
一种凝视五维高光谱偏振深度成像系统.pdf

是你****优呀


1/7
2/7

3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种凝视五维高光谱偏振深度成像系统.pdf
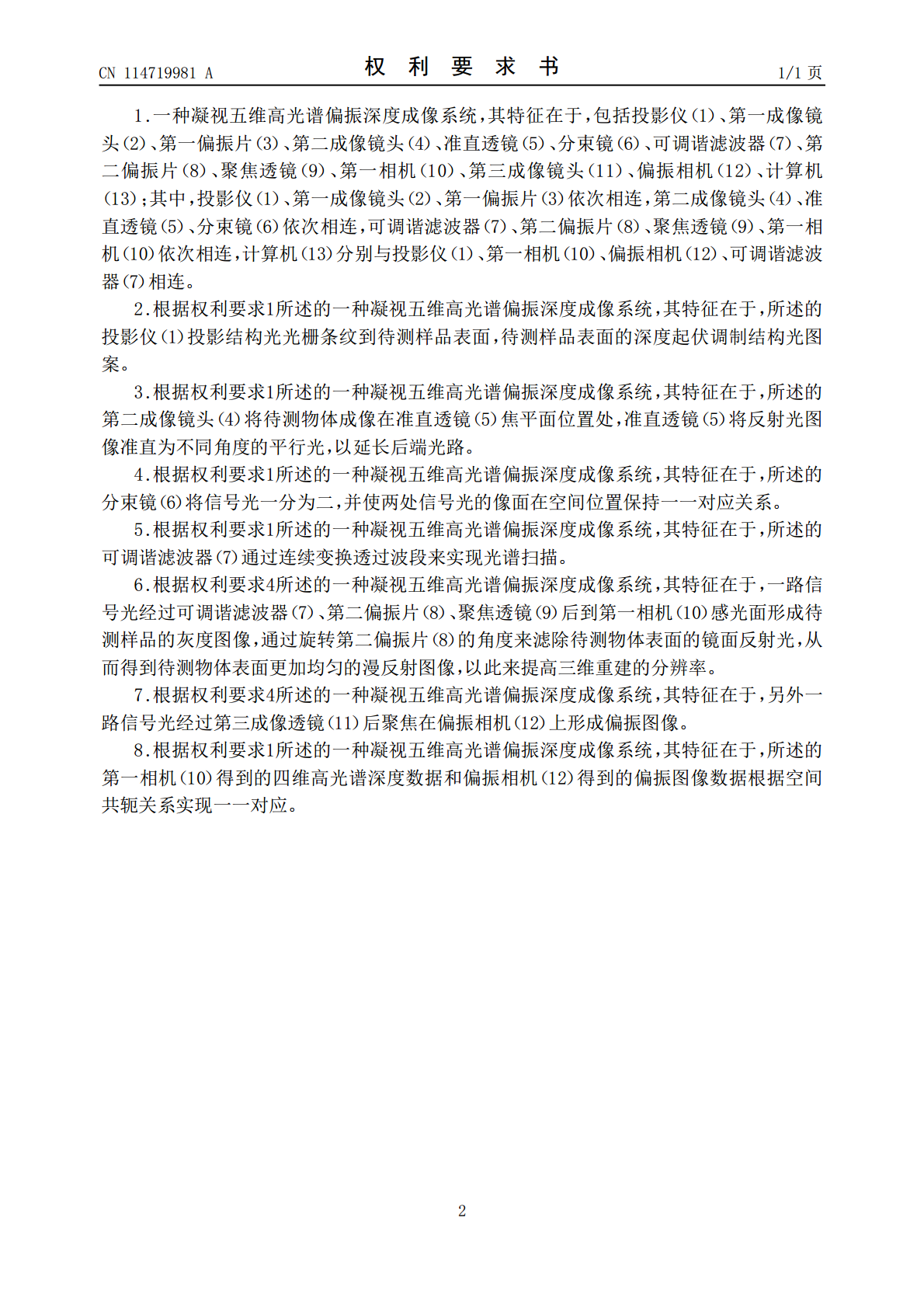
本发明公开了一种凝视五维高光谱偏振深度成像系统,包括投影仪、第一成像镜头、第一偏振片、第二成像镜头、准直透镜、分束镜、可调谐滤波器、第二偏振片、聚焦透镜、第一相机、第三成像镜头、偏振相机、计算机;其中,投影仪、第一成像镜头、第一偏振片依次相连,第二成像镜头、准直透镜、分束镜依次相连,可调谐滤波器、第二偏振片、聚焦透镜、第一相机依次相连,计算机分别与投影仪、第一相机、偏振相机,可调谐滤波器相连。本发明有机的融合了高光谱成像,三维成像,偏振成像技术,形成一体化五维高光谱偏振深度成像系统,具有深度分辨率高,扫描
一种凝视型线激光高光谱深度成像系统.pdf
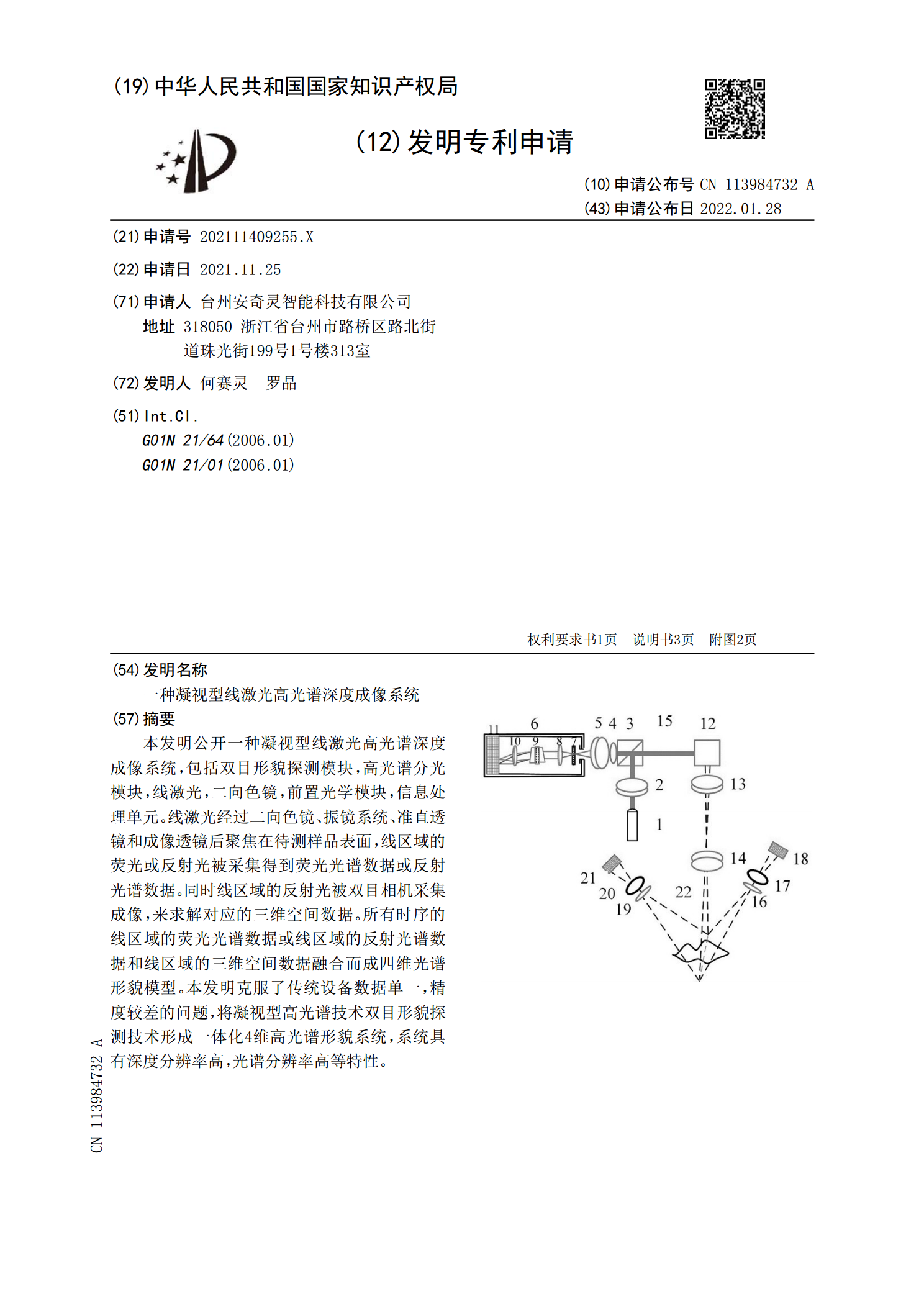
本发明公开一种凝视型线激光高光谱深度成像系统,包括双目形貌探测模块,高光谱分光模块,线激光,二向色镜,前置光学模块,信息处理单元。线激光经过二向色镜、振镜系统、准直透镜和成像透镜后聚焦在待测样品表面,线区域的荧光或反射光被采集得到荧光光谱数据或反射光谱数据。同时线区域的反射光被双目相机采集成像,来求解对应的三维空间数据。所有时序的线区域的荧光光谱数据或线区域的反射光谱数据和线区域的三维空间数据融合而成四维光谱形貌模型。本发明克服了传统设备数据单一,精度较差的问题,将凝视型高光谱技术双目形貌探测技术形成一体

一种光谱偏振成像系统设计及应用.docx
一种光谱偏振成像系统设计及应用光谱偏振成像系统设计及应用摘要:随着光谱偏振成像技术的不断发展和创新,其在农业、医学、环境等领域的应用越来越广泛。本文将介绍光谱偏振成像系统的设计原理和构成,并探讨其在农作物生长监测、癌症早期诊断、空气污染监测等方面的应用。一、引言光谱偏振成像是将光谱成像技术与偏振技术相结合的一种新型成像技术。偏振成像技术通过观察光的偏振状态来获取样品的光学特性信息,而光谱成像技术则可以获取样品不同波长下的光学信息。光谱偏振成像系统结合了两种技术的优势,能够提供更加丰富的光学信息,具有广泛的

一种全偏振高光谱干涉成像装置及方法.pdf
本发明公开了一种全偏振高光谱干涉成像装置及方法,利用电控双折射器件进行偏振相位调制,并通过偏振分光器获得的双光路进行像素配准图像的采集,并进行高光谱和全偏振信息的解算。目标地物的散射光由前置光学系统收集并由偏振相位调制器进行偏振相位调制后,在偏振分光棱镜对光进行分路,分为O光和E光两路,在保证图像配准的条件下进行干涉成像与同步测量,并将得到的一系列图像信息送入系统处理;本发明不仅保留了高的光通量和高光谱获取的技术特征,还实现的全偏振遥感测量;获得的全偏振高光谱遥感成像信息能够进一步的提高目标地物的空间分辨

高光谱显微偏振成像系统的研究与应用的任务书.docx
高光谱显微偏振成像系统的研究与应用的任务书任务书一、任务目的:本任务旨在研究和应用高光谱显微偏振成像系统,探究其在生命科学、材料科学等领域的应用,为相关领域的研究提供参考。二、任务要求:1.了解高光谱显微偏振成像系统的原理、结构和技术特点;2.熟悉高光谱显微偏振成像系统在生命科学、材料科学等领域的应用;3.通过实验和模拟仿真等手段,研究高光谱显微偏振成像系统的性能和特点;4.撰写实验报告、研究论文或者技术报告,介绍高光谱显微偏振成像系统的原理、应用和研究成果。三、实验方案:1.了解高光谱显微偏振成像系统的