
近景摄影测量复习.pdf

文库****品店

1/6
2/6
3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
近景摄影测量复习.pdf
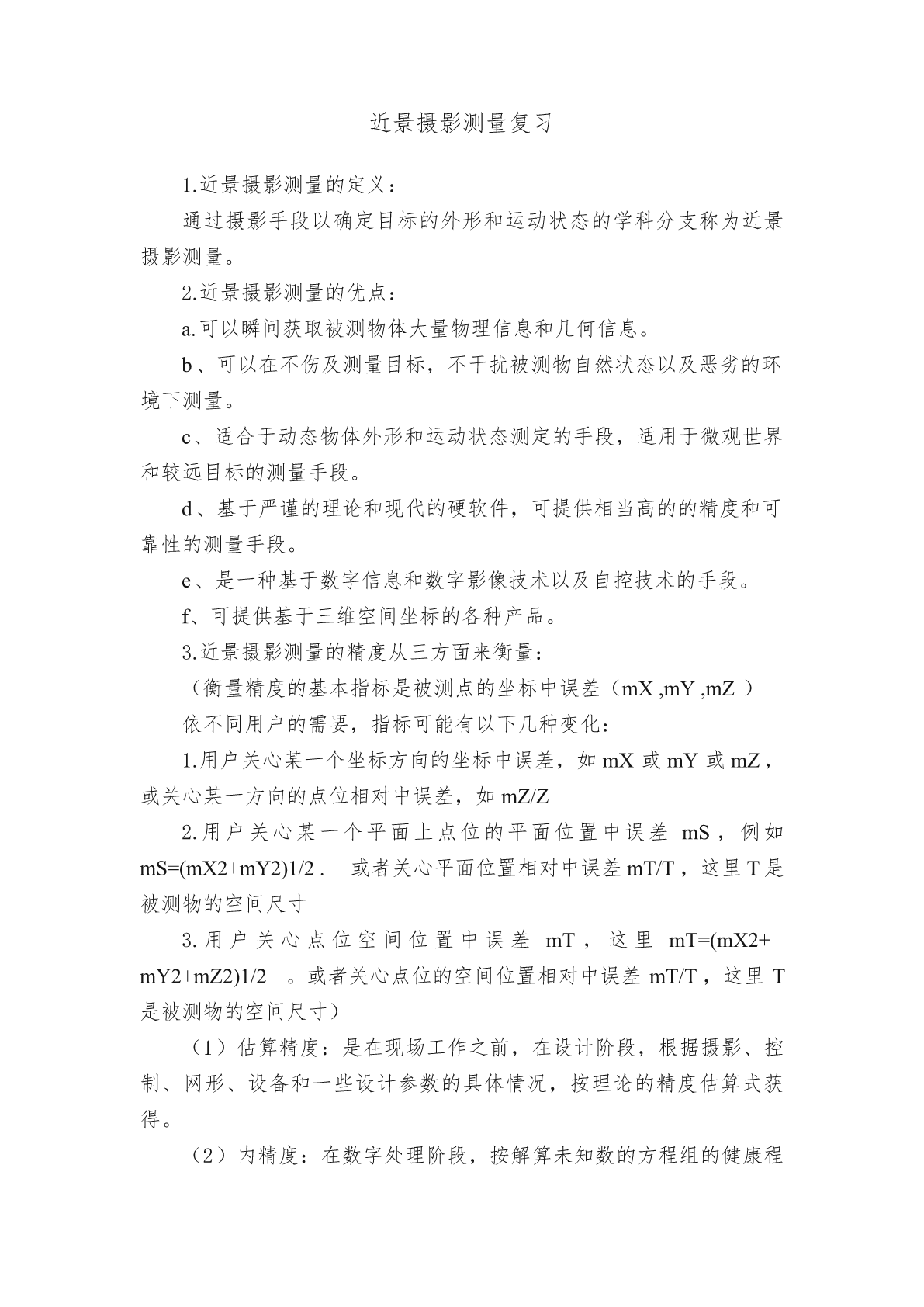
近景摄影测量复习1.近景摄影测量的定义:通过摄影手段以确定目标的外形和运动状态的学科分支称为近景摄影测量。2.近景摄影测量的优点:a.可以瞬间获取被测物体大量物理信息和几何信息。b、可以在不伤及测量目标,不干扰被测物自然状态以及恶劣的环境下测量。c、适合于动态物体外形和运动状态测定的手段,适用于微观世界和较远目标的测量手段。d、基于严谨的理论和现代的硬软件,可提供相当高的的精度和可靠性的测量手段。e、是一种基于数字信息和数字影像技术以及自控技术的手段。f、可提供基于三维空间坐标的各种产品。3.近景摄影测量

近景摄影测量复习资料.docx
第一章1.近景摄影测量(Close-rangePhotogrammetry):通过摄影手段以确定(地形以外)目标的外形和运动状态。是摄影测量与遥感(Photogrammetry&RemoteSensing)学科的一个分支。2.与航空摄影测量的异同点相同点⑴.基本原理相同⑵.模拟处理方法、解析处理方法、数字影像处理方法相同⑶.某些内业摄影测量仪器的使用不同点:⑴.被测量目标物不同航空摄影测量目标物以地形、地貌为主;近景摄影测量目标物各式各样、千差万别,大到寺庙、飞机、海轮,中到汽车、脚印,小到青蛙、手腕骨、

近景摄影测量.pptx
近景摄影测量在建筑物变形观察中旳精度分析1概述近景摄影测量亦称非地形摄影测量,它是应用在工程与工业中旳摄影测量,也是摄影测量旳一种分支。所谓近景摄影测量是在近距离范围对研究各类目旳进行摄影,以拟定所研究对象上点旳二维或三维坐标数据或绘出目旳图件旳科学技术和工艺。近景摄影测量在建筑物变形观察中旳应用非常广泛,目前已广泛地用于科学技术旳各个领域,如建筑物旳变形观察,建筑构造、地质、矿山、环境工程、考古、生物医学、体育、汽车等各个领域,因为应用旳领域非常广阔,甚至能够说:“凡可摄影旳目旳,都可量测”。但是摄影测
近景摄影测量.pptx
工程与工业摄影测量第一章绪论第一章绪论第一章绪论第三章近景摄影测量的摄像设备

近景摄影测量实习心得.docx
近景摄影测量实习心得近景摄影测量实习心得某些事情让我们心里有了一些心得后,可以寻思将其写进心得体会中,这样可以不断更新自己的想法。那么心得体会怎么写才恰当呢?下面是小编精心整理的近景摄影测量实习心得,希望对大家有所帮助。近景摄影测量实习心得1在本学期的第13周,我们开始了摄影测量学的实习。通过实习我认识到摄影测量学是通过获取立体影像来研究和确定被摄物体的形状、大小、空间位置、性质和相互关系的一门信息科学与技术。摄影测量教学实习是摄影测量学课程教学的重要组成部分。通过实习将课堂理论与实践相结合,使学生深入掌