
一种基于软体机器人的手部运动康复训练及评测系统.pdf

是你****平呀


1/9

2/9
3/9

4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于软体机器人的手部运动康复训练及评测系统.pdf
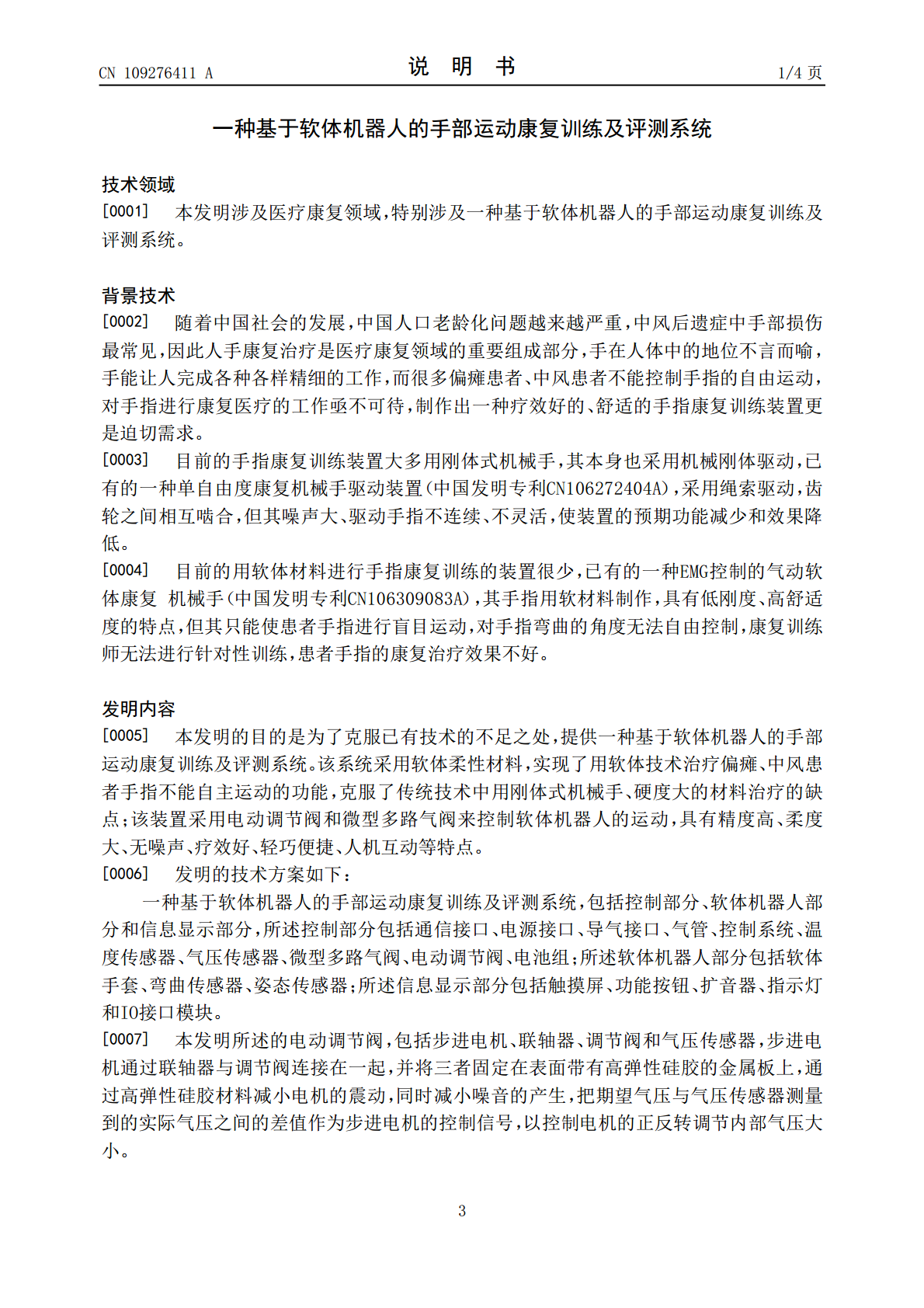
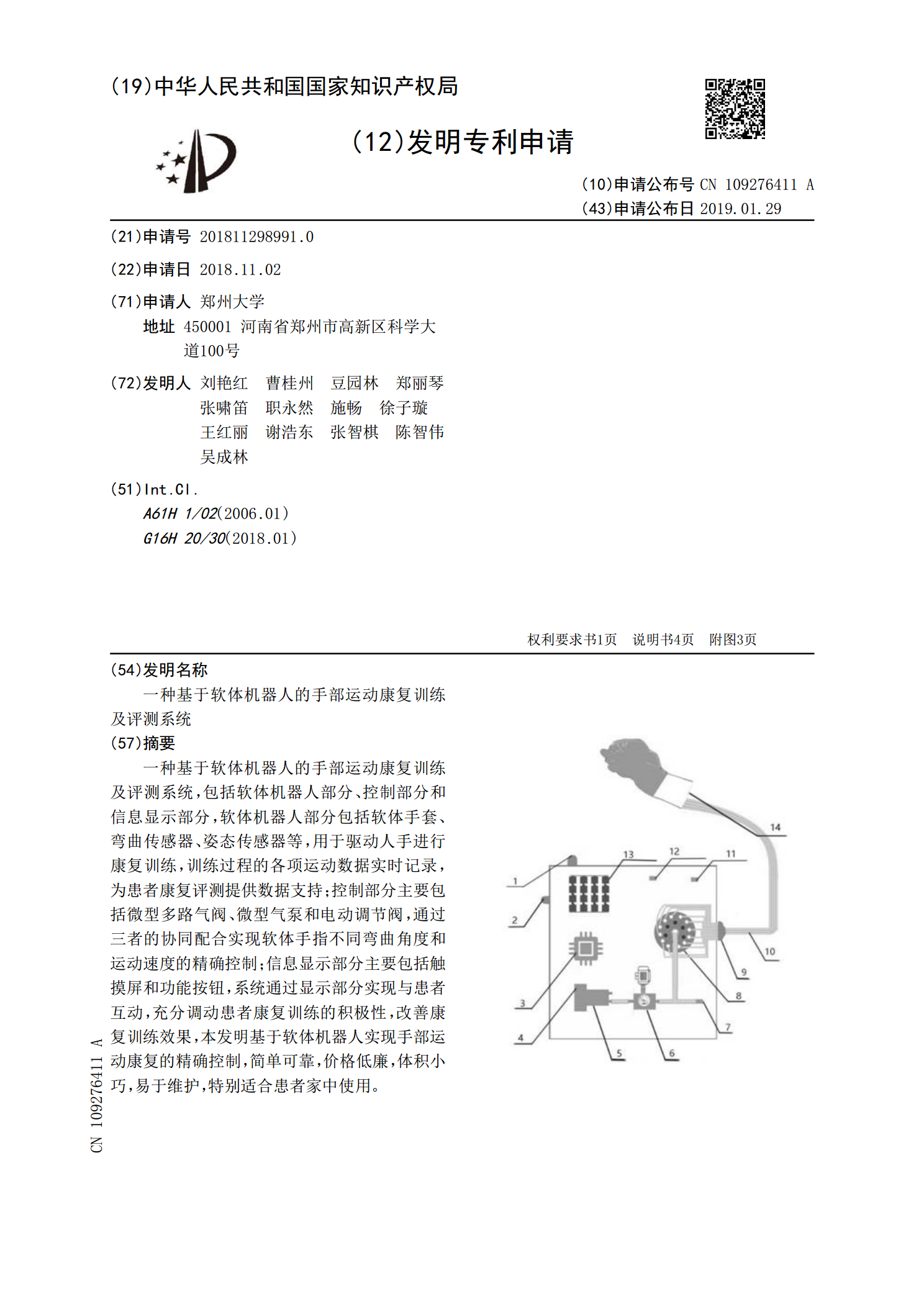
一种基于软体机器人的手部运动康复训练及评测系统,包括软体机器人部分、控制部分和信息显示部分,软体机器人部分包括软体手套、弯曲传感器、姿态传感器等,用于驱动人手进行康复训练,训练过程的各项运动数据实时记录,为患者康复评测提供数据支持;控制部分主要包括微型多路气阀、微型气泵和电动调节阀,通过三者的协同配合实现软体手指不同弯曲角度和运动速度的精确控制;信息显示部分主要包括触摸屏和功能按钮,系统通过显示部分实现与患者互动,充分调动患者康复训练的积极性,改善康复训练效果,本发明基于软体机器人实现手部运动康复的精确控

基于ROS的手部运动功能评测及康复训练系统设计的开题报告.docx
基于ROS的手部运动功能评测及康复训练系统设计的开题报告一、选题背景随着现代医疗技术的快速发展和人口老龄化问题的加深,手部损伤和疾病的发生率逐年增加。手部功能障碍极大地限制了人们的生活质量,对康复训练的需求日益迫切。针对手部功能障碍的康复训练,传统的方法主要依靠径向手臂运动和手指抓握行动,其存在许多缺陷,如受运动范围和速度限制,需要进行大量的机械训练,容易产生单调性导致康复效果缓慢等等。随着机器人技术的发展,机器人协助康复的方法被广泛应用于康复训练领域。机器人技术可以提供更为丰富和高聚合度的康复训练方案,

一种智能手部运动功能评测及康复训练轮椅.pdf
本发明公开了一种智能手部运动功能评测及康复训练轮椅,包括康复轮椅、数据采集模块、数据处理模块和人机交互模块,通过固定于康复轮椅上的嵌入式系统对采集到的数据进行滤波、补偿、计算与分析,能够准确、客观、方便地评测手部运动功能或进行康复训练,克服了传统评测及康复训练在时间、空间上的局限性;参照国际手外科学会推出的《手部功能损失评定》标准,人机交互模块依次显示指令,引导患者自主完成相应的动作;数据处理模块分析手部动作完成情况,得出评测结果及康复训练效果,并将评测结果、康复训练效果及检测数据实时显示和保存,方便患者

基于Leap Motion的手部康复训练系统设计.pptx
基于LeapMotion的手部康复训练系统设计目录添加目录项标题系统概述LeapMotion简介手部康复训练系统设计目标系统功能模块介绍系统硬件设计LeapMotion控制器介绍硬件连接方式传感器数据采集系统软件设计软件架构设计手部动作识别算法康复训练游戏设计系统应用与测试康复训练效果评估系统性能测试用户反馈与改进系统优势与局限性系统优势分析局限性分析未来改进方向结论与展望结论总结未来展望感谢观看
一种多维度手部康复训练机器人.pdf
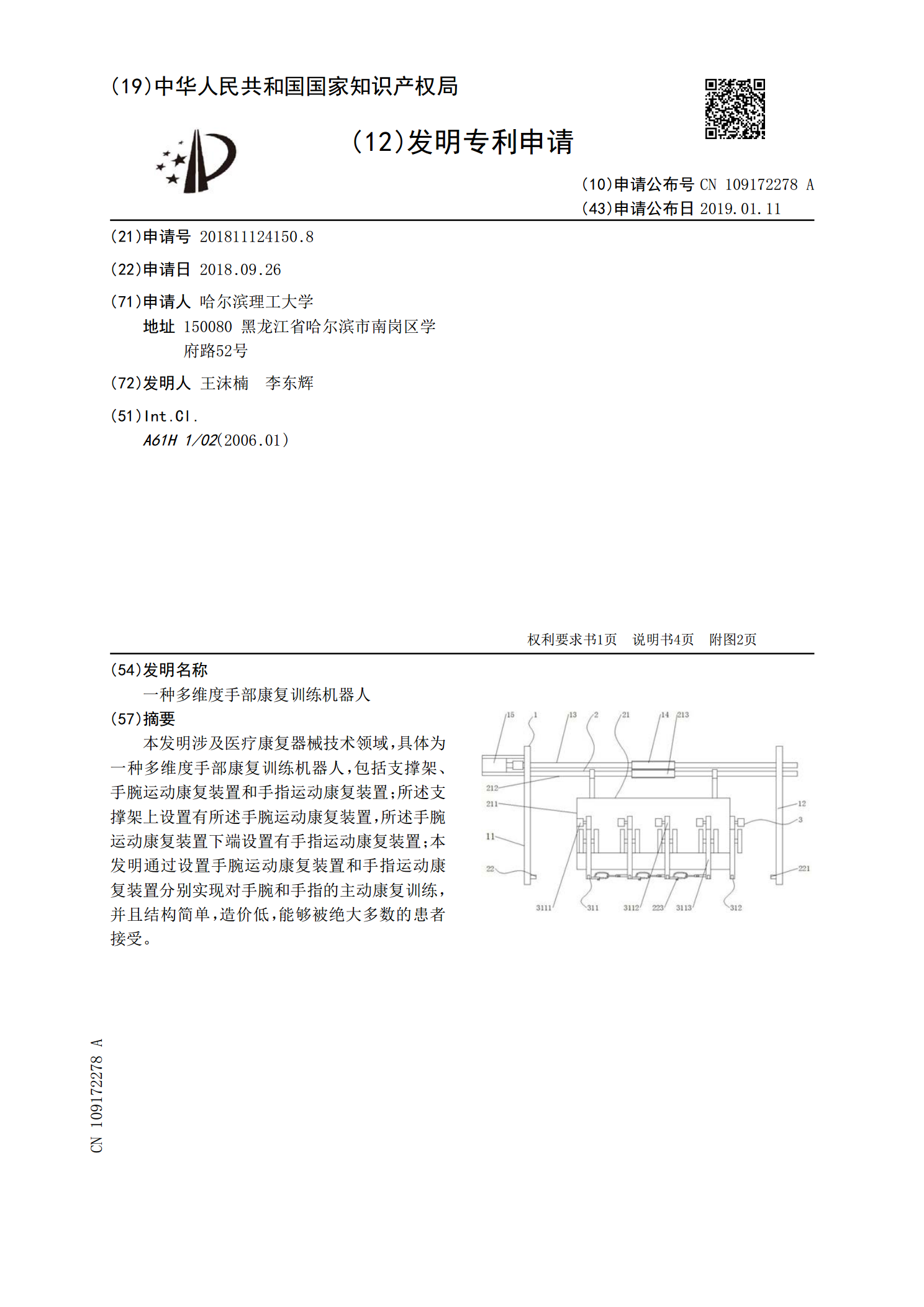
本发明涉及医疗康复器械技术领域,具体为一种多维度手部康复训练机器人,包括支撑架、手腕运动康复装置和手指运动康复装置;所述支撑架上设置有所述手腕运动康复装置,所述手腕运动康复装置下端设置有手指运动康复装置;本发明通过设置手腕运动康复装置和手指运动康复装置分别实现对手腕和手指的主动康复训练,并且结构简单,造价低,能够被绝大多数的患者接受。