
机械设计基础复习题(附答案).pdf

文库****品店

1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共47页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机械设计基础复习题A(附答案).pdf
机械设计基础复习题A一、填空题1.两构件通过或接触组成的运动副称为高副。2.满足曲柄存在条件的铰链四杆机构,取与最短杆相邻的杆为机架时,为机构,取最短杆为机架时,为机构。3.在凸轮机构中,常见的从动件运动规律为运动时,将出现冲击。4.直齿圆柱齿轮作接触强度计算时,取处的接触应力为计算依据,其载荷由对齿轮承担。5.为使两对直齿圆柱齿轮能正确啮合,它们的和必须分别相等。6.两齿数不等的一对齿轮传动,其弯曲应力等;两轮硬度不等,其许用弯曲应力等。7.V带传动的主要失效形式是和。8.在设计V带传动时,V带的型号是

机械设计基础复习题附答案.doc
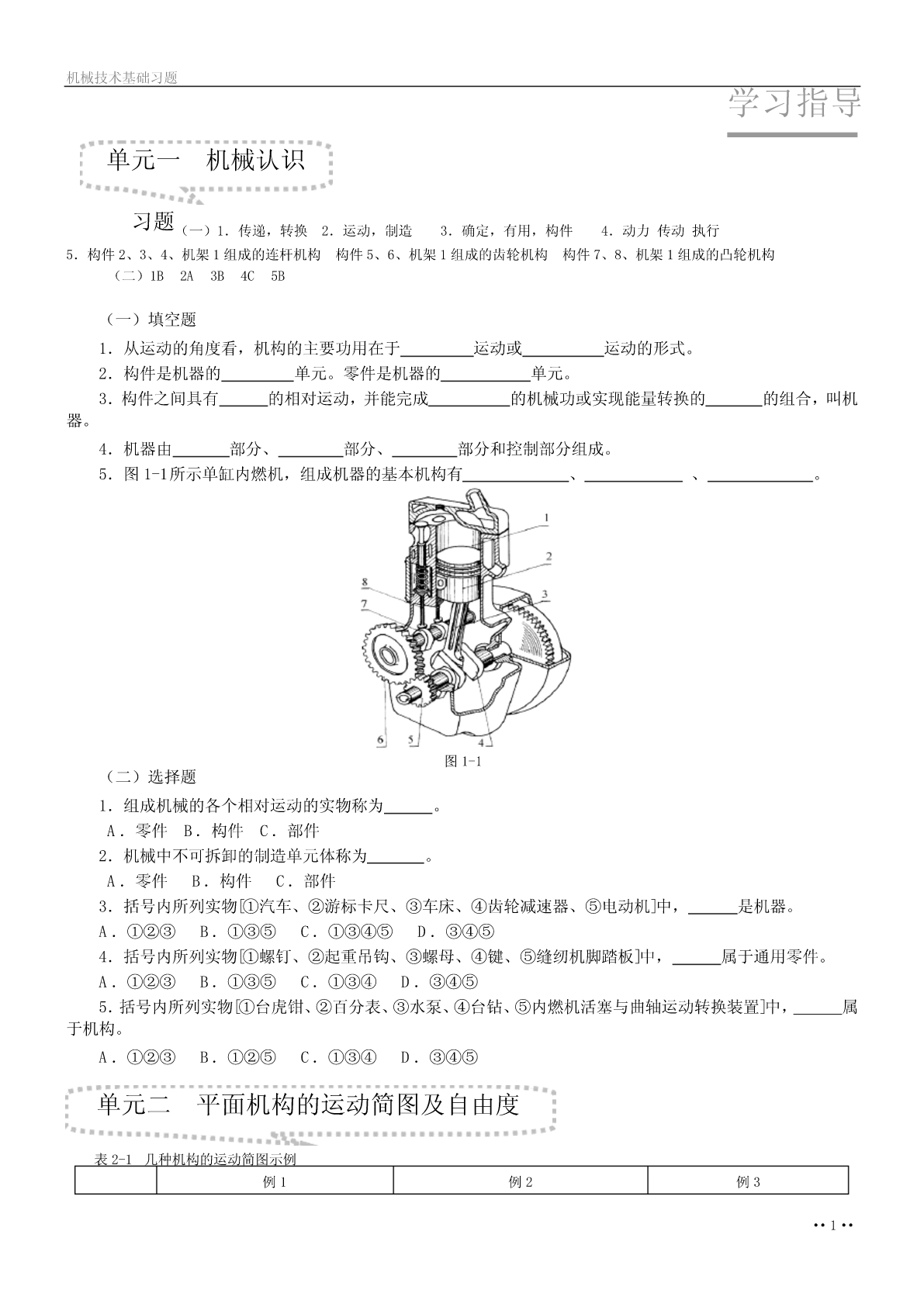
单元一机械结识习题(一)1.传递,转换2.运动,制造3.拟定,有用,构件4.动力传动执行5.构件2、3、4、机架1组成的连杆机构构件5、6、机架1组成的齿轮机构构件7、8、机架1组成的凸轮机构(二)1B2A3B4C5B(一)填空题1.从运动的角度看,机构的重要功用在于运动或运动的形式。2.构件是机器的单元。零件是机器的单元。3.构件之间具有的相对运动,并能完毕的机械功或实现能量转换的的组合,叫机器。4.机器由部分、部分、部分和控制部分组成。5.图1-1所示单缸内燃机,组成机器的基本机构有、、。图1-1(二
机械设计基础复习题A(附答案).pdf
机械设计基础复习题A一、填空题1.两构件通过或接触组成的运动副称为高副。2.满足曲柄存在条件的铰链四杆机构,取与最短杆相邻的杆为机架时,为机构,取最短杆为机架时,为机构。3.在凸轮机构中,常见的从动件运动规律为运动时,将出现冲击。4.直齿圆柱齿轮作接触强度计算时,取处的接触应力为计算依据,其载荷由对齿轮承担。5.为使两对直齿圆柱齿轮能正确啮合,它们的和必须分别相等。6.两齿数不等的一对齿轮传动,其弯曲应力等;两轮硬度不等,其许用弯曲应力等。7.V带传动的主要失效形式是和。8.在设计V带传动时,V带的型号是
机械设计基础复习题(附答案).pdf
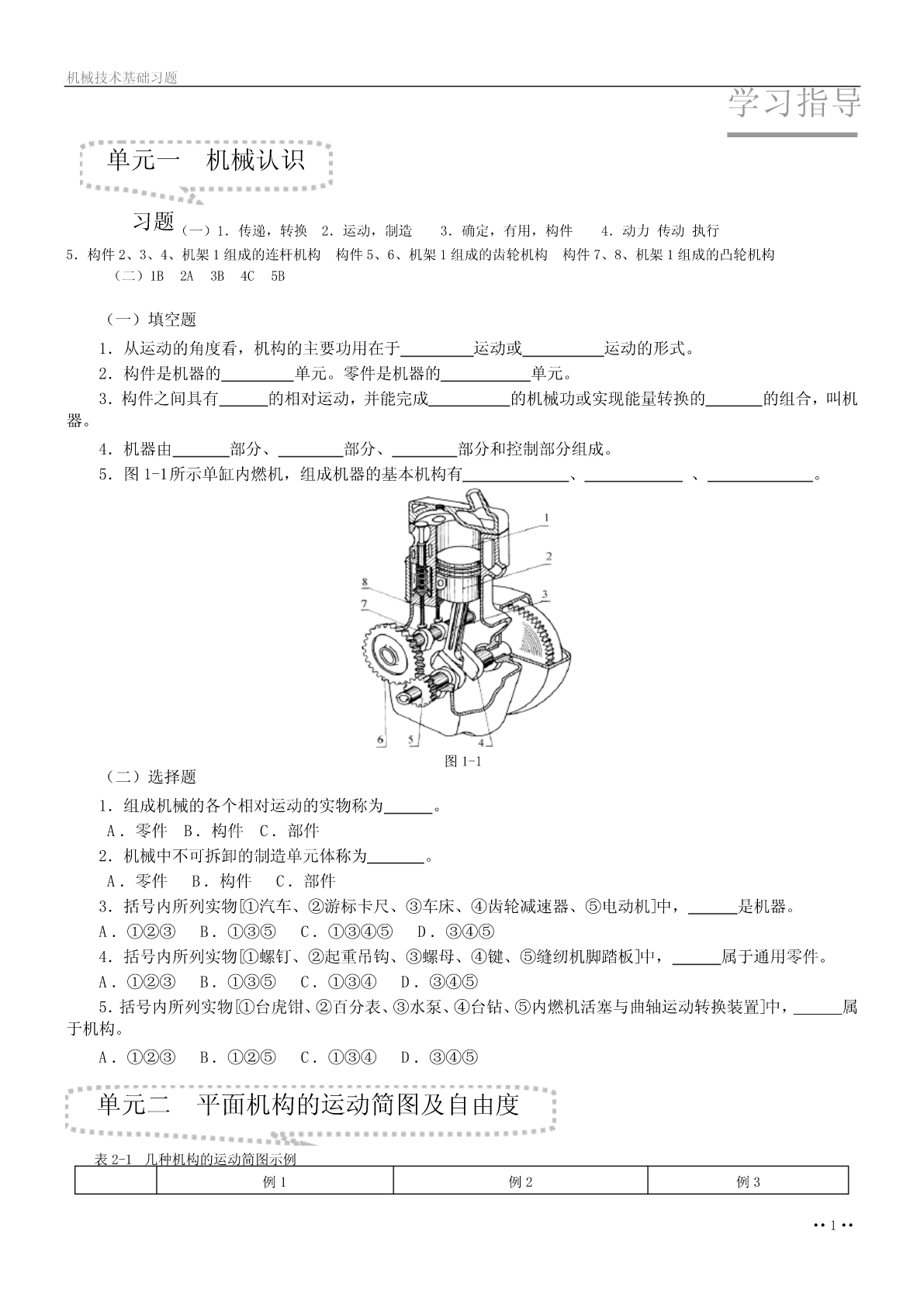
机械技术基础习题学习指导单元一机械认识习题(一)1.传递,转换2.运动,制造3.确定,有用,构件4.动力传动执行5.构件2、3、4、机架1组成的连杆机构构件5、6、机架1组成的齿轮机构构件7、8、机架1组成的凸轮机构(二)1B2A3B4C5B(一)填空题1.从运动的角度看,机构的主要功用在于运动或运动的形式。2.构件是机器的单元。零件是机器的单元。3.构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。4.机器由部分、部分、部分和控制部分组成。5.图1-1所示单缸内燃机,组成机器的基本

机械设计基础复习题A(附答案).pdf
机械设计基础复习题A一、填空题1.两构件通过或接触组成的运动副称为高副。2.满足曲柄存在条件的铰链四杆机构,取与最短杆相邻的杆为机架时,为机构,取最短杆为机架时,为机构。3.在凸轮机构中,常见的从动件运动规律为运动时,将出现冲击。4.直齿圆柱齿轮作接触强度计算时,取处的接触应力为计算依据,其载荷由对齿轮承担。5.为使两对直齿圆柱齿轮能正确啮合,它们的和必须分别相等。6.两齿数不等的一对齿轮传动,其弯曲应力等;两轮硬度不等,其许用弯曲应力等。7.V带传动的主要失效形式是和。8.在设计V带传动时,V带的型号是