
基于改进蚁群算法的收获机器人作业路径规划方法.pdf

努力****振宇


1/10
2/10
3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于改进蚁群算法的收获机器人作业路径规划方法.pdf
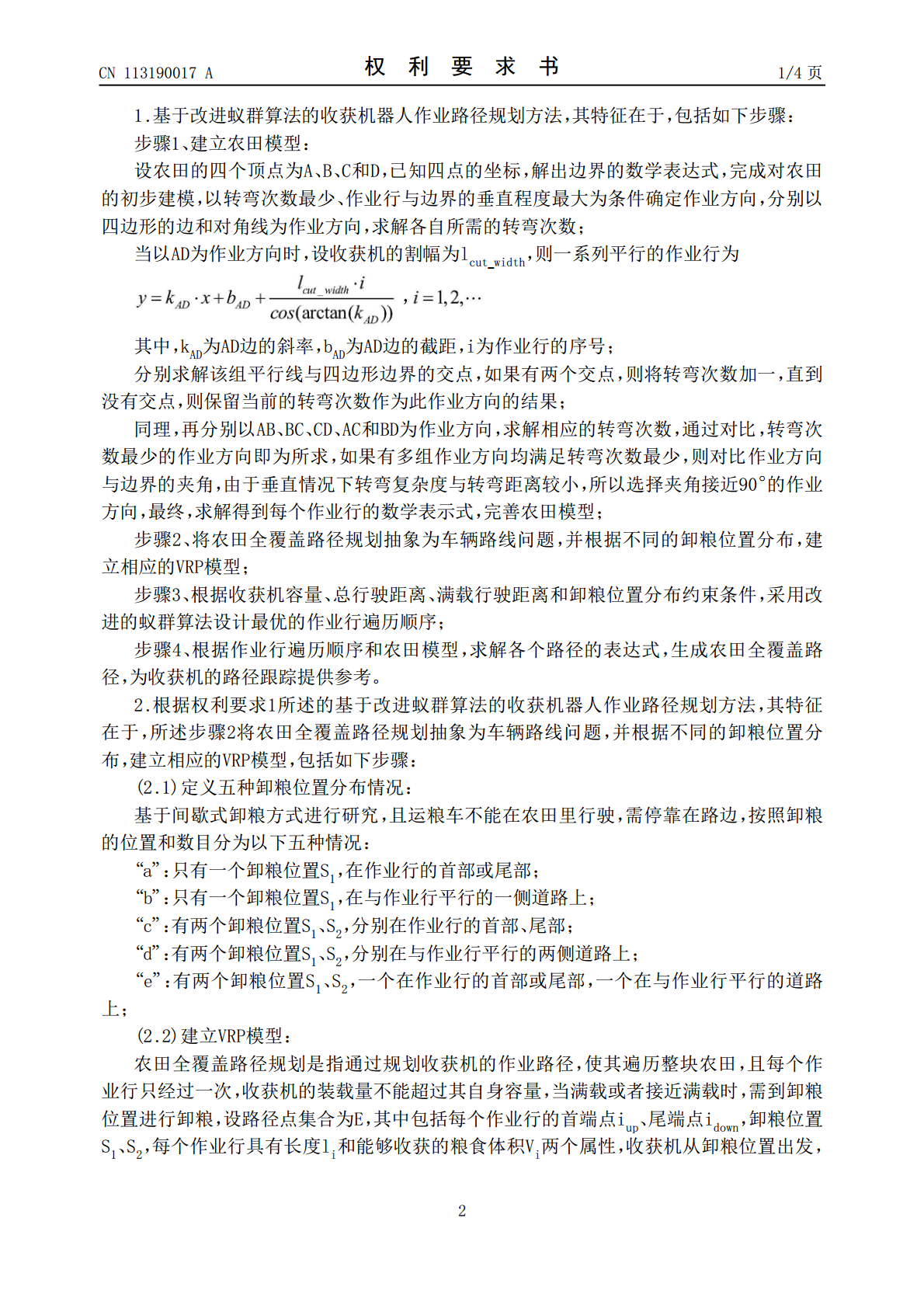
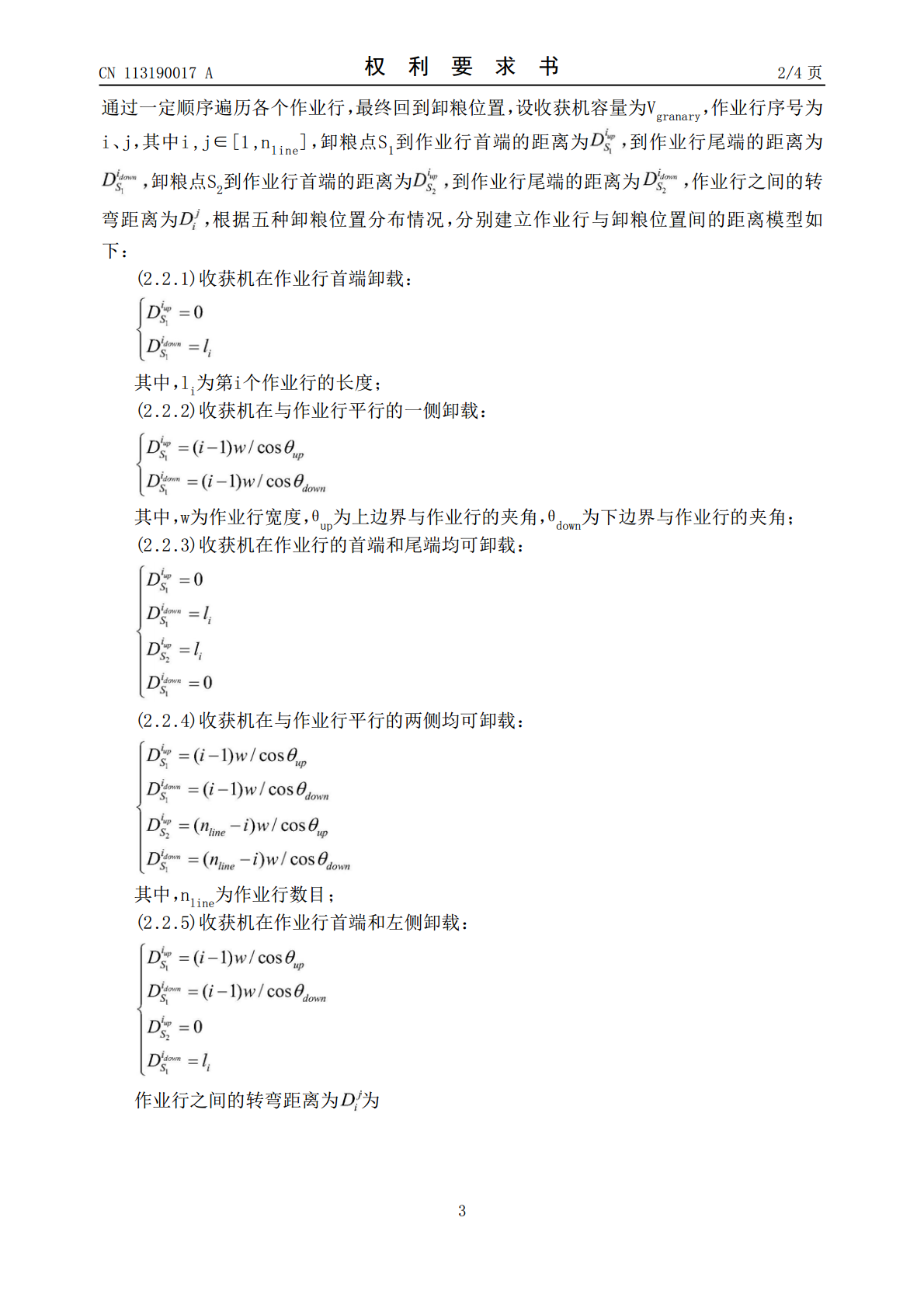
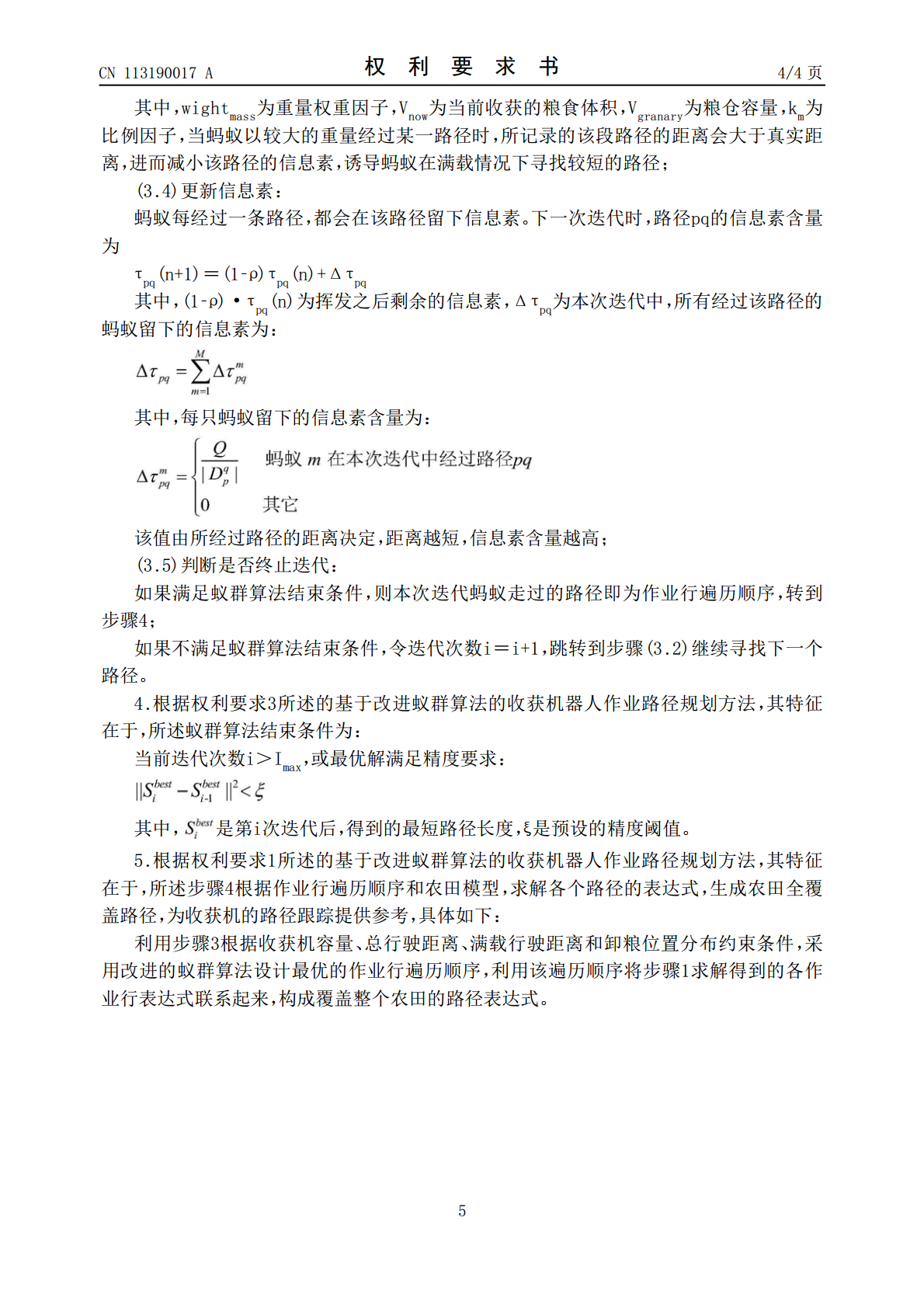
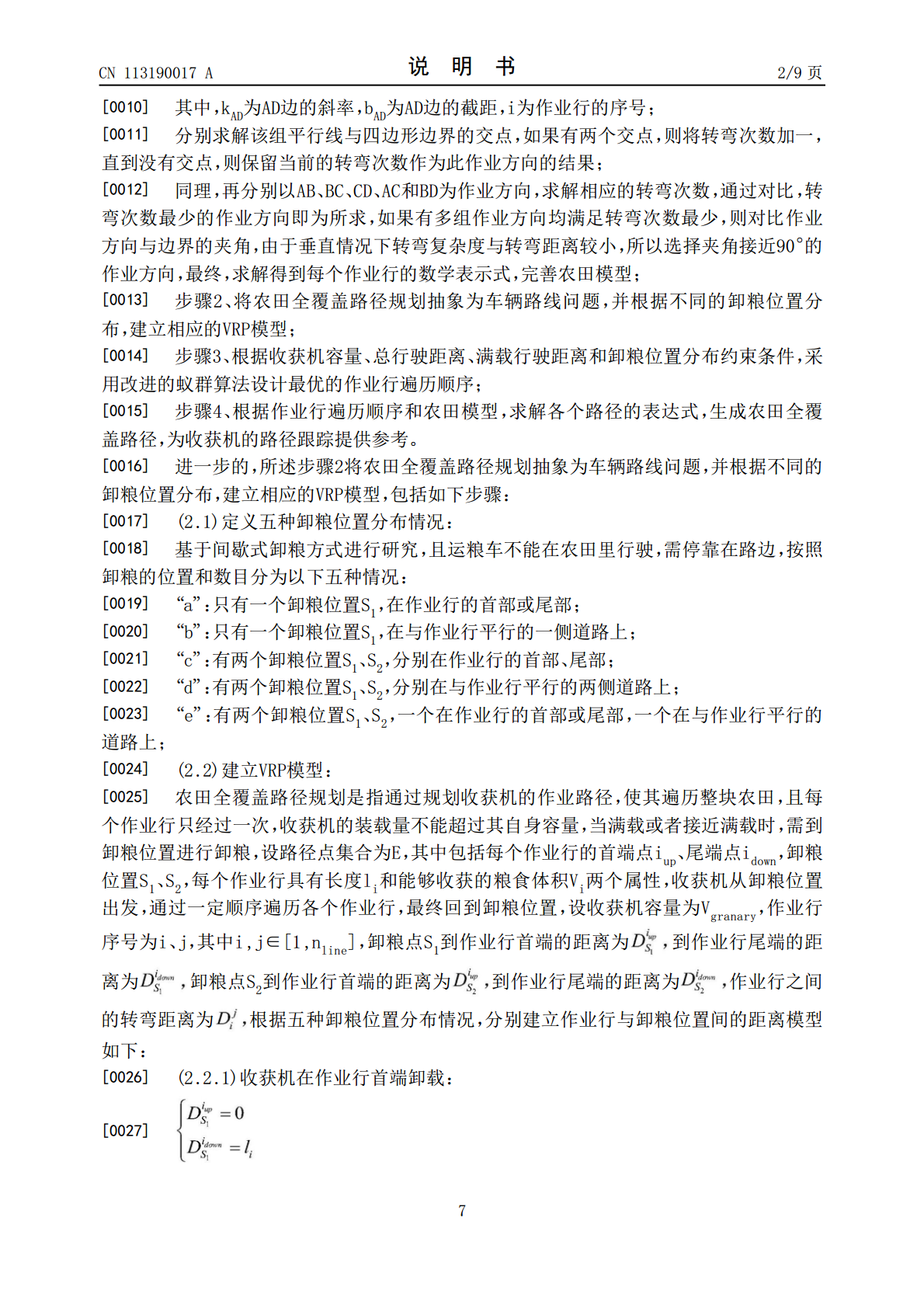
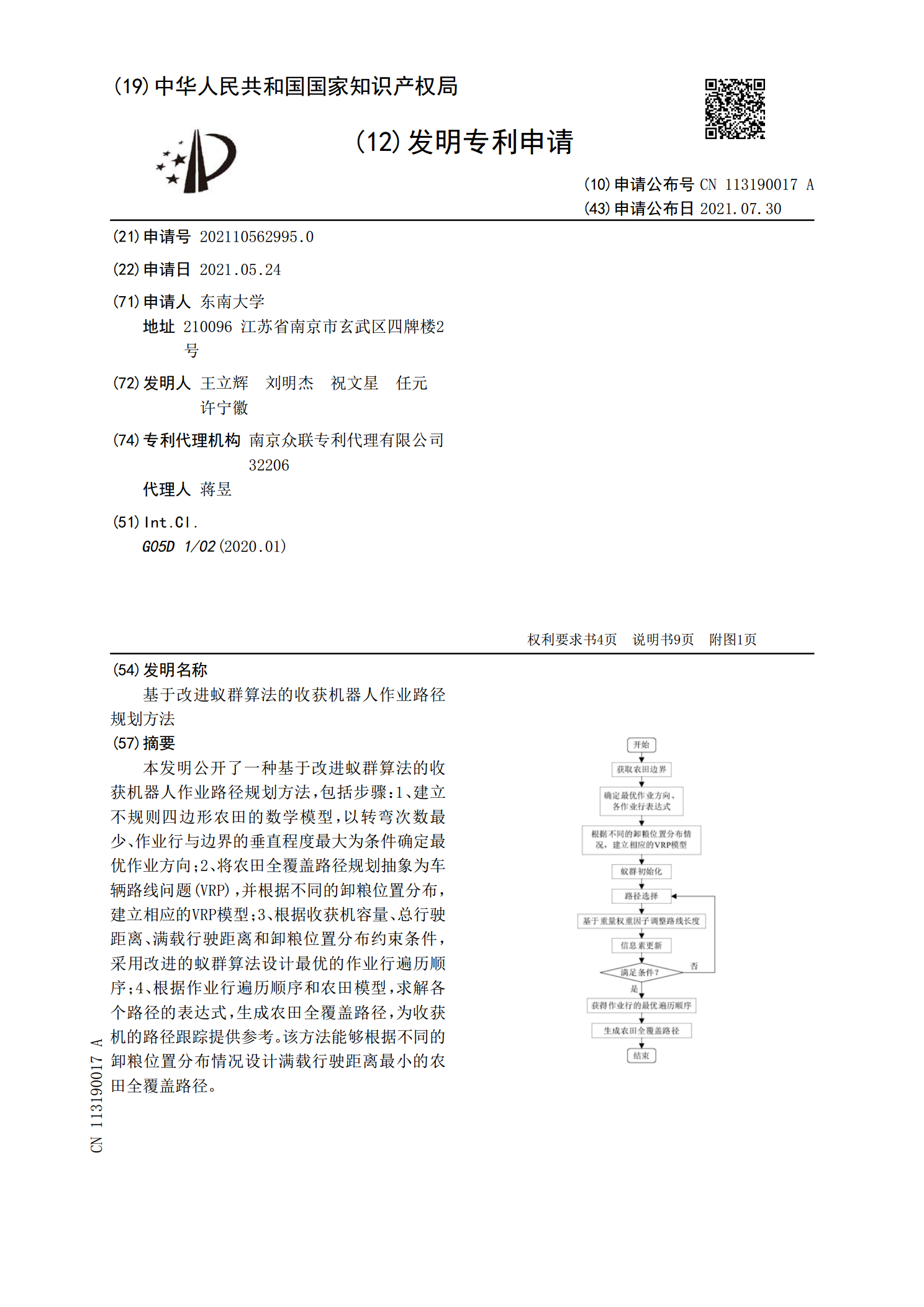
本发明公开了一种基于改进蚁群算法的收获机器人作业路径规划方法,包括步骤:1、建立不规则四边形农田的数学模型,以转弯次数最少、作业行与边界的垂直程度最大为条件确定最优作业方向;2、将农田全覆盖路径规划抽象为车辆路线问题(VRP),并根据不同的卸粮位置分布,建立相应的VRP模型;3、根据收获机容量、总行驶距离、满载行驶距离和卸粮位置分布约束条件,采用改进的蚁群算法设计最优的作业行遍历顺序;4、根据作业行遍历顺序和农田模型,求解各个路径的表达式,生成农田全覆盖路径,为收获机的路径跟踪提供参考。该方法能够根据不同

基于改进蚁群算法的机器人路径规划.docx
基于改进蚁群算法的机器人路径规划1.内容描述本文档主要介绍了基于改进蚁群算法(ImprovedAntColonyOptimization,IACO)的机器人路径规划方法。蚁群算法是一种模拟自然界蚂蚁觅食行为的优化算法,通过模拟蚂蚁在寻找食物过程中的信息素挥发、蚂蚁之间的相互协作等行为来求解问题。机器人路径规划是将这种优化算法应用于机器人运动规划领域,旨在为机器人提供一种高效、灵活的路径规划方法。改进蚁群算法是在传统蚁群算法的基础上进行优化和拓展的一种算法。它主要通过对蚁群算法中的信息素更新策略、参数设置、

基于改进蚁群算法的机器人路径规划.docx
基于改进蚁群算法的机器人路径规划基于改进蚁群算法的机器人路径规划摘要:机器人的路径规划是机器人运动控制的核心问题之一。传统的路径规划算法在计算复杂度和搜索效率上存在一定的不足。为了提高机器人路径规划的性能,本文提出了一种基于改进蚁群算法的新方法。通过引入启发式信息和路径更新策略,优化了蚁群算法在机器人路径规划中的应用。实验结果表明,该方法能够在较短时间内找到最优路径,并具有较好的收敛性和鲁棒性。1.引言机器人的路径规划是指在给定环境中,确定机器人从起点到目标点的最佳路线,以实现任务完成。传统的路径规划算法

基于改进蚁群算法的机器人路径规划算法.docx
基于改进蚁群算法的机器人路径规划算法机器人路径规划是机器人技术中的一个重要问题,它是机器人在实际环境中自主行动的基础。如何使机器人能够安全、高效地规划路径,成为了研究的热点之一。蚁群算法是一种基于觅食行为的启发式算法,具有全局搜索、自适应性等优点,被广泛应用于路径规划领域。本文将介绍基于改进蚁群算法的机器人路径规划算法,并对其进行分析和讨论。一、蚁群算法原理蚁群算法是一种模拟蚂蚁觅食行为的启发式算法,它基于蚂蚁在寻找食物过程中释放信息素和挥发物质的特性,模拟出蚂蚁群落的集体行为。蚁群算法的思路来自于对蚂蚁

基于改进蚁群算法的机器人路径规划研究.docx
基于改进蚁群算法的机器人路径规划研究基于改进蚁群算法的机器人路径规划研究摘要:随着机器人技术的不断发展,机器人路径规划成为机器人应用中的关键技术之一。蚁群算法作为一种自然群体行为模拟的优化方法,被广泛用于机器人路径规划问题中。本文对蚁群算法进行改进,提出了一种改进蚁群算法用于机器人路径规划的方法,并通过对比实验验证了该方法的有效性。关键词:蚁群算法,机器人路径规划,优化方法1.引言机器人路径规划是指根据机器人的起点、终点以及环境的约束条件,确定机器人在空间中的移动路径。路径规划的目标是寻找最佳路径,使机器