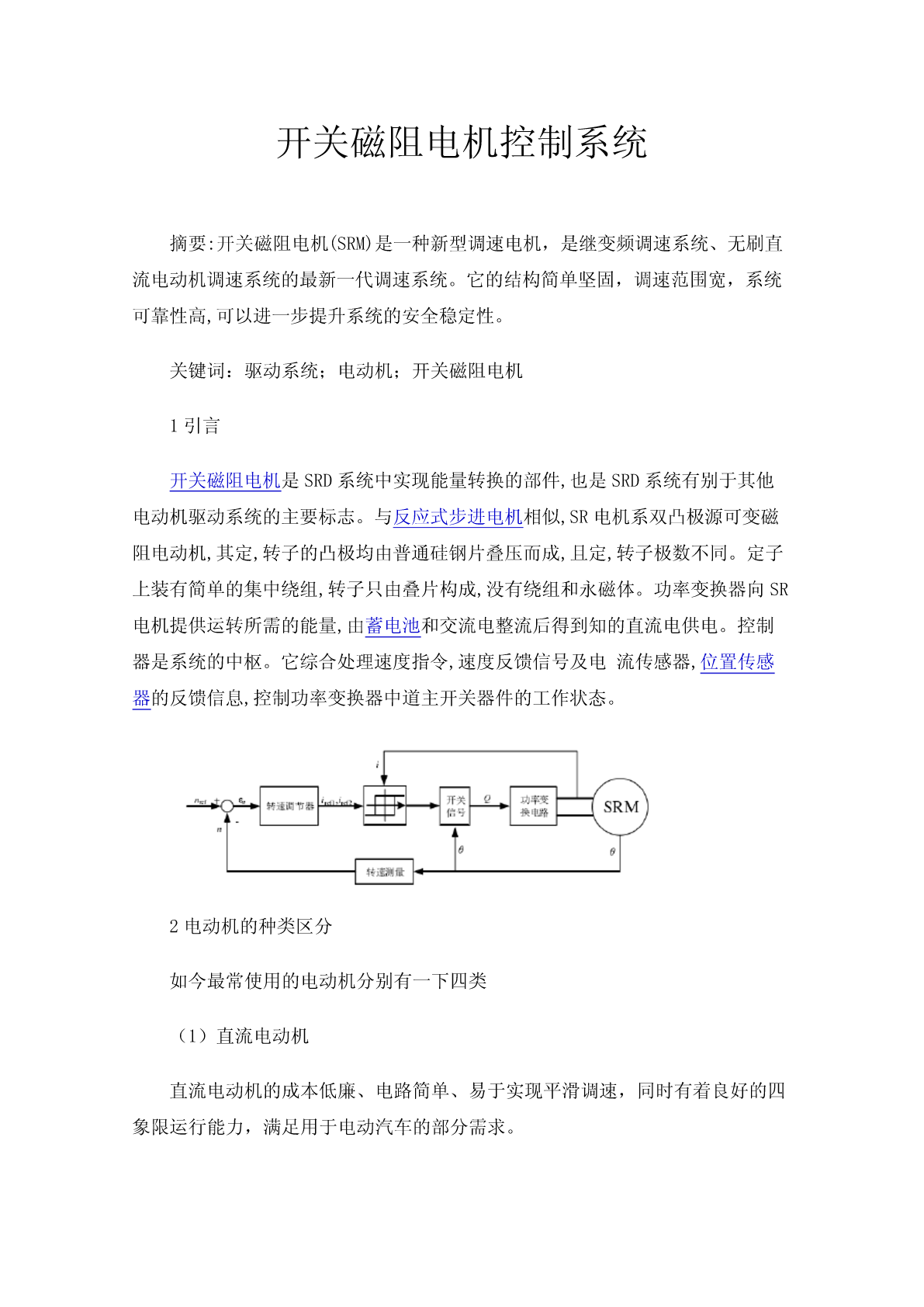
开关磁阻电机控制系统摘要:开关磁阻电机(SRM)是一种新型调速电机,是继变频调速系统、无刷直流电动机调速系统的最新一代调速系统。它的结构简单坚固,调速范围宽,系统可靠性高,可以进一步提升系统的安全稳定性。关键词:驱动系统;电动机;开关磁阻电机1引言开关磁阻电机是SRD系统中实现能量转换的部件,也是SRD系统有别于其他电动机驱动系统的主要标志。与反应式步进电机相似,SR电机系双凸极源可变磁阻电动机,其定,转子的凸极均由普通硅钢片叠压而成,且定,转子极数不同。定子上装有简单的集中绕组,转子只由叠片构成,没有绕