
一种手部手指神经康复训练方法及装置.pdf

桂香****盟主

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种手部手指神经康复训练方法及装置.pdf
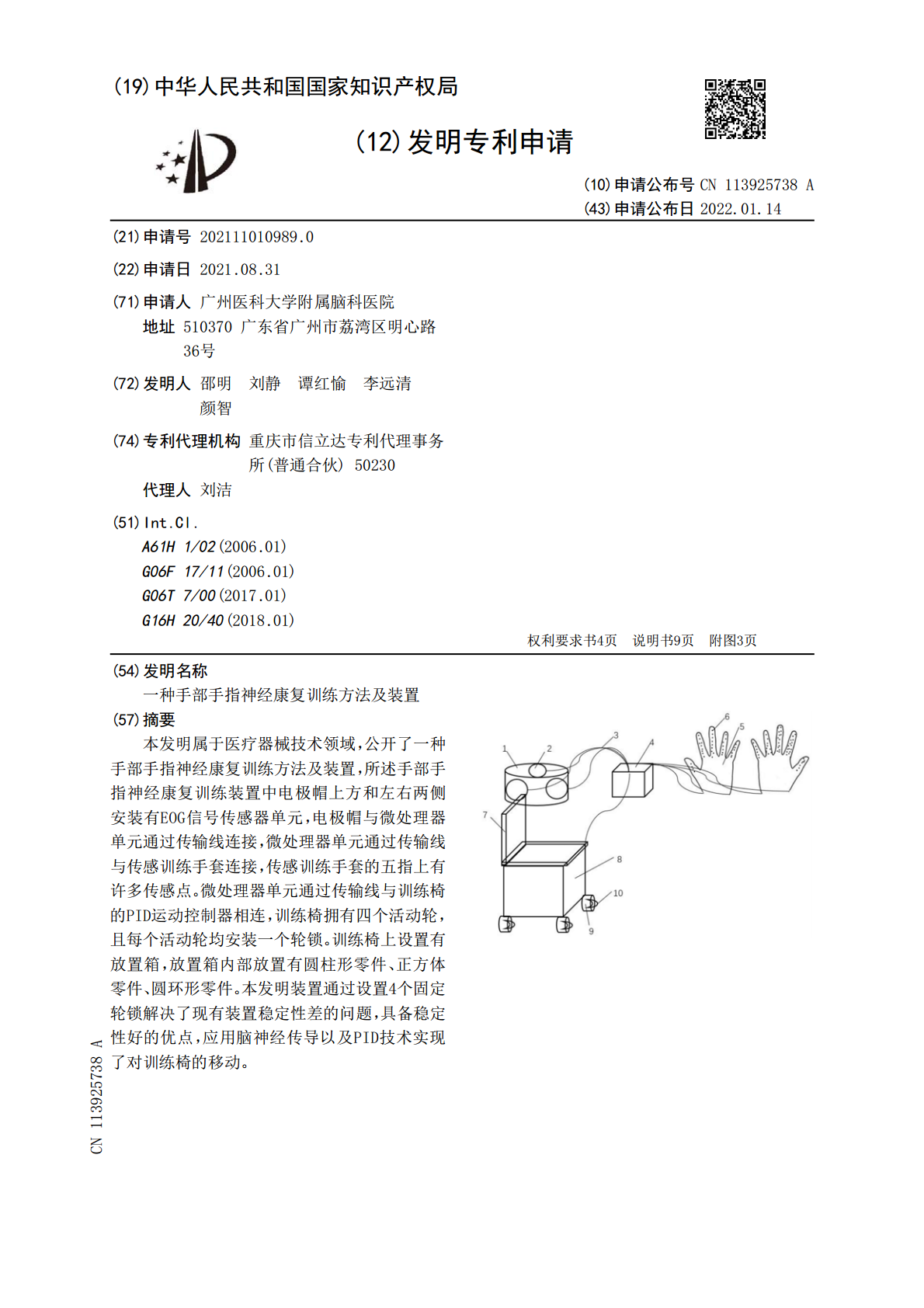
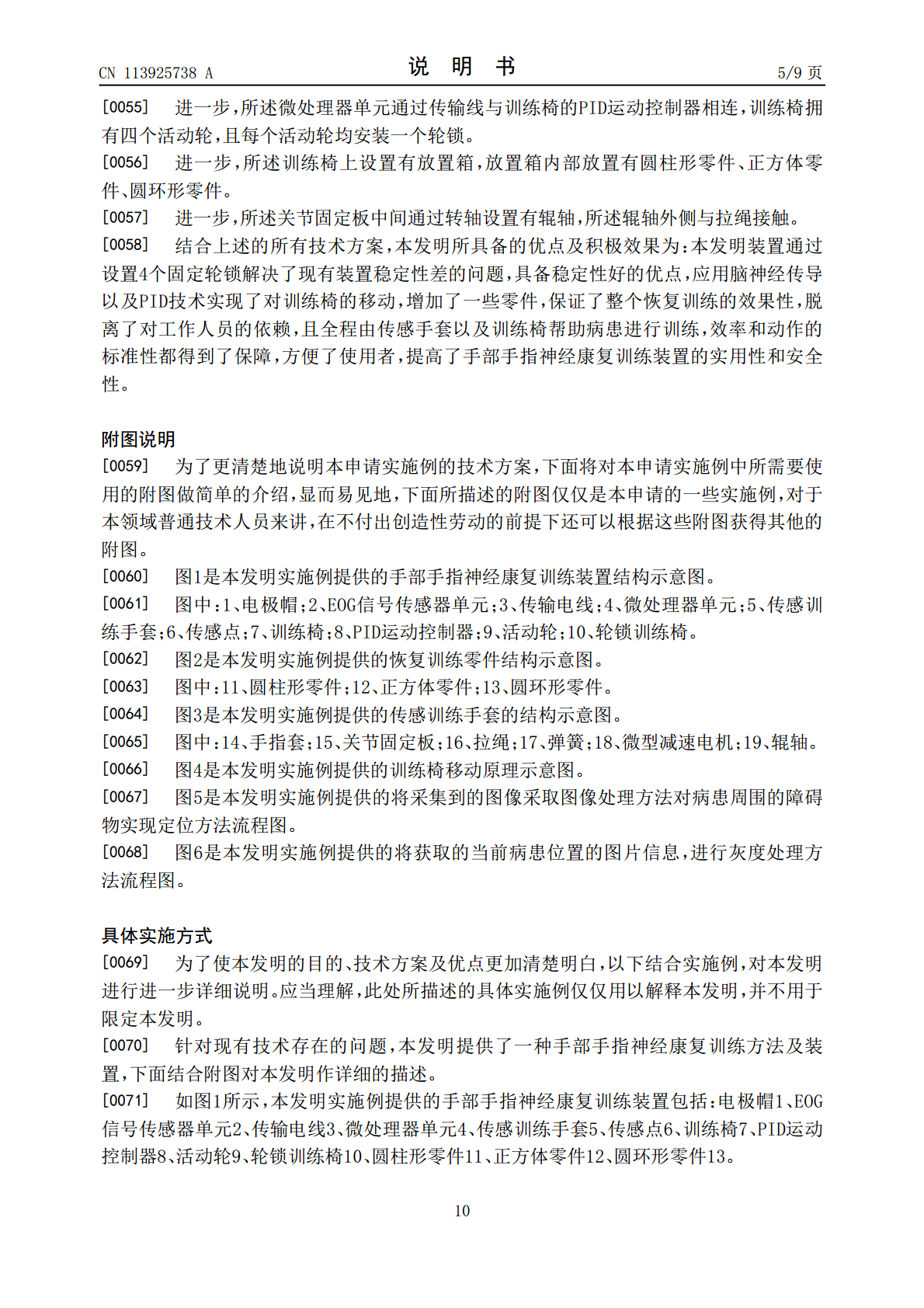
本发明属于医疗器械技术领域,公开了一种手部手指神经康复训练方法及装置,所述手部手指神经康复训练装置中电极帽上方和左右两侧安装有EOG信号传感器单元,电极帽与微处理器单元通过传输线连接,微处理器单元通过传输线与传感训练手套连接,传感训练手套的五指上有许多传感点。微处理器单元通过传输线与训练椅的PID运动控制器相连,训练椅拥有四个活动轮,且每个活动轮均安装一个轮锁。训练椅上设置有放置箱,放置箱内部放置有圆柱形零件、正方体零件、圆环形零件。本发明装置通过设置4个固定轮锁解决了现有装置稳定性差的问题,具备稳定性好
一种手指康复器装置及手指训练方法.pdf
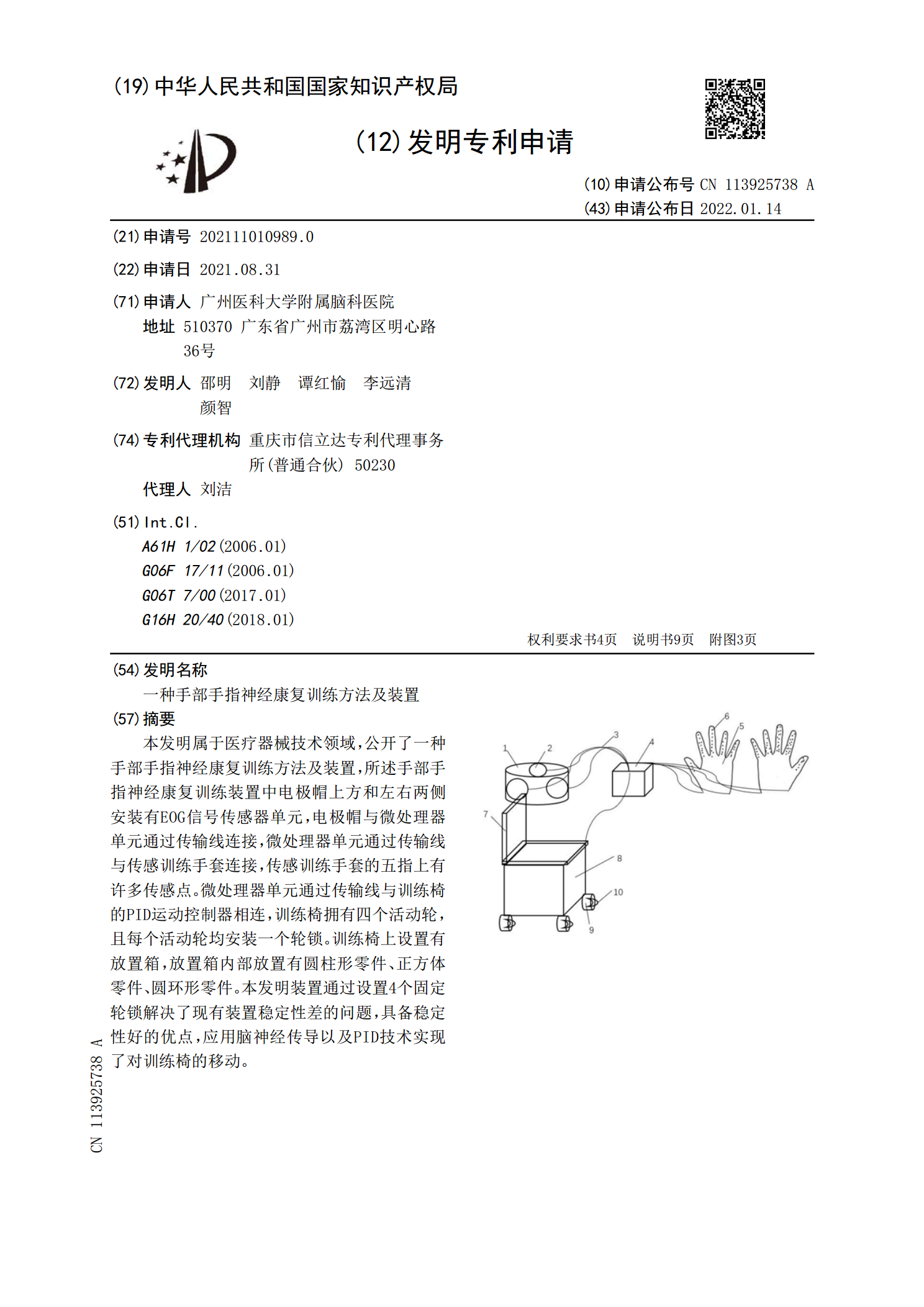
本发明公开了一种手指康复器装置及手指训练方法,所述的装置包括机械框架、智能终端模块、主控模块、电机模块、反馈模块、控制系统。所述的机械框架为电机座、滑轨、滑轮、尼龙线、大拇指套、大拇指架、食指套、食指架;所述的主控模块为单片机;所述的电机模块为步进电机;所述的反馈模块为表面肌电传感器;所述的指令模块为LeapMotion。智能终端模块通过RS485连接主控芯片模块,指令模块连接智能终端模块,主控芯片模块控制电机模块运动,反馈模块通过SPI连接主控模块。手势向前时,完成大拇指左右训练;手势向下时,完成食指
一种手部神经瘫痪医疗康复装置.pdf
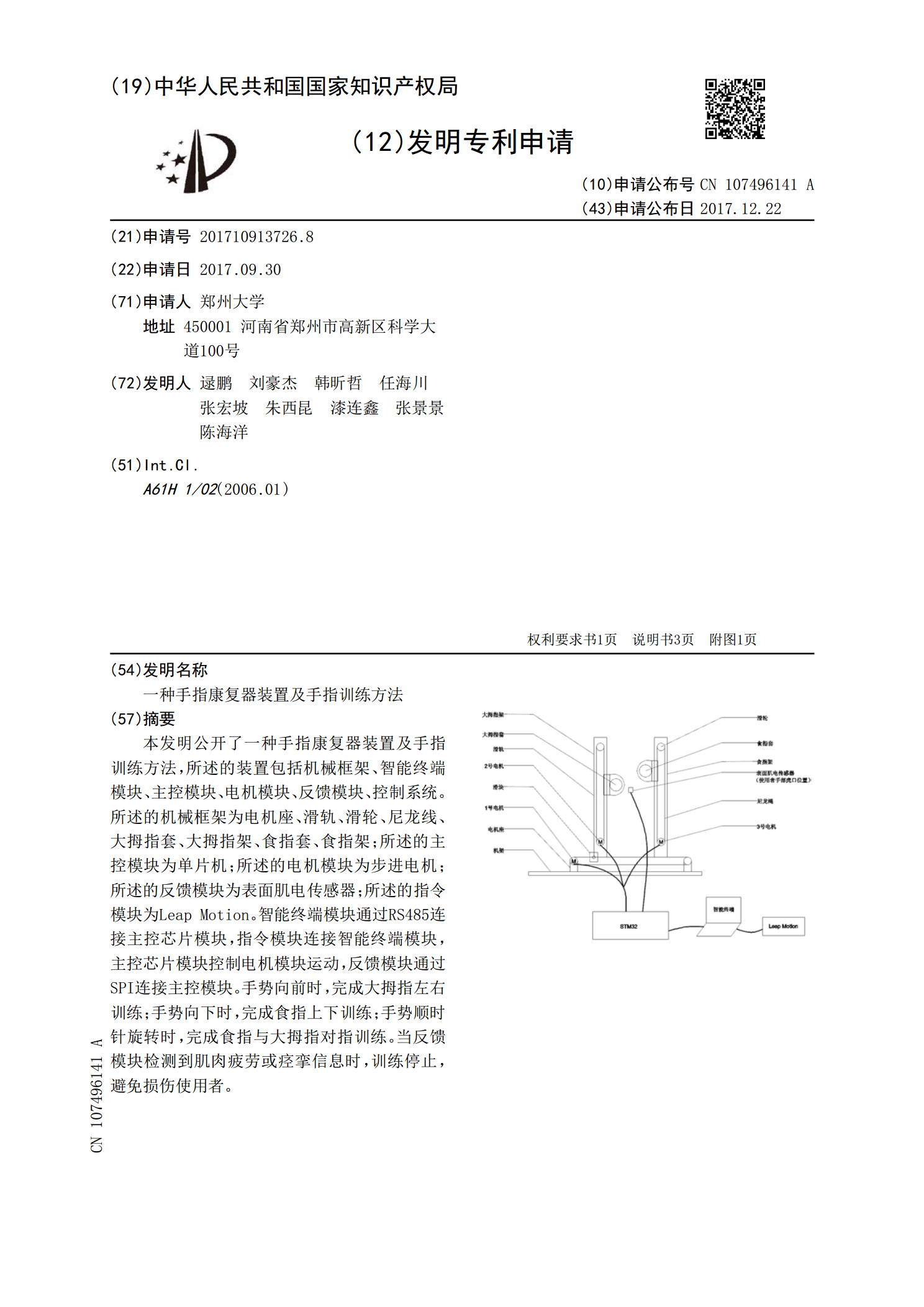
本发明公开了一种手部神经瘫痪医疗康复装置,包括指套,所述指套包括大指套和四个小指套,所述大指套的侧壁上安装有三个金属支撑杆,三个所述金属支撑杆上共同安装有弧形胶块,所述弧形胶块内开设有腔体,所述腔体内安装有压电瓷板,所述弧形胶块远离金属支撑杆的一面插设安装有三个金属调节杆,相邻的两个所述小指套之间均安装有金属弹性片。本发明通过大指套和小指套挤压的方式达到训练手部肌肉的目的,且便于携带,通过调节螺母改变弹簧的压缩量来改变初始训练强度,增加装置的训练效果和适用性,通过挤压时压迫压电瓷片产生电荷并在手部产生电流

一种手部康复装置.pdf
本实用新型公开了一种手部康复装置,包括底板和活动板,所述底板顶部两侧的正面与背面均固定连接有支撑板,所述活动板顶部的两侧均固定连接有第一L形板,并且活动板底部的两侧均固定连接有伸缩杆,两个所述伸缩杆的底端均固定连接有连接板,本实用新型涉及康复器材技术领域。该手部康复装置,通过活动板底部的两侧均固定连接有伸缩杆,将安装板安装在两个第一L形板之间,可以使手部自主用力进行锻炼,将安装板安装在两个第二L形板之间,可以实现机械带动手部进行锻炼,两种使用方式,能够扩大该装置的适用范围,使用较为方便,且活动板的高度可以
一种手部康复装置.pdf
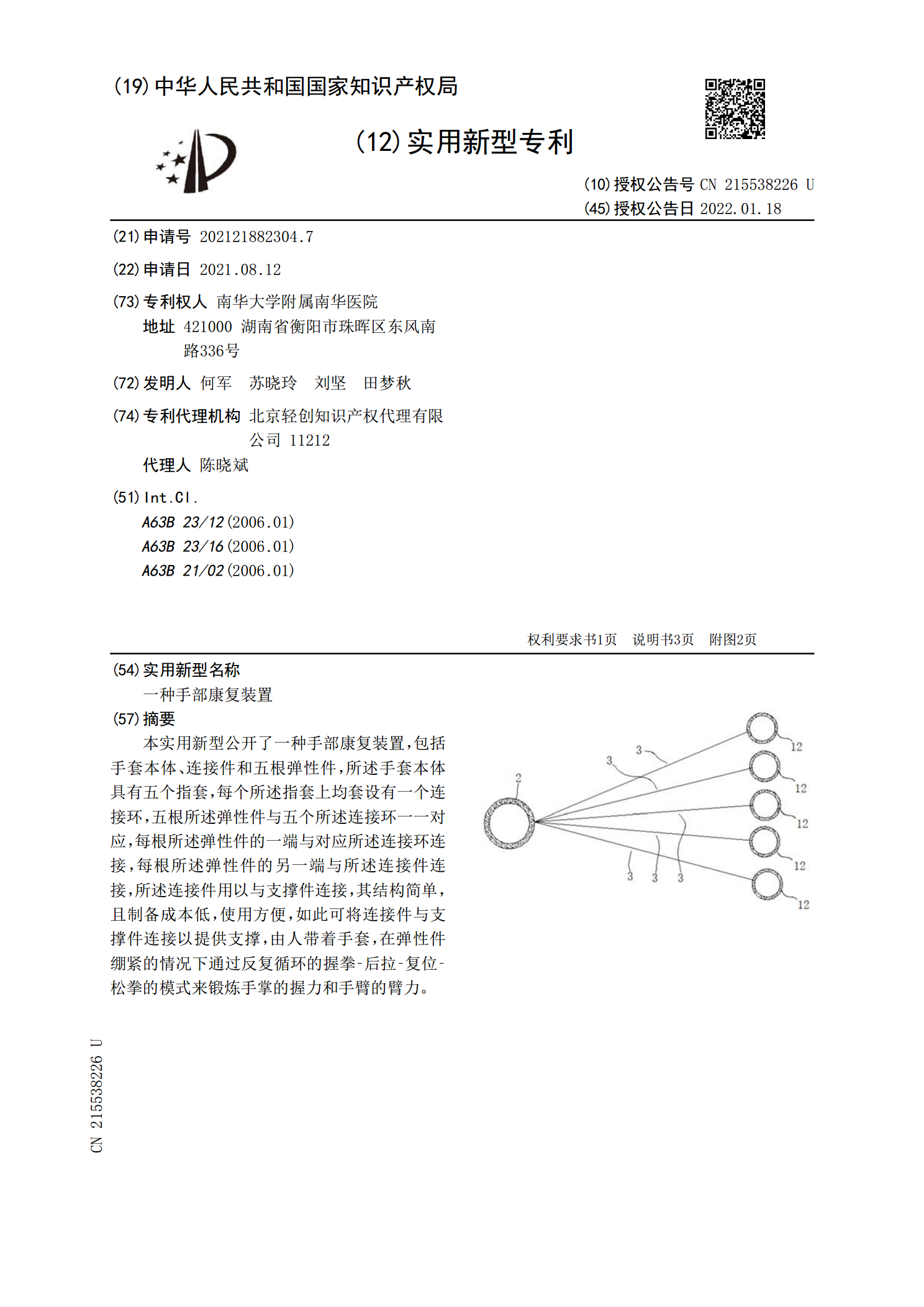
本实用新型公开了一种手部康复装置,包括手套本体、连接件和五根弹性件,所述手套本体具有五个指套,每个所述指套上均套设有一个连接环,五根所述弹性件与五个所述连接环一一对应,每根所述弹性件的一端与对应所述连接环连接,每根所述弹性件的另一端与所述连接件连接,所述连接件用以与支撑件连接,其结构简单,且制备成本低,使用方便,如此可将连接件与支撑件连接以提供支撑,由人带着手套,在弹性件绷紧的情况下通过反复循环的握拳?后拉?复位?松拳的模式来锻炼手掌的握力和手臂的臂力。