
PLC实现步进电机的正反转及调整控制.pdf

文库****品店

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

PLC实现步进电机的正反转及调整控制.pdf
.实训课题三PLC实现步进电机正反转和调速控制一、实验目的1、掌握步进电机的工作原理2、掌握带驱动电源的步进电机的控制方法3、掌握DECO指令实现步进电机正反转和调速控制的程序二、实训仪器和设备、一台1FX2N-48MRPLC2、两相四拍带驱动电源的步进电机一套3、正反切换开关、起停开关、增减速开关各一个三、步进电机工作原理步进电机是纯粹的数字控制电动机它将电脉

PLC实现步进电机的正反转及调整控制.pdf
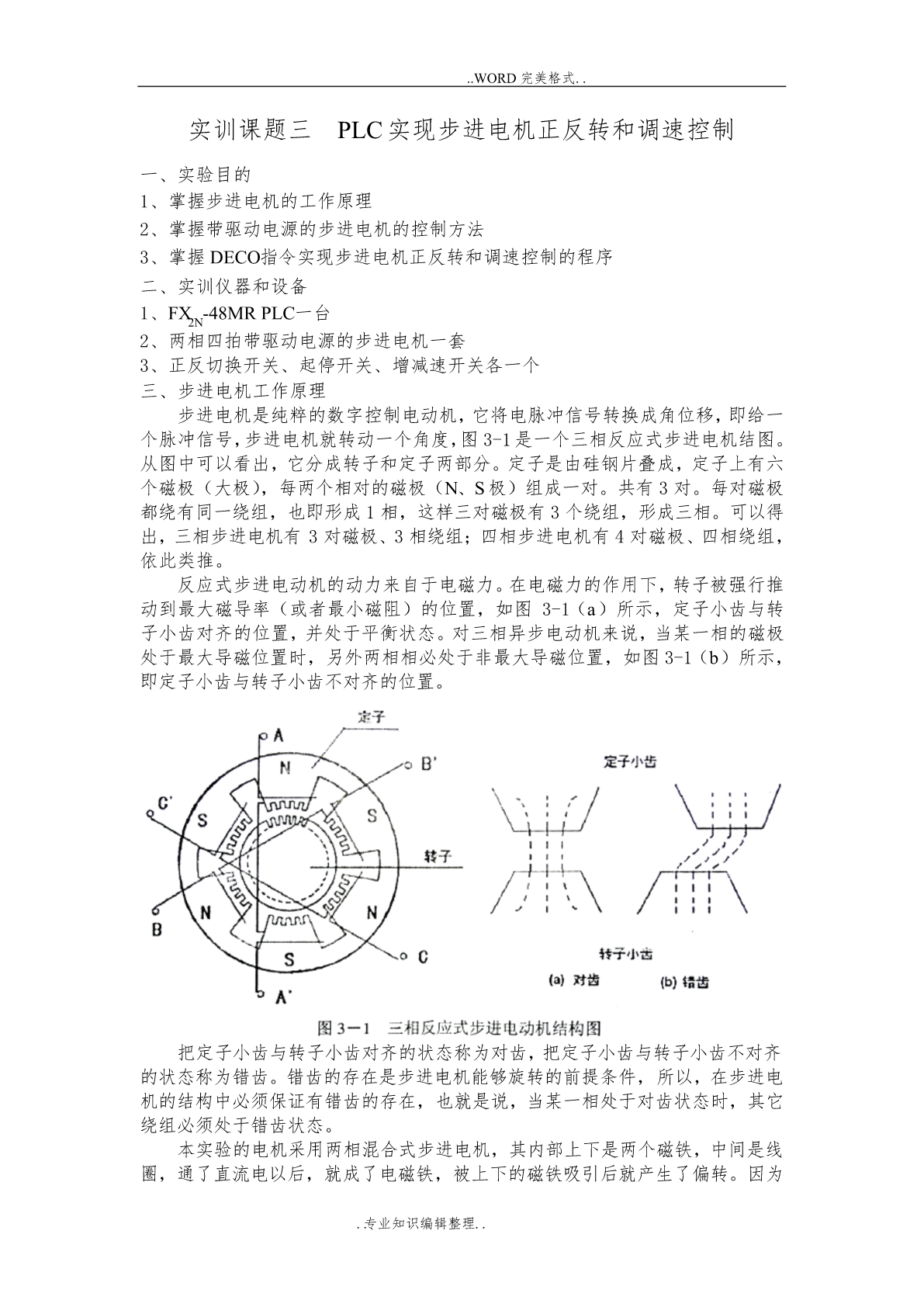
.-实训课题三PLC实现步进电机正反转和调速控制一、实验目的1、掌握步进电机的工作原理2、掌握带驱动电源的步进电机的控制方法3、掌握DECO指令实现步进电机正反转和调速控制的程序二、实训仪器和设备1、FX-48MRPLC一台2N2、两相四拍带驱动电源的步进电机一套3、正反切换开关、起停开关、增减速开关各一个三、步进电机工作原理步进电机是纯粹的数字控制电动机,它将电脉冲信号转换成角位移,即给一个脉冲信号,步进电机就转动一个角度,图3-1是一个三相反应式步进电机结图。从图中可以看出,它分成转子和定子两部分。定

PLC实现步进电机的正反转及调整控制.pdf
..WORD完美格式..实训课题三PLC实现步进电机正反转和调速控制一、实验目的1、掌握步进电机的工作原理2、掌握带驱动电源的步进电机的控制方法3、掌握DECO指令实现步进电机正反转和调速控制的程序二、实训仪器和设备1、一台FX2N-48MRPLC2、两相四拍带驱动电源的步进电机一套3、正反切换开关、起停开关、增减速开关各一个三、步进电机工作原理步进电机是纯粹的数字控制电动机,它将电脉冲信号转换成角位移,即给一个脉冲信号,步进电机就转动一个角度,图3-1是一个三相反应式步进电机结图。从图中可以看出,它分成

PLC实现步进电机的正反转和调整控制.doc
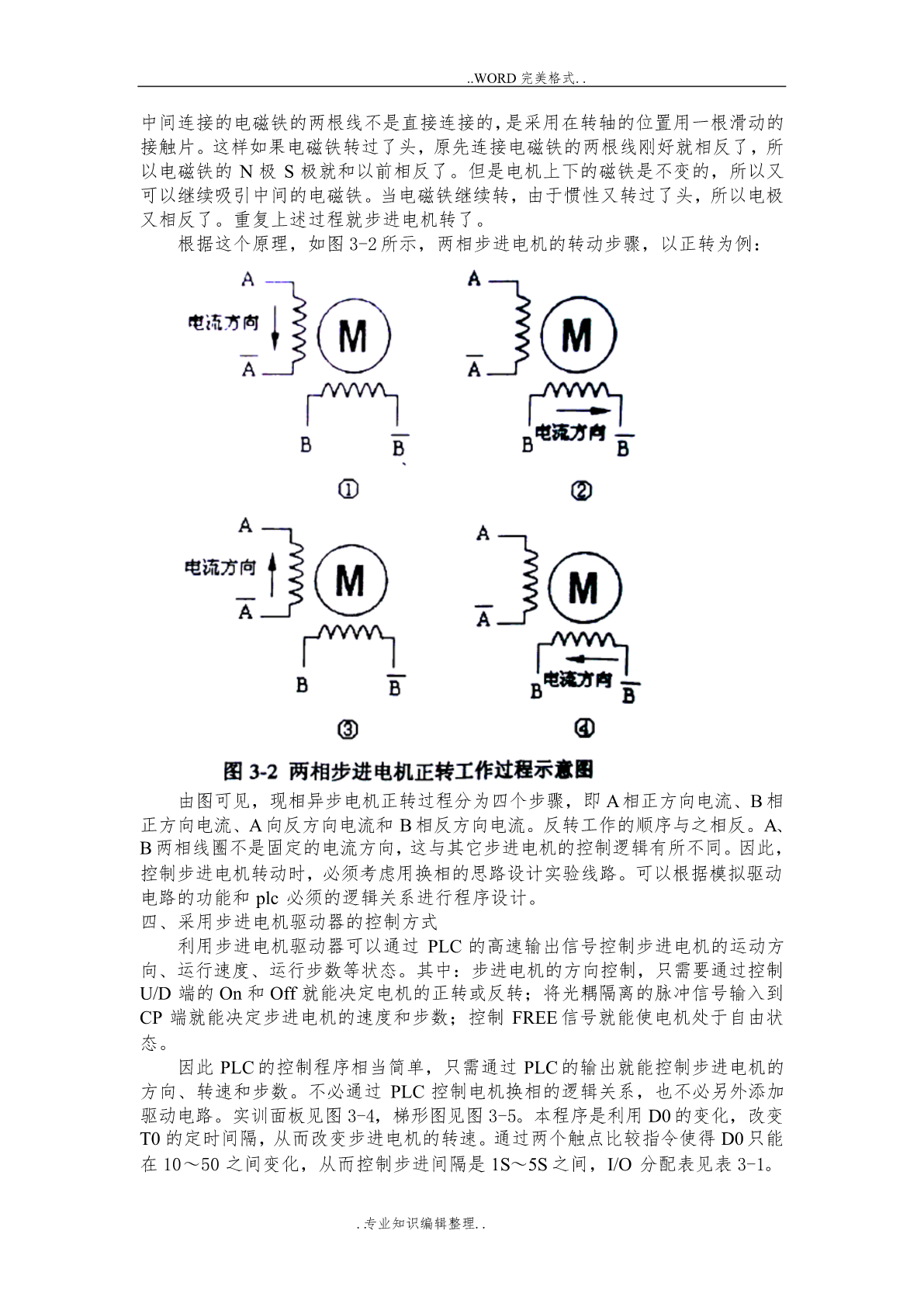
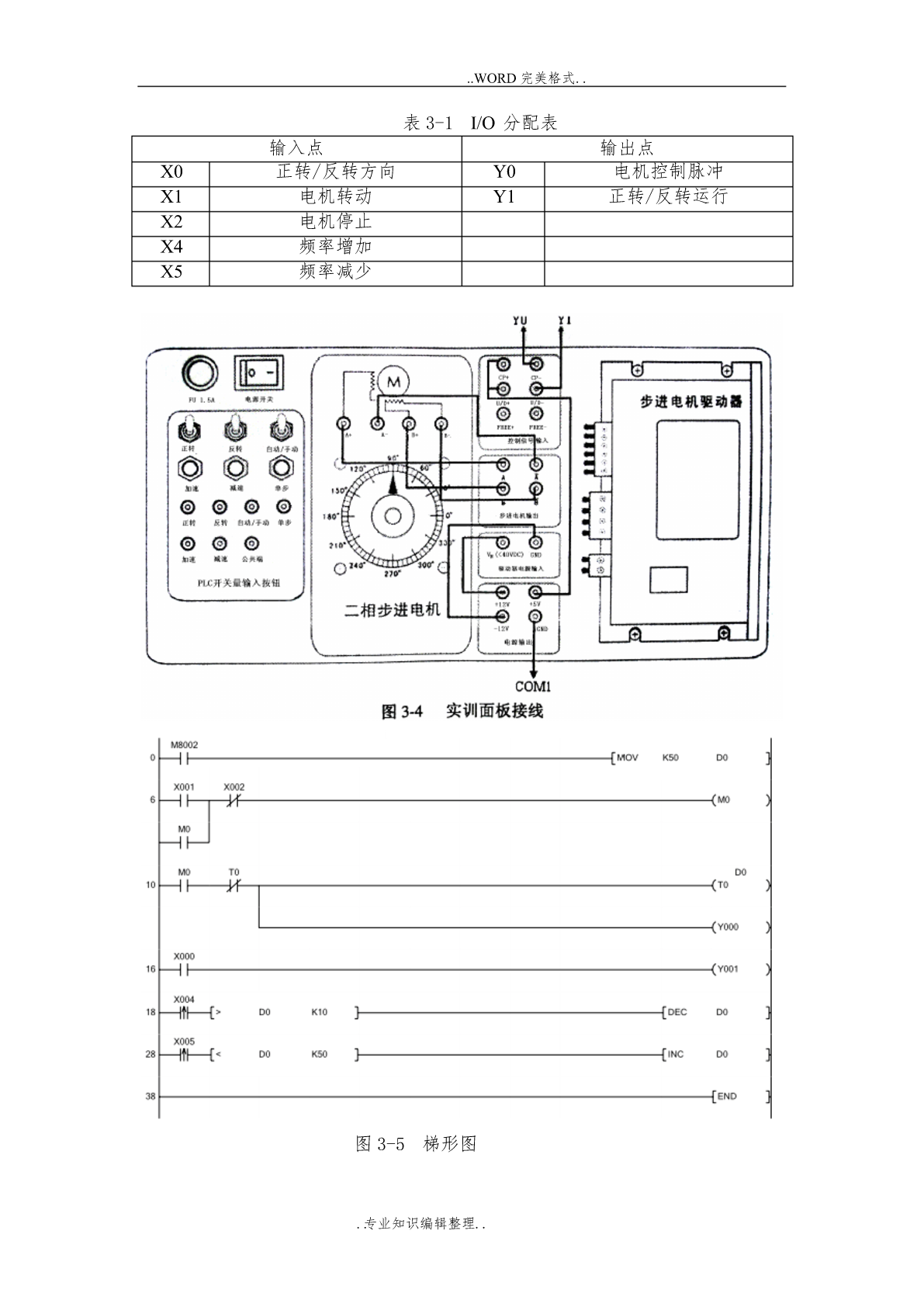
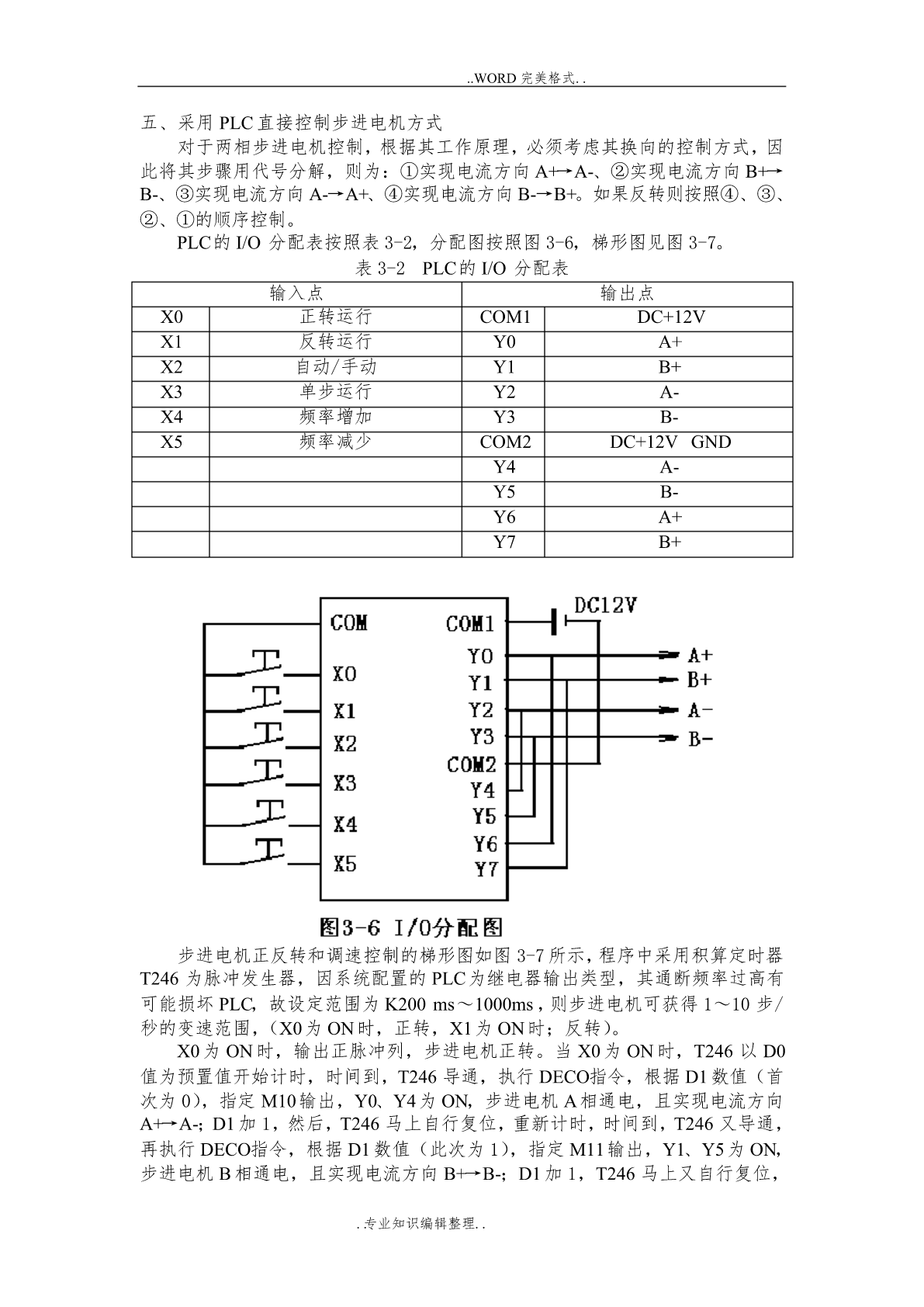
实训课题三PLC实现步进电机正反转和调速控制一、实验目的1、掌握步进电机的工作原理2、掌握带驱动电源的步进电机的控制方法3、掌握DECO指令实现步进电机正反转和调速控制的程序二、实训仪器和设备1、FX2N-48MRPLC一台2、两相四拍带驱动电源的步进电机一套3、正反切换开关、起停开关、增减速开关各一个三、步进电机工作原理步进电机是纯粹的数字控制电动机,它将电脉冲信号转换成角位移,即给一个脉冲信号,步进电机就转动一个角度,图3-1是一个三相反应式步进电机结图。从图中可以看出,它分成转子和定子两部分。定子是

PLC控制步进电机正反转.doc
实验名称:步进电机正反转的PLC控制一、实验目的了解步进电机运转的基本原理和步进电机控制系统的基本组成,熟练运用梯形图语言进行编程,掌握用PLC控制系统控制步进电机正反转的方法。二、实验要求通过查找相关资料和教师讲解了解步进电机运转的基本原理和步进电机控制系统的基本组成;以实验室西门子SIMATICS7-200为硬件设备,认识掌握用PLC控制系统控制步进电机正反转的方法;学习STEP7-Micro/WIN4.0软件,运用梯形图语言进行编程。三、实验设备西门子SIMATICS7