
机械臂的轨迹规划.doc

赫赫****等你


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共38页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机械臂的轨迹规划.doc
机械臂运动旳轨迹规划摘要空间机械臂是一种机、电、热、控一体化旳高集成旳空间机械系统。伴随科技旳发展,尤其是航空飞机、机器人等旳诞生得到了广泛旳应用,空间机械臂作为在轨迹旳支持、服务等以备受人们旳关注。本文将以空间机械臂为研究对象,针对空间机械臂旳直线运动、关节旳规划、空间直线以及弧线旳轨迹规划几种方面进行研究,对机械臂运动和工作空间进行了分析,同步对机械臂旳轨迹规划进行了验证,运用MATLAB软件对机械臂旳轨迹进行仿真,验证算法旳对旳性和可行性,同步此途径规划措施可以提高机械臂旳作业效率,为机械臂操作提高

机械臂的轨迹规划方案.doc
机械臂运动轨迹规划摘要空间机械臂是一种机、电、热、控一体化高集成空间机械系统。随着科技发展,特别是航空飞机、机器人等诞生得到了广泛应用,空间机械臂作为在轨迹支持、服务等以备受人们关注。本文将以空间机械臂为研究对象,针对空间机械臂直线运动、关节规划、空间直线以及弧线轨迹规划几种方面进行研究,对机械臂运动和工作空间进行了分析,同步对机械臂轨迹规划进行了验证,运用MATLAB软件对机械臂轨迹进行仿真,验证算法对的性和可行性,同步此途径规划办法可以提高机械臂作业效率,为机械臂操作提高理论指引,为机器人更复杂运动仿

自主移动机械臂轨迹规划.docx
自主移动机械臂轨迹规划自主移动机械臂轨迹规划摘要:近年来,自主移动机械臂成为了研究和应用领域的热点,其灵活性和多功能性广泛应用于物流、制造业、医疗和农业等领域。在自主移动机械臂的应用中,轨迹规划是一个重要的技术,用于确定机械臂运动的路径,以实现准确、高效的操作。本文将介绍自主移动机械臂轨迹规划的相关技术,并探讨其在不同领域的应用。引言:自主移动机械臂是一种能够在不需人为干预下进行移动和操作的装置。它结合了机械臂和移动机器人的特点,能够完成物体抓取、搬运、装配等任务。而轨迹规划作为自主移动机械臂运动的基本要
一种机械臂轨迹规划方法.pdf
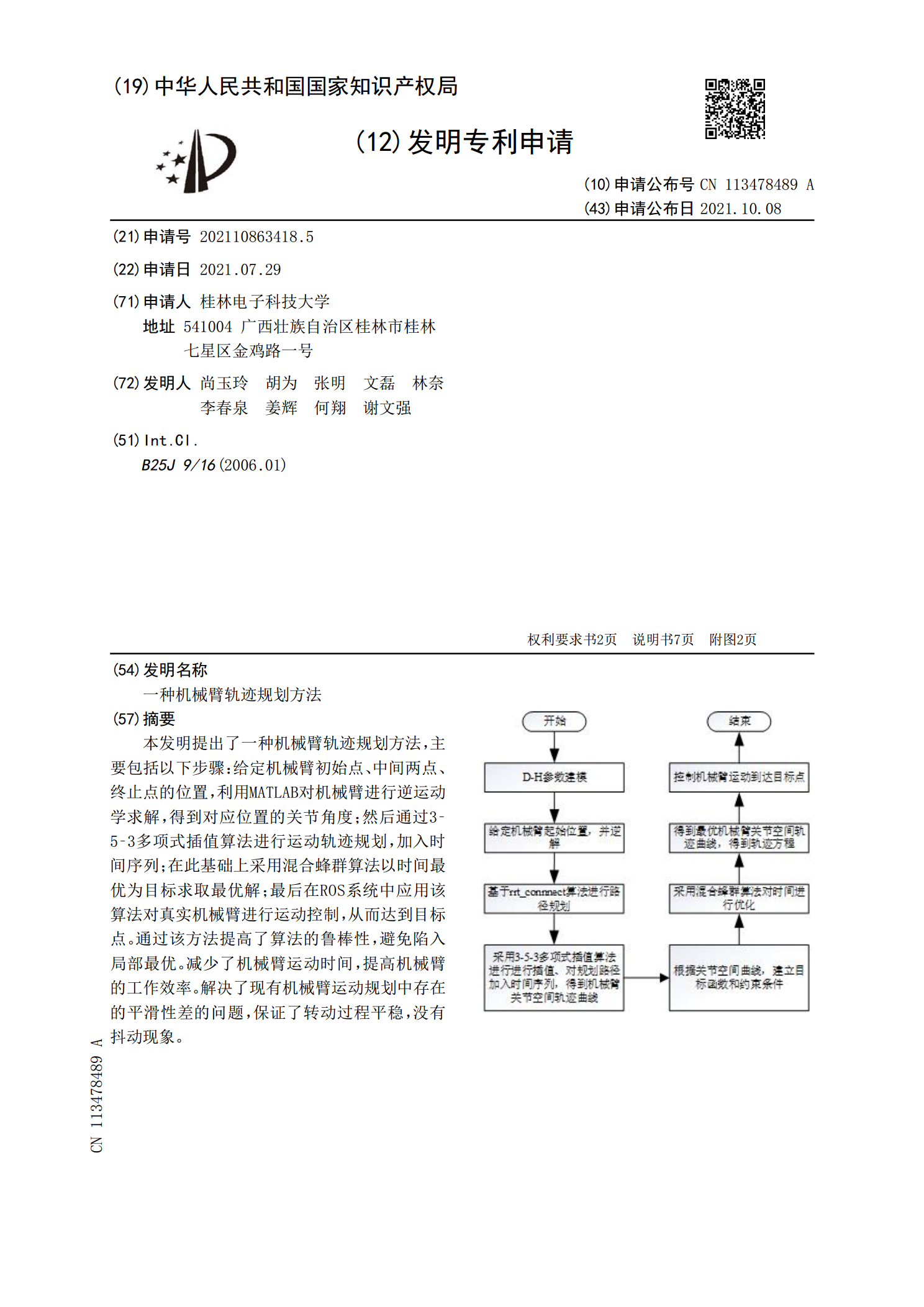
本发明提出了一种机械臂轨迹规划方法,主要包括以下步骤:给定机械臂初始点、中间两点、终止点的位置,利用MATLAB对机械臂进行逆运动学求解,得到对应位置的关节角度;然后通过3‑5‑3多项式插值算法进行运动轨迹规划,加入时间序列;在此基础上采用混合蜂群算法以时间最优为目标求取最优解;最后在ROS系统中应用该算法对真实机械臂进行运动控制,从而达到目标点。通过该方法提高了算法的鲁棒性,避免陷入局部最优。减少了机械臂运动时间,提高机械臂的工作效率。解决了现有机械臂运动规划中存在的平滑性差的问题,保证了转动过程平稳,

基于LM算法的机械臂轨迹规划研究.docx
基于LM算法的机械臂轨迹规划研究基于LM算法的机械臂轨迹规划研究摘要:随着机器人技术的快速发展,机械臂在工业生产和服务领域扮演着重要的角色。机械臂轨迹规划是机械臂控制的基本问题之一,对于实现高效、准确的机械臂运动具有重要意义。本文以LM算法为基础,探讨了机械臂轨迹规划的研究,并通过仿真实验验证了算法的有效性和可行性。关键词:机械臂,轨迹规划,LM算法,控制一、引言机械臂作为一种多自由度机器人,具有高度灵活性和可编程性,被广泛应用于各种工业生产和服务领域。机械臂轨迹规划是控制机械臂精确运动的关键问题,对于提