
实验2:8255七段数码管静动态显示.pdf

文库****品店

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

实验2:8255七段数码管静动态显示.pdf
实验2:8255七段数码管静动态显示北京科技大学机械专业微机原理实验报告~用到的带走哦!微机实验报告书学号:姓名:班级:同组名单:实验日期:20XX年.12.21实验题目:七段数码管的静态显示实验目标:掌握数码管显示数字的原理(功能:键盘输入一位十进制数字(0~9),用七段数码管显示。)解题思路:1.静态显示:按图10(a)连接好电路,将8255的A口PA0-PA6分别与七段数码管的断码驱动输入端a-g项链,位码驱动输入端S1接+5V,S0、dp接地。编程从键盘输入一位十进制数字,在七段数码管上显示出来。

实验七段数码管静动态显示.docx
微机实验报告书学号:姓名:班级:同组名单:实验日期:实验题目:七段数码管的静态显示实验目标:掌握数码管显示数字的原理(功能:键盘输入一位十进制数字(0~9),用七段数码管显示。)解题思路:静态显示:按图10(a)连接好电路,将8255的A口PA0-PA6分别与七段数码管的断码驱动输入端a-g项链,位码驱动输入端S1接+5V,S0、dp接地。编程从键盘输入一位十进制数字,在七段数码管上显示出来。动态显示:按图10(b)连接好电路,七段数码管段码连接不变,位码驱动输入端S1,S0接8255C口的PC1,PC0
实验四-八位七段数码管动态显示电路的设计.pdf
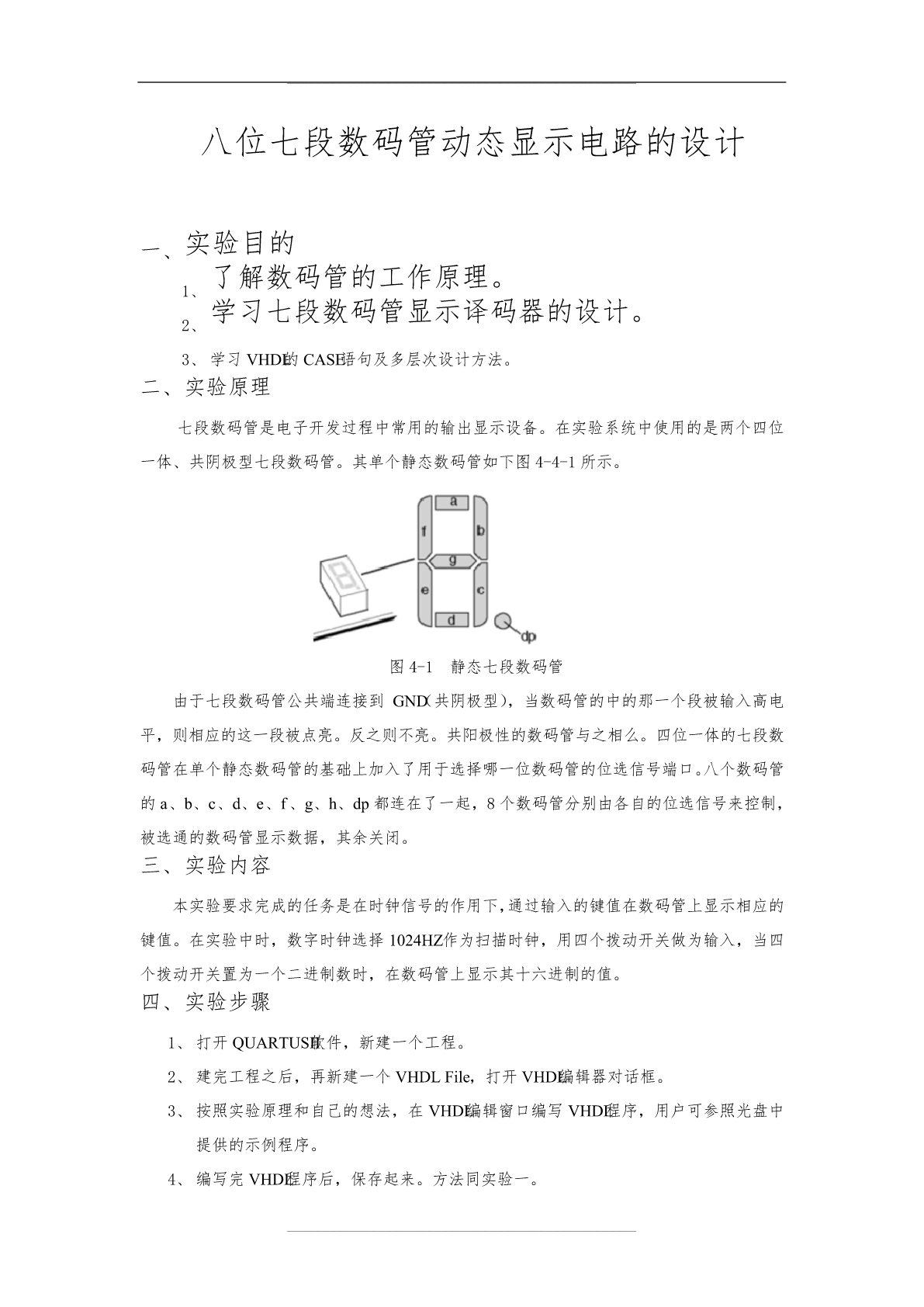
__________________________________________________八位七段数码管动态显示电路的设计一、实验目的了解数码管的工作原理。1、学习七段数码管显示译码器的设计。2、3、学习VHDL的CASE语句及多层次设计方法。二、实验原理七段数码管是电子开发过程中常用的输出显示设备。在实验系统中使用的是两个四位一体、共阴极型七段数码管。其单个静态数码管如下图4-4-1所示。图4-1静态七段数码管由于七段数码管公共端连接到GND(共阴极型),当数码管的中的那一个段被输入高电平,则

EDA实验二 八位七段数码管动态显示电路的设计.docx
实验名称八位七段数码管动态显示电路的设计实验目的了解数码管的工作原理。学习七段数码管显示译码器的设计。学习Verilog的CASE语句及多层次设计方法。实验原理七段数码管是电子开发过程中常用的输出显示设备。在实验系统中使用的是两个四位一体、共阴极型七段数码管。其单个静态数码管如下图4-1所示。图4-1静态七段数码管由于七段数码管公共端连接到GND(共阴极型),当数码管的中的那一个段被输入高电平,则相应的这一段被点亮。反之则不亮。共阳极性的数码管与之相么。四位一体的七段数码管在单个静态数码管的基础上加入了用
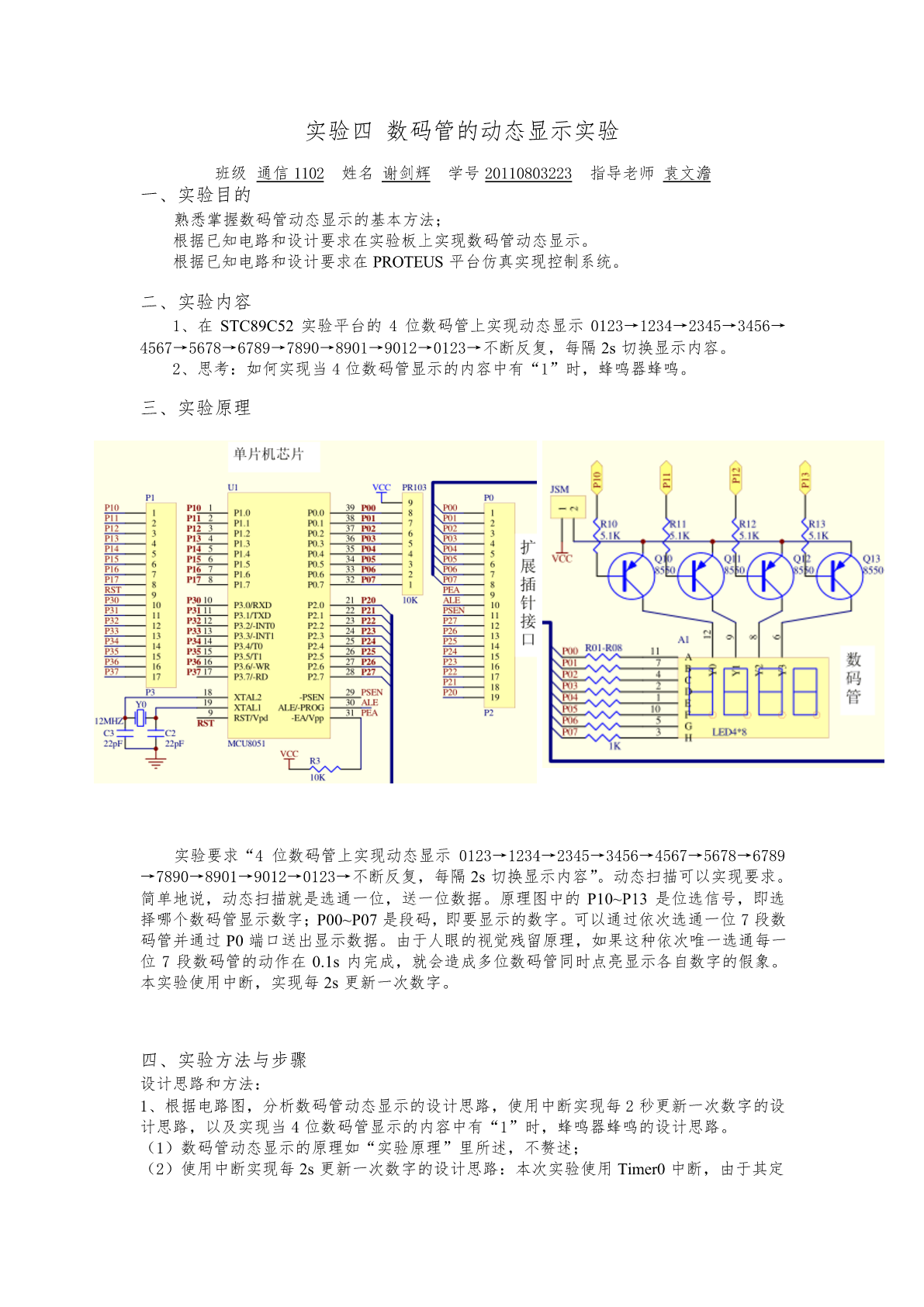
实验四 数码管的动态显示实验.pdf
实验四数码管的动态显示实验班级通信1102姓名谢剑辉学号20110803223指导老师袁文澹一、实验目的熟悉掌握数码管动态显示的基本方法;根据已知电路和设计要求在实验板上实现数码管动态显示。根据已知电路和设计要求在PROTEUS平台仿真实现控制系统。二、实验内容1、在STC89C52实验平台的4位数码管上实现动态显示0123→1234→2345→3456→4567→5678→6789→7890→8901→9012→0123→不断反复,每隔2s切换显示内容。2、思考:如何实现当4位数码管显示的内容中有“1”