
智能农机远程操控系统.pdf

诗文****仙女


1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
智能农机远程操控系统.pdf
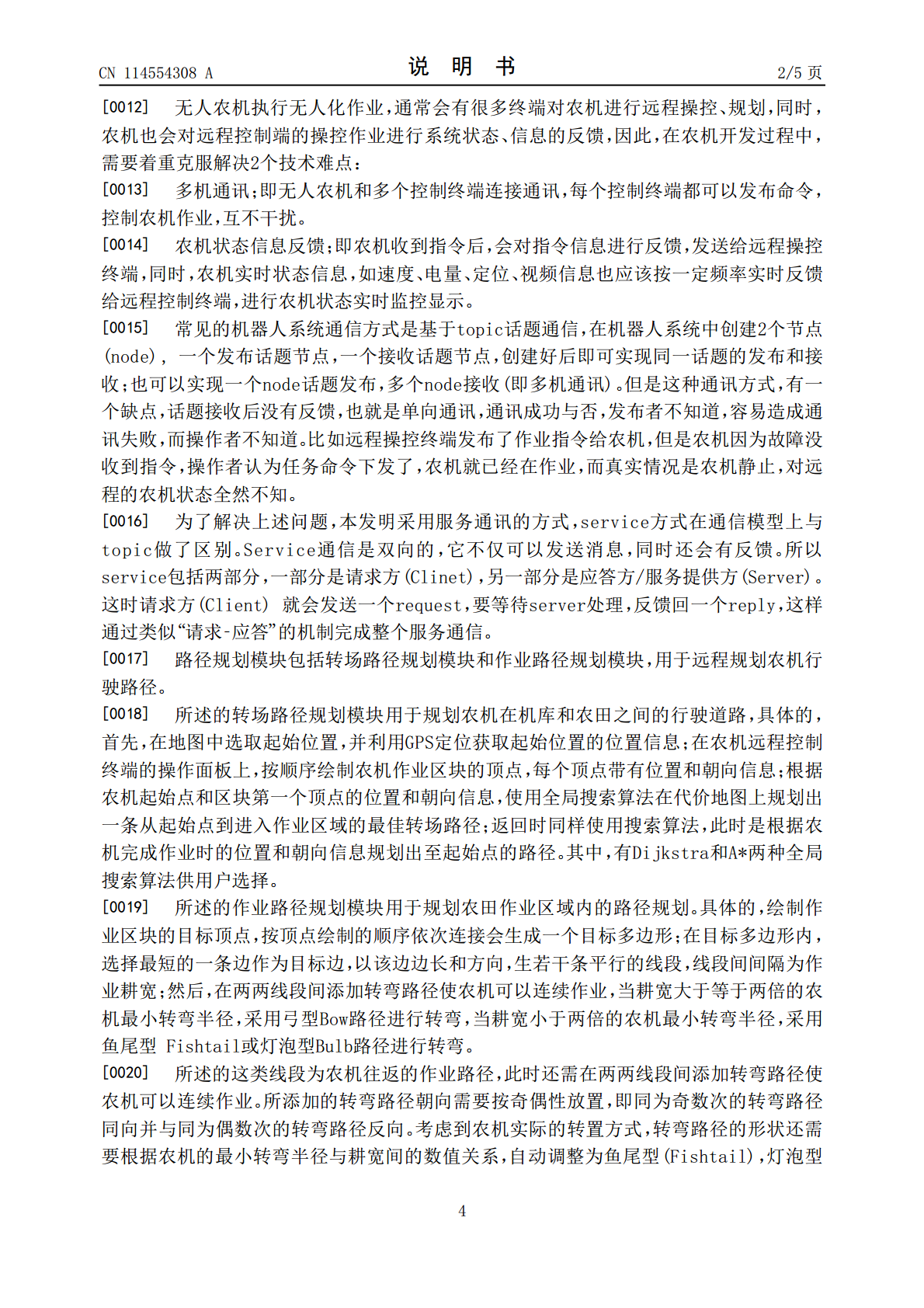
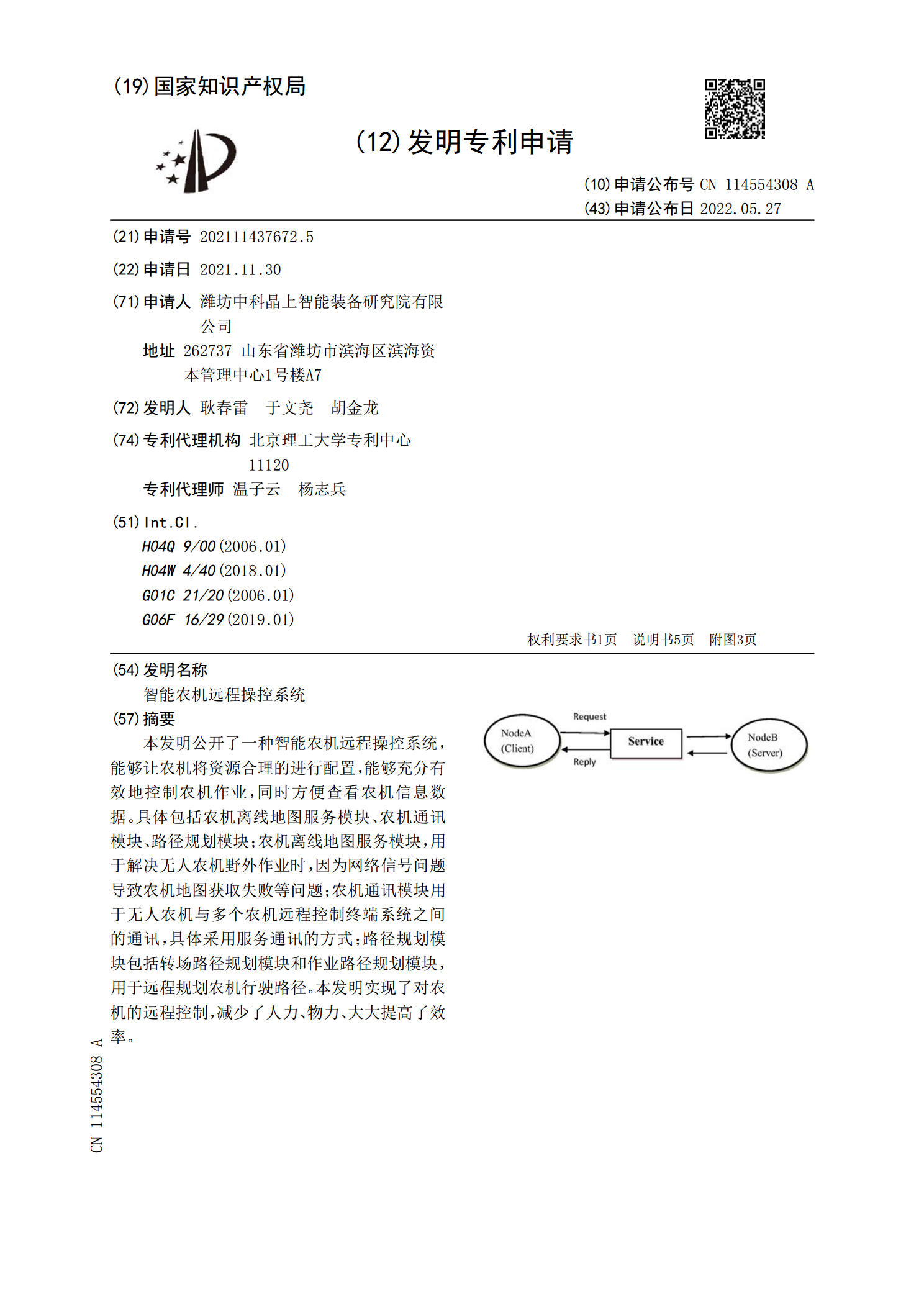
本发明公开了一种智能农机远程操控系统,能够让农机将资源合理的进行配置,能够充分有效地控制农机作业,同时方便查看农机信息数据。具体包括农机离线地图服务模块、农机通讯模块、路径规划模块;农机离线地图服务模块,用于解决无人农机野外作业时,因为网络信号问题导致农机地图获取失败等问题;农机通讯模块用于无人农机与多个农机远程控制终端系统之间的通讯,具体采用服务通讯的方式;路径规划模块包括转场路径规划模块和作业路径规划模块,用于远程规划农机行驶路径。本发明实现了对农机的远程控制,减少了人力、物力、大大提高了效率。

一种智能型农机远程操控装置及其操作系统.pdf
本发明涉及农机技术领域,尤其涉及一种智能型农机远程操控装置,包括车体和进水管,所述车体的内部设置有用于驱动车轮转动的电机,所述车体的上端设置有与外界进行信号传递的第一信号传递模块,所述车体上安装有两个相互对应的第一电动伸缩杆,所述第一电动伸缩杆为水平设置,且第一电动伸缩杆的伸缩端位于车体的两侧,所述第一电动伸缩杆的伸缩端上固定连接有竖直设置的第二电动伸缩杆,该装置使用时,通过土壤水势仪探头配合土壤水势仪对土壤含水量进行测量,当土壤含水量低时,红外信号发射器触发对应的红外信号接收器,使得对应的电磁阀打开,通

陶瓷窑炉远程监控智能操控系统.pdf
本发明公开了陶瓷窑炉远程监控智能操控系统,包括可编程控制器、电源、燃气调压阀、变频器、燃气喷嘴、高压风机、空气喷嘴、混合腔、燃烧器、远程监控设备、触控屏和数据存储器;在燃气喷嘴上设置有燃气压力传感器,且该燃气压力传感器通过燃气压力变送器与可编程控制电路相连接;在空气喷嘴上设置有空气压力传感器,且该空气压力传感器通过空气压力变送器与可编程控制电路相连接;燃烧器上设置有直接与可编程控制器相连接的温度传感器。本发明提供一种陶瓷窑炉远程监控智能操控系统,能够智能的完成对燃气与空气的配比过程,提高了燃气利用率,更好
陶瓷窑炉远程监控智能温控操控系统.pdf
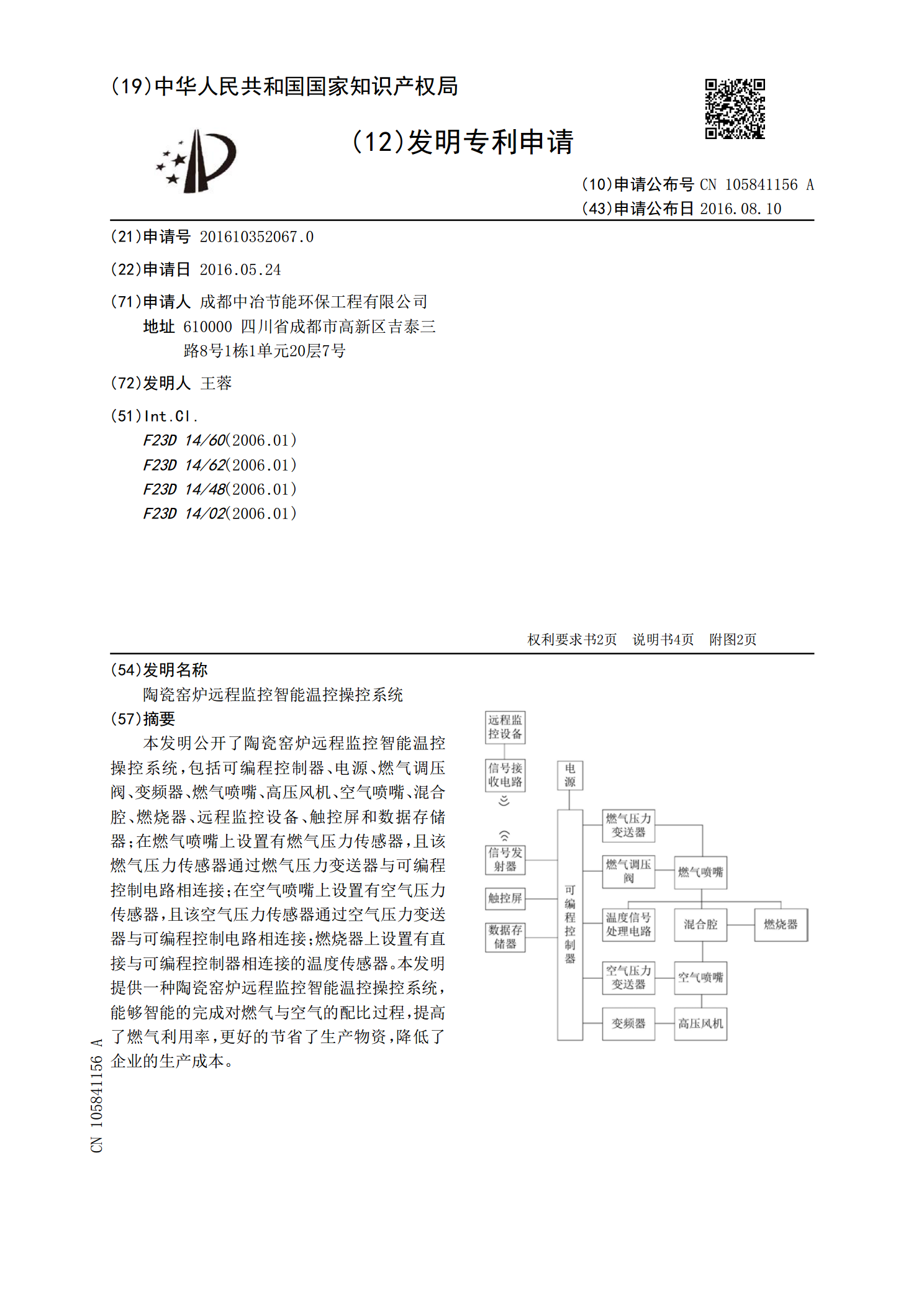
本发明公开了陶瓷窑炉远程监控智能温控操控系统,包括可编程控制器、电源、燃气调压阀、变频器、燃气喷嘴、高压风机、空气喷嘴、混合腔、燃烧器、远程监控设备、触控屏和数据存储器;在燃气喷嘴上设置有燃气压力传感器,且该燃气压力传感器通过燃气压力变送器与可编程控制电路相连接;在空气喷嘴上设置有空气压力传感器,且该空气压力传感器通过空气压力变送器与可编程控制电路相连接;燃烧器上设置有直接与可编程控制器相连接的温度传感器。本发明提供一种陶瓷窑炉远程监控智能温控操控系统,能够智能的完成对燃气与空气的配比过程,提高了燃气利用

陶瓷窑炉混成保护远程监控智能操控系统.pdf
本发明公开了陶瓷窑炉混成保护远程监控智能操控系统,包括可编程控制器、电源、燃气调压阀、变频器、燃气喷嘴、高压风机、空气喷嘴、混合腔、燃烧器、远程监控设备、触控屏和数据存储器;在燃气喷嘴上设置有燃气压力传感器,且该燃气压力传感器通过燃气压力变送器与可编程控制电路相连接;在空气喷嘴上设置有空气压力传感器,且该空气压力传感器通过空气压力变送器与可编程控制电路相连接;燃烧器上设置有直接与可编程控制器相连接的温度传感器。本发明提供一种陶瓷窑炉混成保护远程监控智能操控系统,能够智能的完成对燃气与空气的配比过程,提高了