
一种骨科手术用笔式手压细微骨钻.pdf

猫巷****正德


1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种骨科手术用笔式手压细微骨钻.pdf
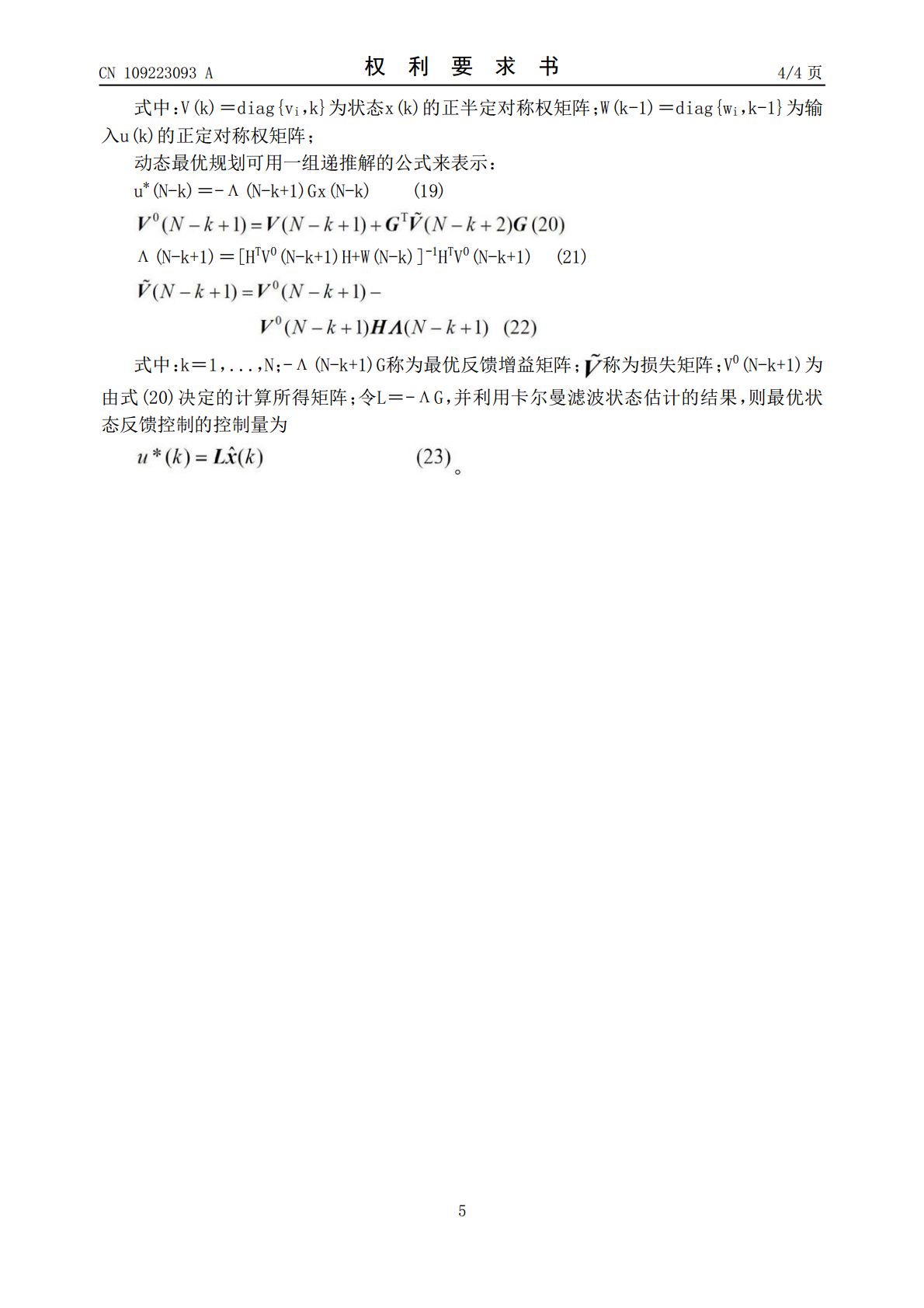
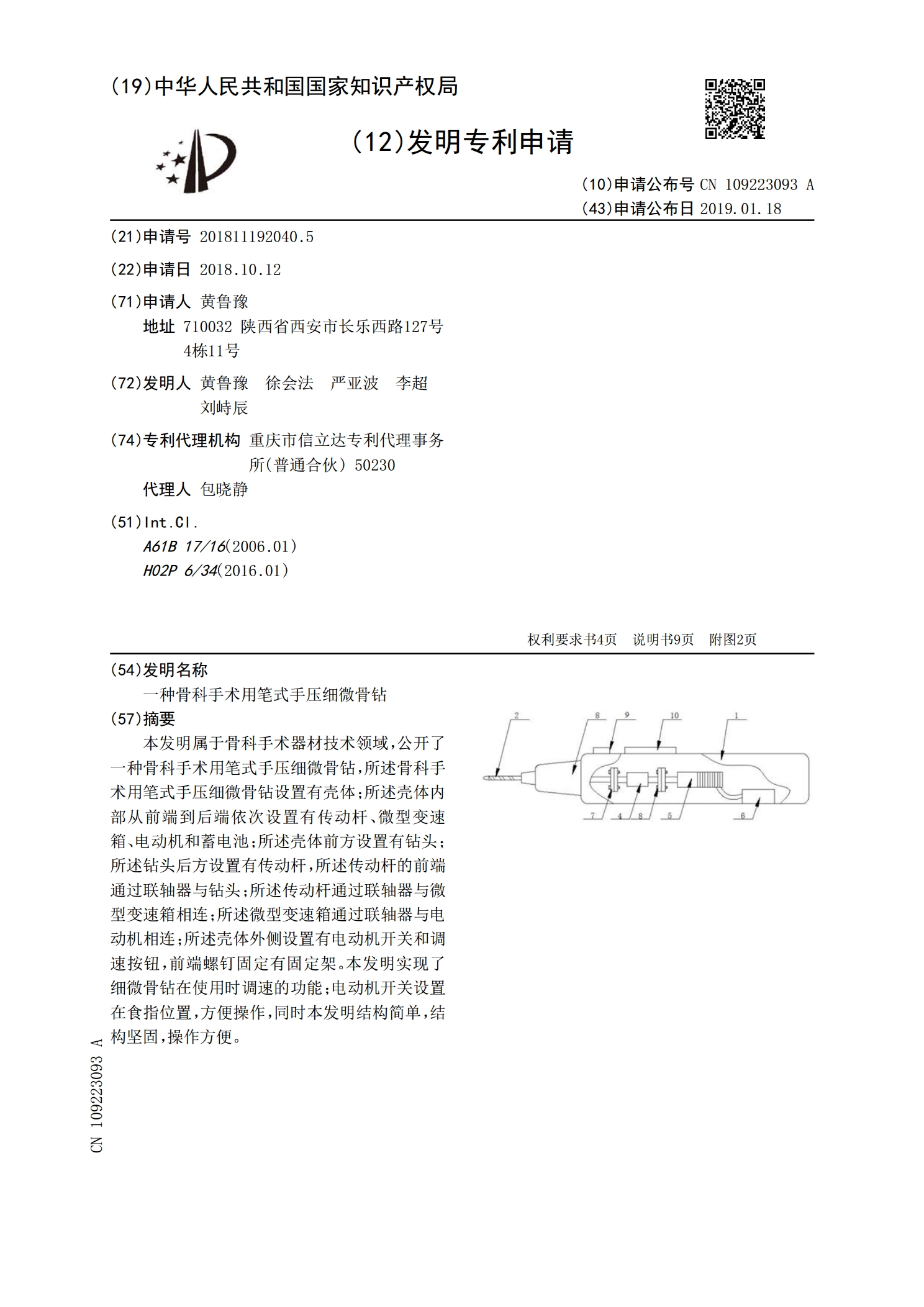
本发明属于骨科手术器材技术领域,公开了一种骨科手术用笔式手压细微骨钻,所述骨科手术用笔式手压细微骨钻设置有壳体;所述壳体内部从前端到后端依次设置有传动杆、微型变速箱、电动机和蓄电池;所述壳体前方设置有钻头;所述钻头后方设置有传动杆,所述传动杆的前端通过联轴器与钻头;所述传动杆通过联轴器与微型变速箱相连;所述微型变速箱通过联轴器与电动机相连;所述壳体外侧设置有电动机开关和调速按钮,前端螺钉固定有固定架。本发明实现了细微骨钻在使用时调速的功能;电动机开关设置在食指位置,方便操作,同时本发明结构简单,结构坚固,
一种骨科用骨钉埋头钻.pdf
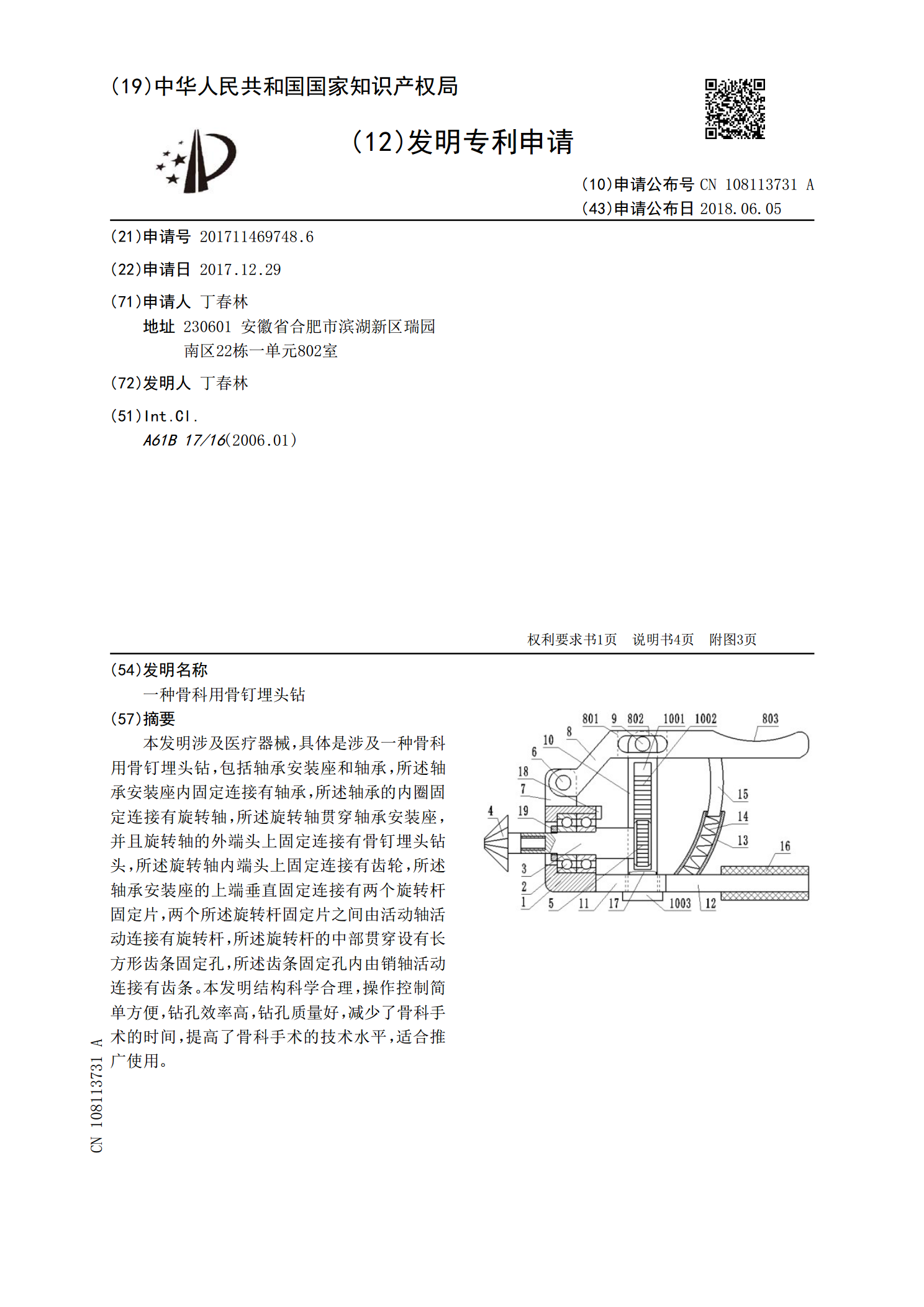
本发明涉及医疗器械,具体是涉及一种骨科用骨钉埋头钻,包括轴承安装座和轴承,所述轴承安装座内固定连接有轴承,所述轴承的内圈固定连接有旋转轴,所述旋转轴贯穿轴承安装座,并且旋转轴的外端头上固定连接有骨钉埋头钻头,所述旋转轴内端头上固定连接有齿轮,所述轴承安装座的上端垂直固定连接有两个旋转杆固定片,两个所述旋转杆固定片之间由活动轴活动连接有旋转杆,所述旋转杆的中部贯穿设有长方形齿条固定孔,所述齿条固定孔内由销轴活动连接有齿条。本发明结构科学合理,操作控制简单方便,钻孔效率高,钻孔质量好,减少了骨科手术的时间,提
一种骨科钻骨装置.pdf
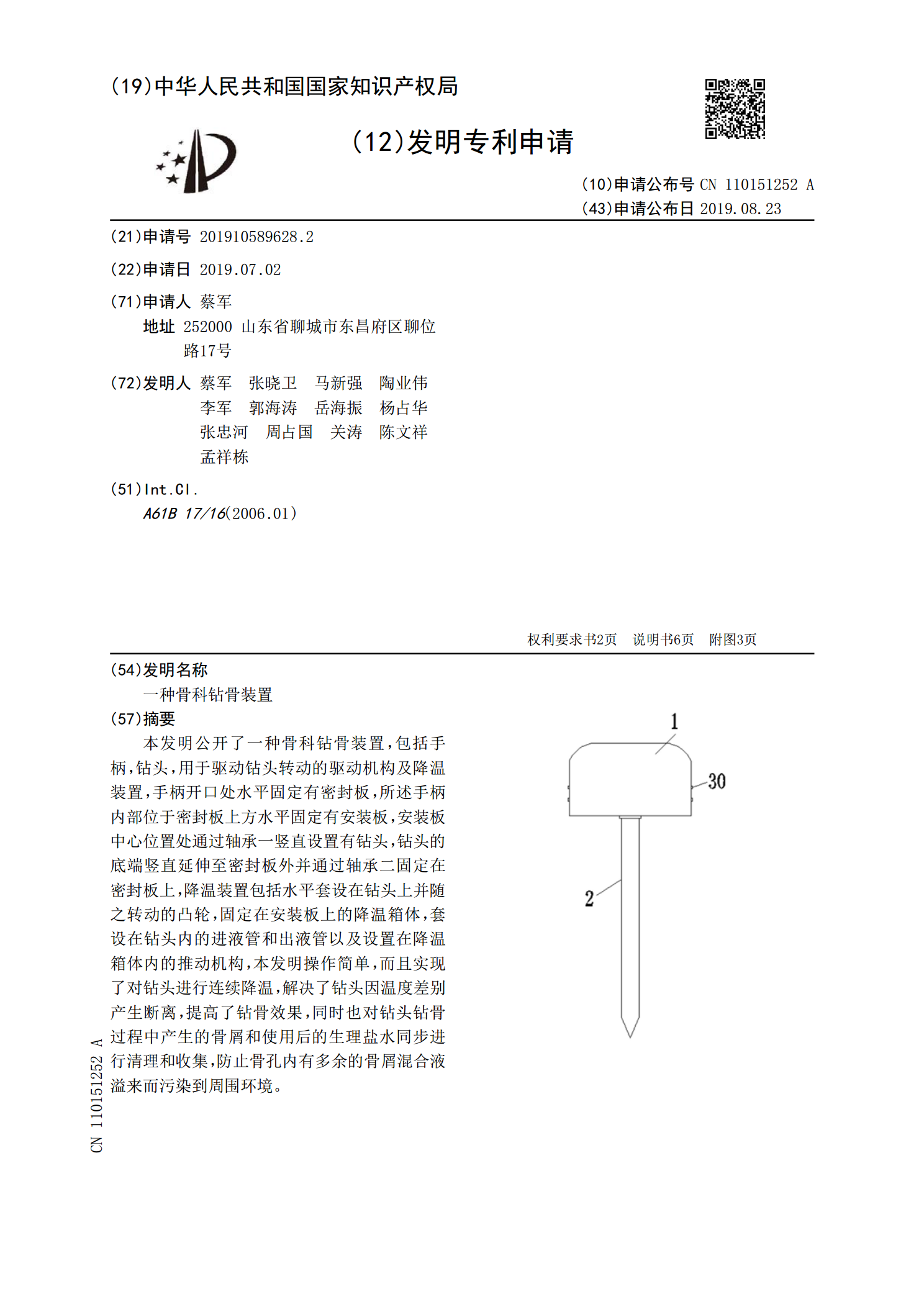
本发明公开了一种骨科钻骨装置,包括手柄,钻头,用于驱动钻头转动的驱动机构及降温装置,手柄开口处水平固定有密封板,所述手柄内部位于密封板上方水平固定有安装板,安装板中心位置处通过轴承一竖直设置有钻头,钻头的底端竖直延伸至密封板外并通过轴承二固定在密封板上,降温装置包括水平套设在钻头上并随之转动的凸轮,固定在安装板上的降温箱体,套设在钻头内的进液管和出液管以及设置在降温箱体内的推动机构,本发明操作简单,而且实现了对钻头进行连续降温,解决了钻头因温度差别产生断离,提高了钻骨效果,同时也对钻头钻骨过程中产生的骨屑
一种骨科手术用钻孔植骨装置.pdf
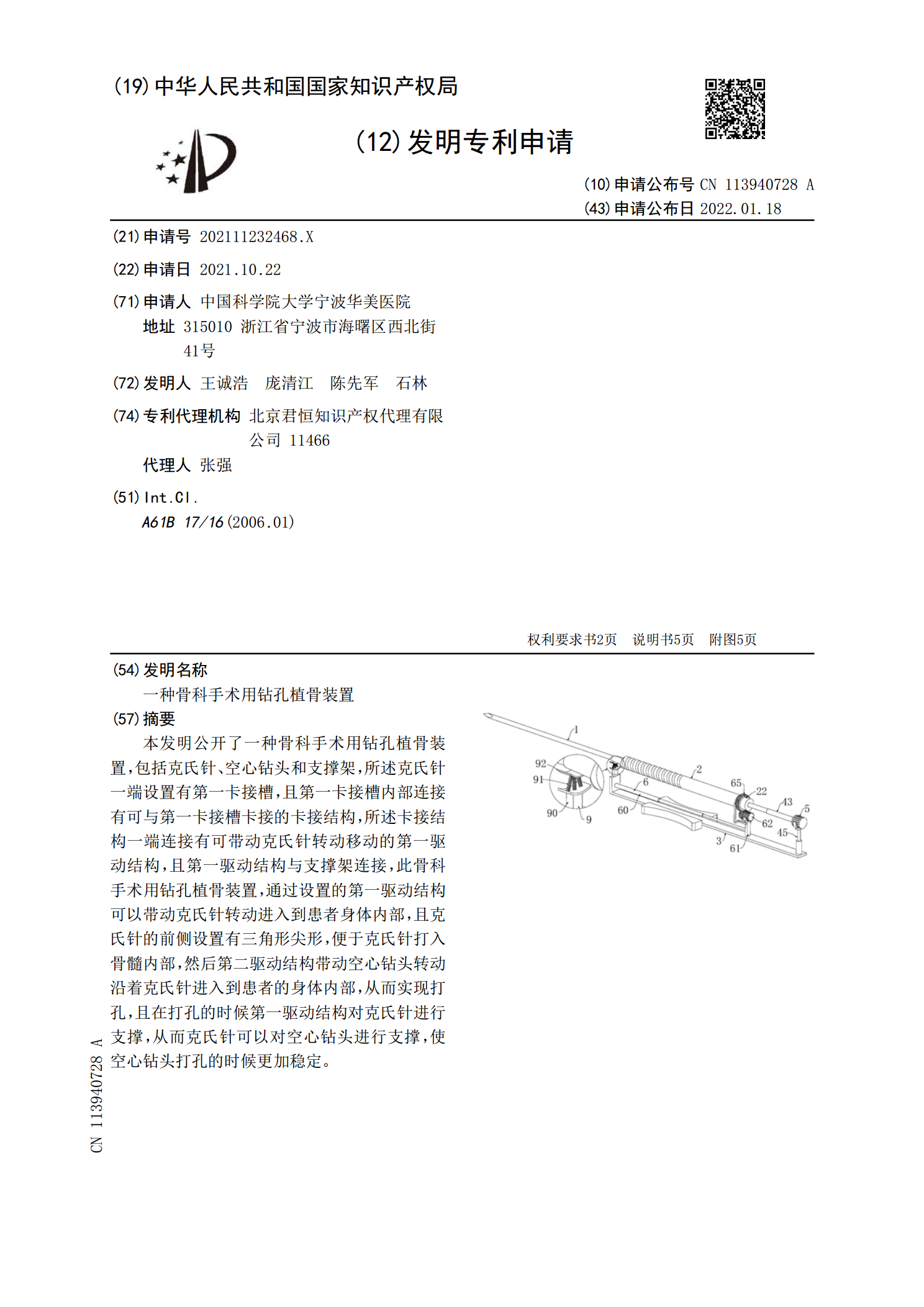
本发明公开了一种骨科手术用钻孔植骨装置,包括克氏针、空心钻头和支撑架,所述克氏针一端设置有第一卡接槽,且第一卡接槽内部连接有可与第一卡接槽卡接的卡接结构,所述卡接结构一端连接有可带动克氏针转动移动的第一驱动结构,且第一驱动结构与支撑架连接,此骨科手术用钻孔植骨装置,通过设置的第一驱动结构可以带动克氏针转动进入到患者身体内部,且克氏针的前侧设置有三角形尖形,便于克氏针打入骨髓内部,然后第二驱动结构带动空心钻头转动沿着克氏针进入到患者的身体内部,从而实现打孔,且在打孔的时候第一驱动结构对克氏针进行支撑,从而克

一种骨科手术用分离碎骨机.pdf
本发明公开了一种骨科手术用分离碎骨机,包括无菌箱体,所述无菌箱体的顶端中心位置焊接有进料筒,所述无菌箱体的正面左侧安装有电机,所述电机的输出端外壁套接有第一破碎轮,所述第一破碎轮的右侧啮合连接有第二破碎轮,所述无菌箱体的内部底端焊接有筛选装置,所述无菌箱体的下表面中心位置开设有出料口,所述无菌箱体的底端左右两侧均焊接有支撑杆,所述支撑杆的底端焊接有底板,所述支撑杆的外壁焊接有套环,所述套环的内侧焊接有固定杆,所述固定杆的底端焊接有放置座。本发明可实现对破碎后的骨块筛选速率较快,提高了医护人员的工作效率,同