
机器人自适应转向单神经元PID控制方法.pdf

是丹****ni


1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人自适应转向单神经元PID控制方法.pdf
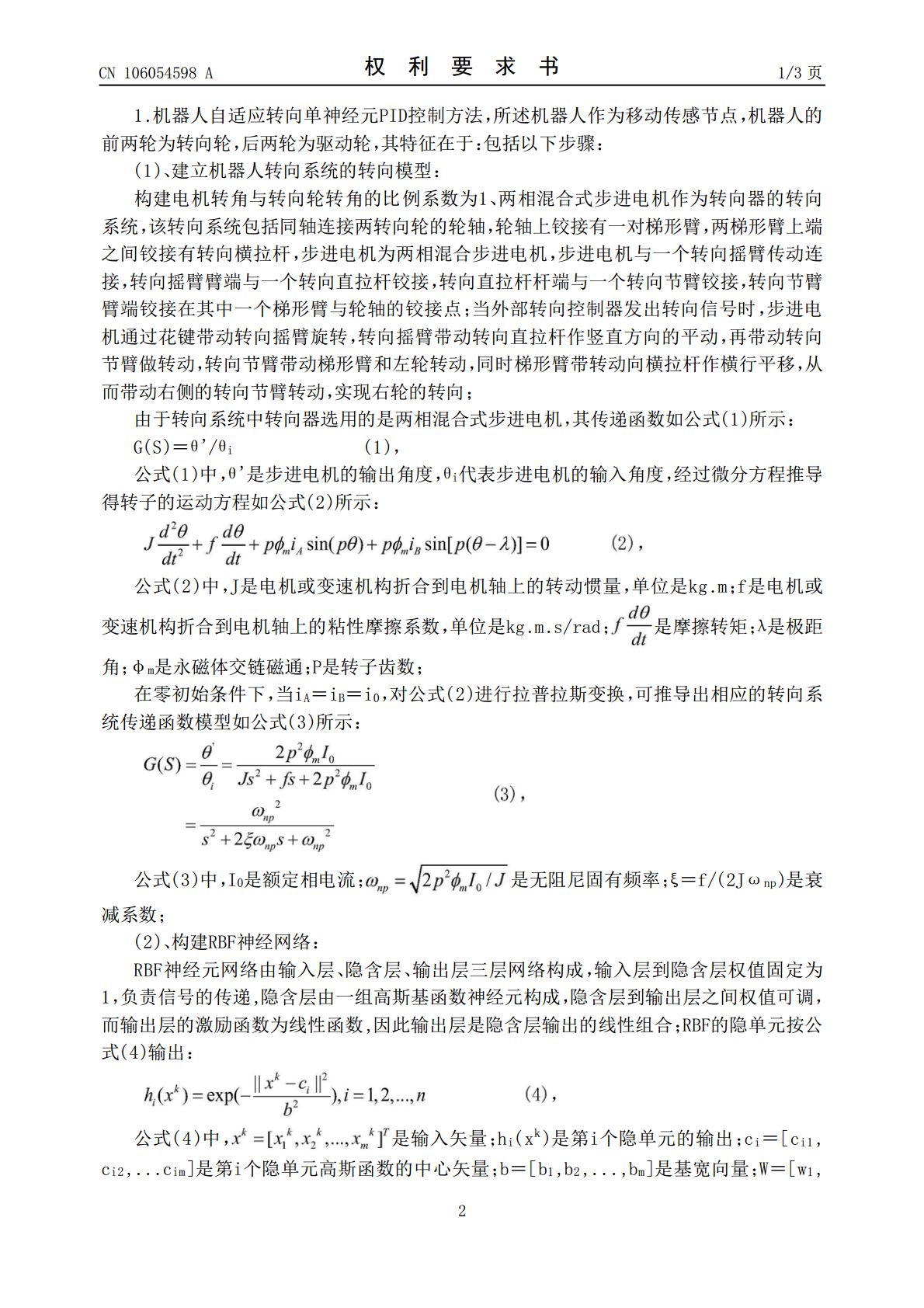
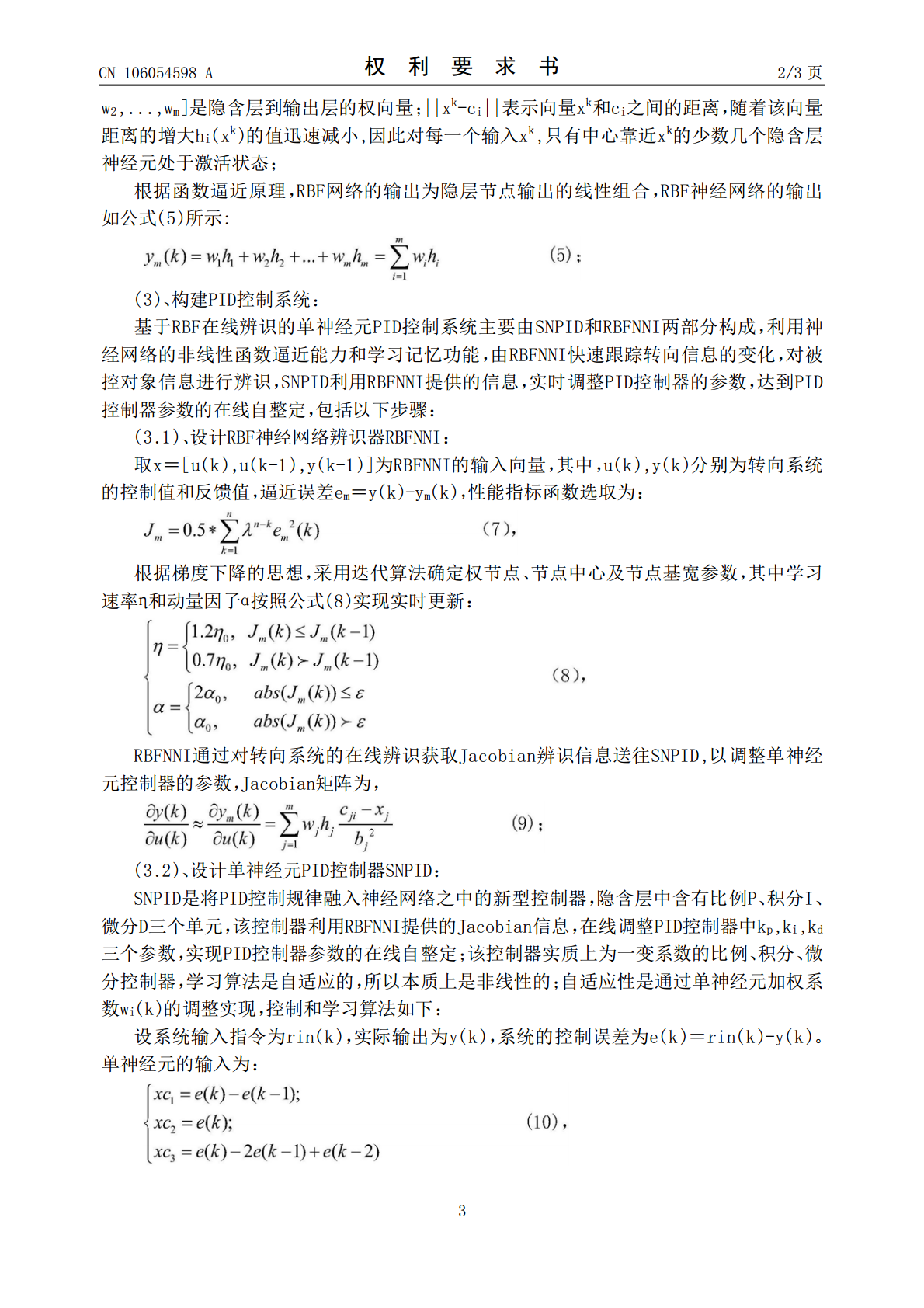
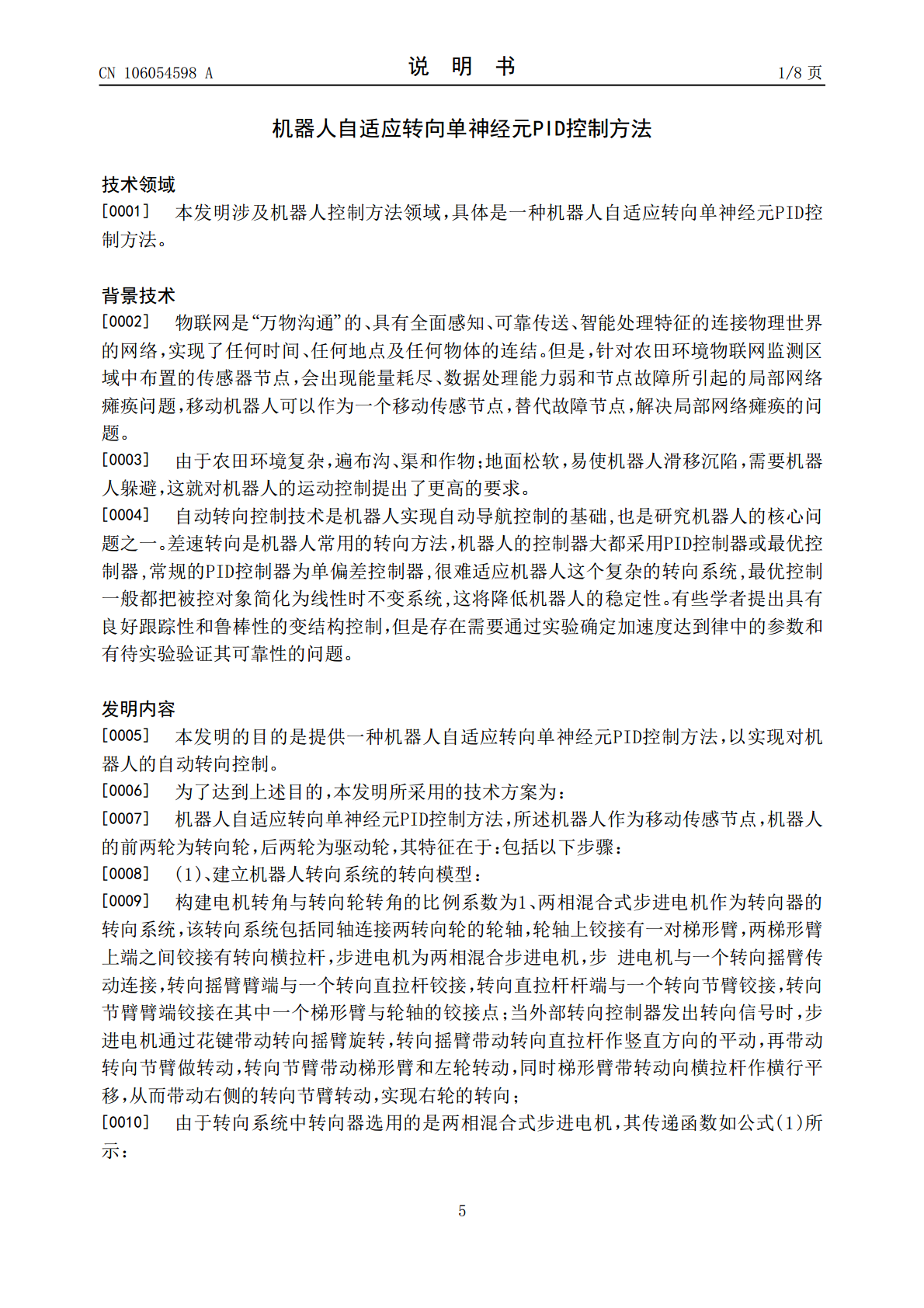
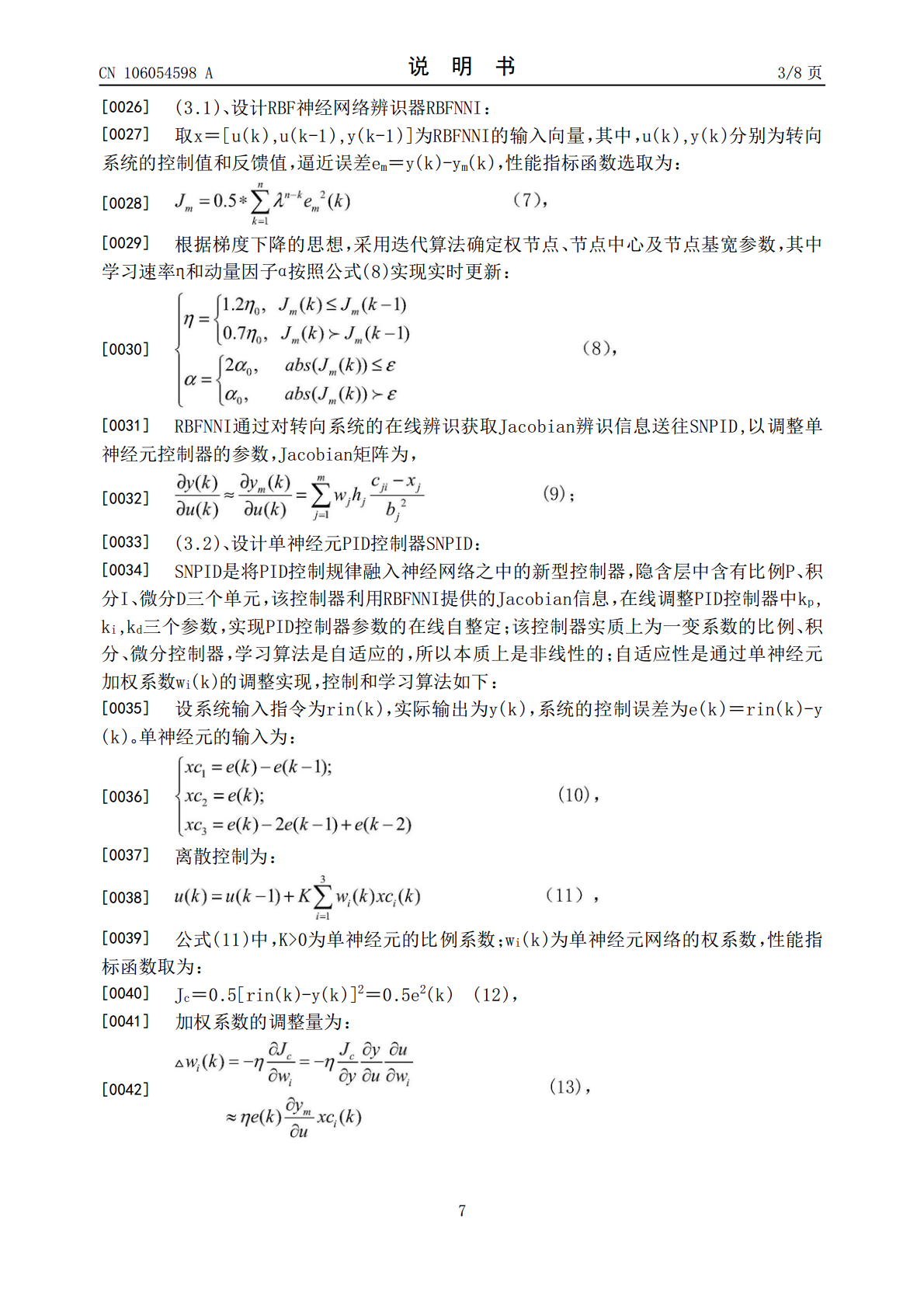
本发明公开了一种机器人自适应转向单神经元PID控制方法,首先建立机器人转向系统的转向模型,然后构建RBF神经网络,最后构建PID控制系统。本发明针对机器人转向系统的机械结构及数学模型的特点,设计了基于RBF在线辨识的机器人转向单神经元PID控制,将RBF神经网络与单神经元PID控制相结合应用于非线性的机器人转向系统,既充分利用了RBF神经网络最佳逼近性能的特点和单神经元适应性强的优点,也克服了PID控制中学习算法的不足。

单神经元自适应PID控制算法.doc
单神经元自适应PID控制算法单神经元自适应PID控制算法单神经元自适应PID控制算法单神经元自适应PID控制算法一、单神经元PID算法思想神经元网络是智能控制的一个重要分支,神经元网络是以大脑生理研究成果为基础,模拟大脑的某些机理与机制,由人工建立的以有向图为拓扑结构的网络,它通过对连续或断续的输入做状态响应而进行信息处理;神经元网络是本质性的并行结构,并且可以用硬件实现,它在处理对实时性要求很高的自动控制问题显示出很大的优越性;神经元网络是本质性的非线性系统,多层神经元网络具有逼近任意函

单神经元自适应PID控制算法.doc
单神经元自适应PID控制算法一、单神经元PID算法思想神经元网络是智能控制的一个重要分支,神经元网络是以大脑生理研究成果为基础,模拟大脑的某些机理与机制,由人工建立的以有向图为拓扑结构的网络,它通过对连续或断续的输入做状态响应而进行信息处理;神经元网络是本质性的并行结构,并且可以用硬件实现,它在处理对实时性要求很高的自动控制问题显示出很大的优越性;神经元网络是本质性的非线性系统,多层神经元网络具有逼近任意函数的能力,它给非线性系统的描述带来了统一的模型;神经元网络具有很强的信息综合能力,它

单神经元自适应PID控制算法.doc
单神经元自适应PID控制算法单神经元自适应PID控制算法单神经元自适应PID控制算法单神经元自适应PID控制算法一、单神经元PID算法思想神经元网络是智能控制的一个重要分支,神经元网络是以大脑生理研究成果为基础,模拟大脑的某些机理与机制,由人工建立的以有向图为拓扑结构的网络,它通过对连续或断续的输入做状态响应而进行信息处理;神经元网络是本质性的并行结构,并且可以用硬件实现,它在处理对实时性要求很高的自动控制问题显示出很大的优越性;神经元网络是本质性的非线性系统,多层神经元网络具有逼近任意函数的能力,它给非

(完整word版)单神经元自适应PID控制算法.doc
单神经元自适应PID控制算法一、单神经元PID算法思想神经元网络是智能控制的一个重要分支,神经元网络是以大脑生理研究成果为基础,模拟大脑的某些机理与机制,由人工建立的以有向图为拓扑结构的网络,它通过对连续或断续的输入做状态响应而进行信息处理;神经元网络是本质性的并行结构,并且可以用硬件实现,它在处理对实时性要求很高的自动控制问题显示出很大的优越性;神经元网络是本质性的非线性系统,多层神经元网络具有逼近任意函数的能力,它给非线性系统的描述带来了统一的模型;神经元网络具有很强的信息综合能力,它