
一种节水灌溉末端流量调节、测量及远程控制装置.pdf

曾琪****是我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种节水灌溉末端流量调节、测量及远程控制装置.pdf
本发明公开了一种节水灌溉末端流量调节、测量及远程控制装置,由灌溉首部、管网、流量调测一体装置、光伏供能装置、远程智能控制系统组成;管网的一端与灌溉首部连接,中间安装有若干流量调测一体装置,每个流量调测一体装置都配制相应的光伏供能装置和远程智能控制系统,流量调测一体装置由阀体和驱动模块组成,阀体通过开度调节流量,驱动模块由步进电机和减速器构成,驱动模块用于驱动柱塞活动调节大小,远程智能控制系统是基于python开发的远程调节阀开度决策模块,利用电脉冲计量和控制调节阀开度。该装置可监测并调控灌溉末端管道的流量

一种可调节角度节水灌溉装置.pdf
本发明公开的一种可调节角度节水灌溉装置,包括底座,所述底座内设有内腔,所述内腔左壁连通有开口向左的铁屑口,所述内腔后壁固连有两个衔接块,所述内腔后壁固连有支撑块,所述支撑块位于两个所述衔接块之间,所述内腔上壁转动连接有转动盘轴,所述转动盘轴上固连有转动盘,所述转动盘下端固连有拨动杆,且所述转动盘轴转动连接于所述支撑块内,本发明可通过湿度传感器控制电机启动,利用滚动齿轮与齿条配合实现节水灌溉自控喷水,同时拨动块与调整杆配合以及传动凸轮与偏心轮间歇调整喷水方位与角度,增大灌溉面积,同时节省大量的人力物力,提高
一种具有调节功能的农业节水灌溉装置.pdf
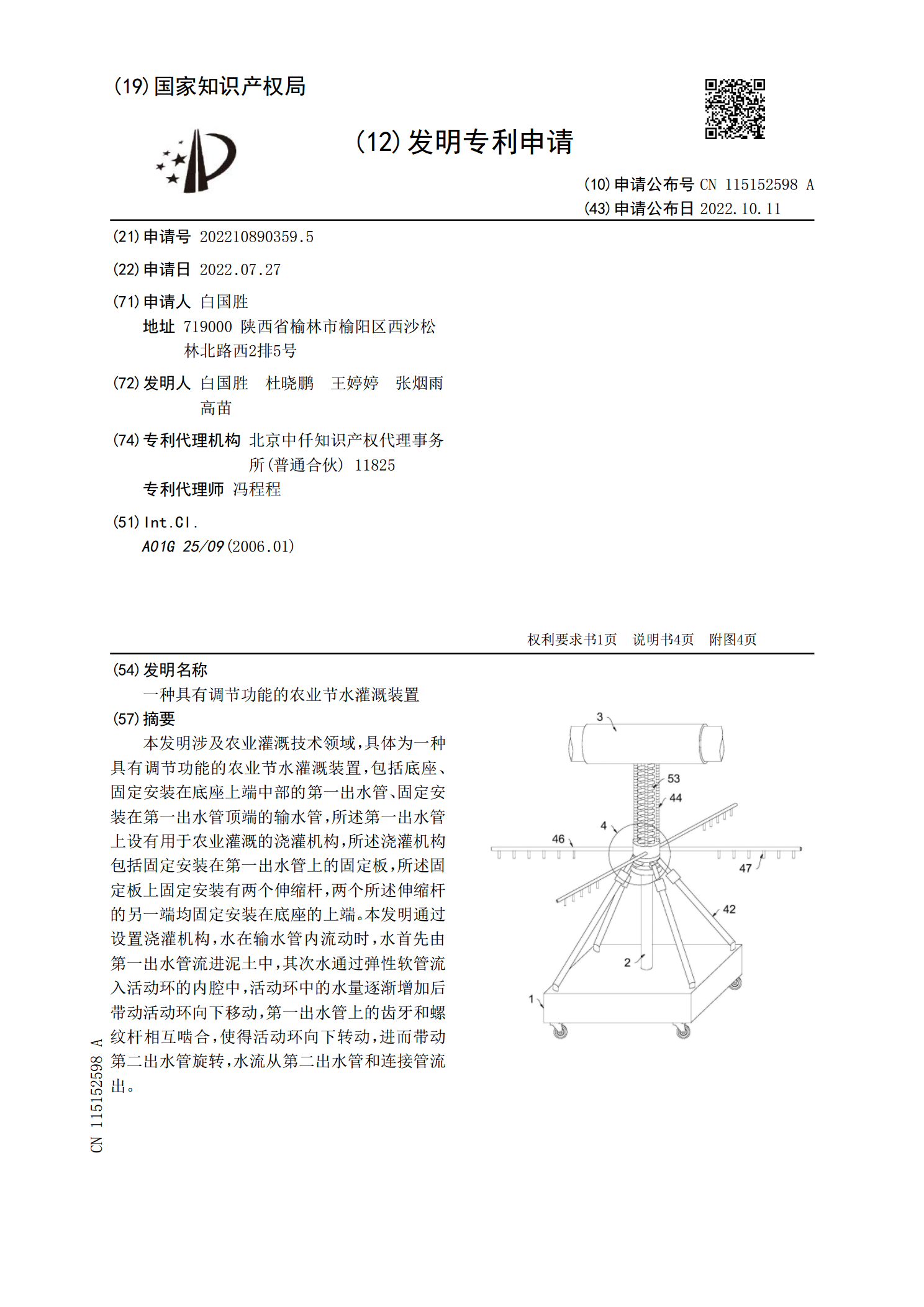
本发明涉及农业灌溉技术领域,具体为一种具有调节功能的农业节水灌溉装置,包括底座、固定安装在底座上端中部的第一出水管、固定安装在第一出水管顶端的输水管,所述第一出水管上设有用于农业灌溉的浇灌机构,所述浇灌机构包括固定安装在第一出水管上的固定板,所述固定板上固定安装有两个伸缩杆,两个所述伸缩杆的另一端均固定安装在底座的上端。本发明通过设置浇灌机构,水在输水管内流动时,水首先由第一出水管流进泥土中,其次水通过弹性软管流入活动环的内腔中,活动环中的水量逐渐增加后带动活动环向下移动,第一出水管上的齿牙和螺纹杆相互啮
一种具有调节功能的农业节水灌溉装置.pdf
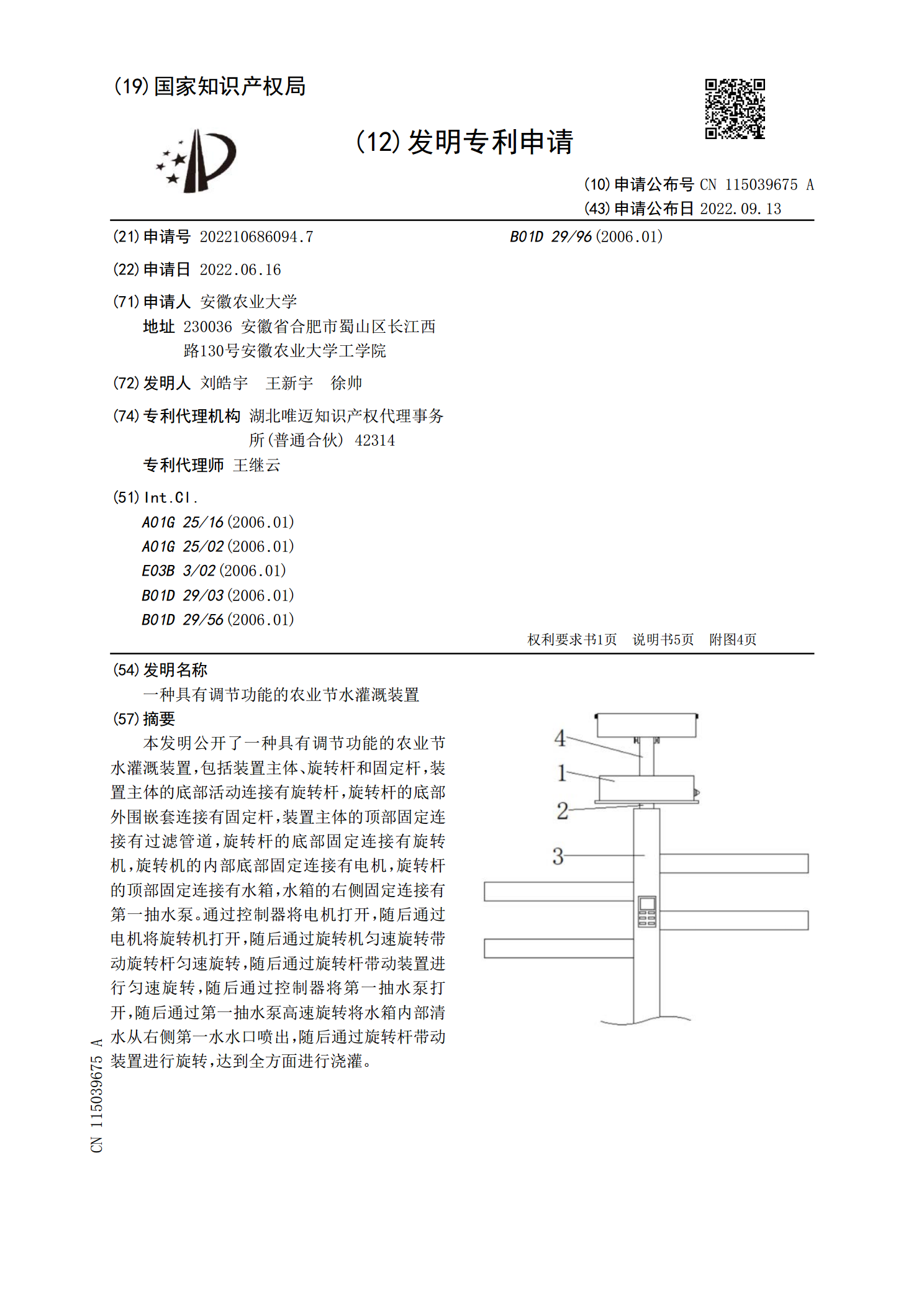
本发明公开了一种具有调节功能的农业节水灌溉装置,包括装置主体、旋转杆和固定杆,装置主体的底部活动连接有旋转杆,旋转杆的底部外围嵌套连接有固定杆,装置主体的顶部固定连接有过滤管道,旋转杆的底部固定连接有旋转机,旋转机的内部底部固定连接有电机,旋转杆的顶部固定连接有水箱,水箱的右侧固定连接有第一抽水泵。通过控制器将电机打开,随后通过电机将旋转机打开,随后通过旋转机匀速旋转带动旋转杆匀速旋转,随后通过旋转杆带动装置进行匀速旋转,随后通过控制器将第一抽水泵打开,随后通过第一抽水泵高速旋转将水箱内部清水从右侧第一水
一种燃油调节及流量测量装置.pdf
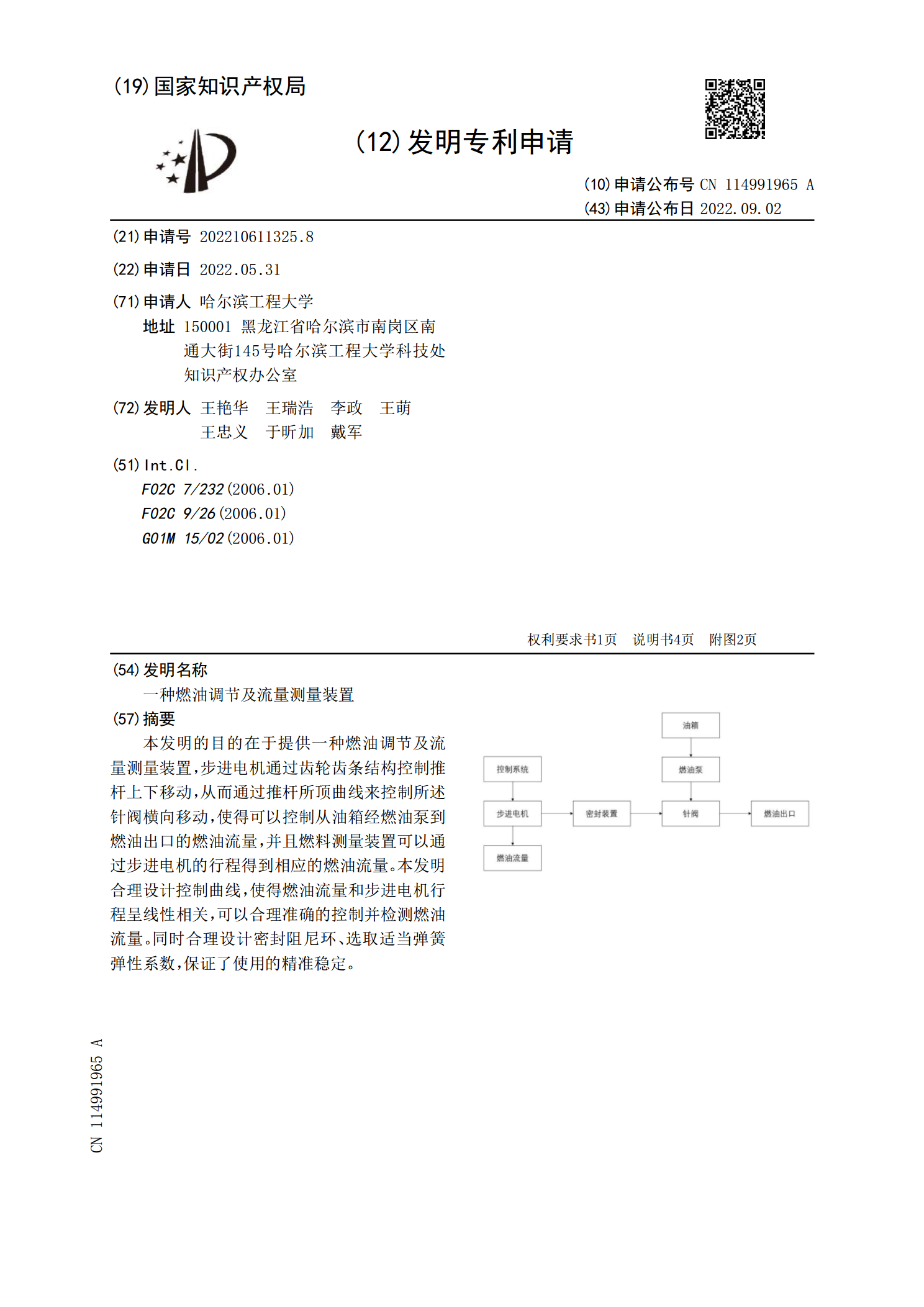
本发明的目的在于提供一种燃油调节及流量测量装置,步进电机通过齿轮齿条结构控制推杆上下移动,从而通过推杆所顶曲线来控制所述针阀横向移动,使得可以控制从油箱经燃油泵到燃油出口的燃油流量,并且燃料测量装置可以通过步进电机的行程得到相应的燃油流量。本发明合理设计控制曲线,使得燃油流量和步进电机行程呈线性相关,可以合理准确的控制并检测燃油流量。同时合理设计密封阻尼环、选取适当弹簧弹性系数,保证了使用的精准稳定。